La ventilación positiva del cárter es un sistema que se desarrolló para eliminar vapores nocivos del motor y para evitar que esos vapores sean expulsados en la atmósfera. El sistema PCV hace esto mediante el uso de vacío múltiple para extraiga los vapores del cárter al colector de admisión. Luego se transporta vapor con la mezcla de combustible / aire en las cámaras de combustión donde se quema. El flujo o la circulación dentro del sistema está controlado por la válvula PCV. La válvual PCV es tan eficaz como sistema de ventilación del cárter como descontaminante.
Antes de que se inventara la PCV, los vapores soplados simplemente se ventilaban a la atmósfera a través de un «tubo de tiro de carretera» que iba desde un orificio de ventilación en una tapa de válvula o una tapa de valle hacia el suelo.
En 1961, aparecieron los primeros sistemas PCV en los automóviles de California. El sistema PCV utilizó vacío de admisión para desviar los vapores de escape hacia el colector de admisión. Esto permitió que el HC se volviera a quemar y se eliminaran los vapores que soplaban como fuente de contaminación.
El sistema demostró ser tan efectivo que los sistemas PCV «abiertos» se agregaron a la mayoría de los automóviles en todo el país en 1963. Un sistema PCV abierto aspira aire a través de un filtro de malla dentro de la tapa de llenado de aceite o un respiradero en una tapa de válvula. El flujo de aire fresco a través del cárter ayudó a extraer la humedad del aceite para prolongar la vida útil del aceite y reducir los lodos. El único inconveniente de estos primeros sistemas PCV abiertos era que los vapores que soplaban aún podían acumularse a altas velocidades y cargas del motor, y escapar a la atmósfera a través del tapón de llenado de aceite o el respiradero de la tapa de la válvula.
En 1968, se agregaron sistemas PCV «cerrados» a la mayoría de los automóviles. La entrada del respiradero se reubicó dentro de la carcasa del filtro de aire, por lo que si la presión se acumulaba, se desbordaría hacia el filtro de aire y sería succionada por el carburador. No se escaparían vapores a la atmósfera.
Funcionamiento
El componente principal del sistema PCV es la válvula PCV, una válvula simple cargada por resorte con un pivote deslizante en el interior. El pivote se estrecha como una bala, por lo que aumentará o disminuirá el flujo de aire según su posición dentro de la carcasa de la válvula. El movimiento del pivote hacia arriba y hacia abajo cambia la abertura del orificio para regular el volumen de aire que pasa a través de la válvula PCV.
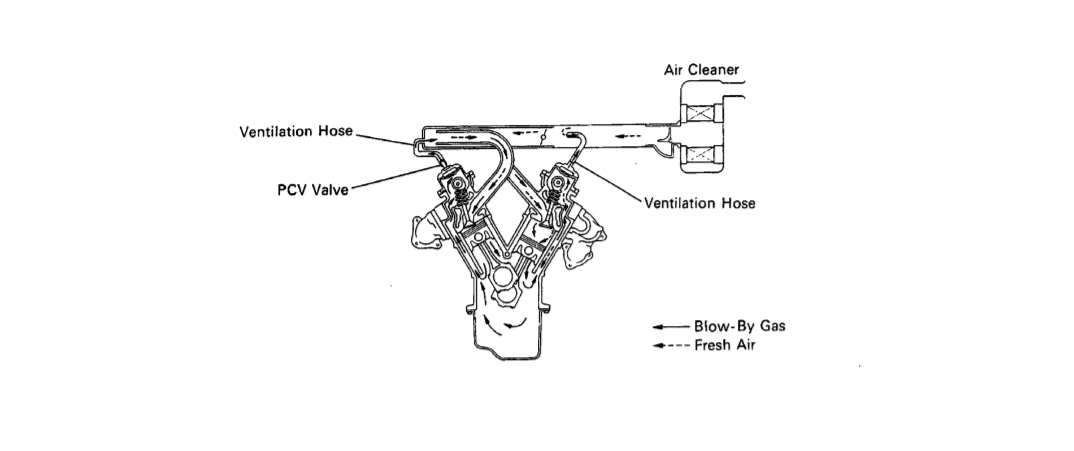
La válvula PCV generalmente se ubica en una tapa de válvula o en el valle de admisión, y generalmente encaja en una arandela de goma. La ubicación de la válvula permite que extraiga los vapores del interior del motor sin aspirar aceite del cárter (los deflectores dentro de la tapa de la válvula o la tapa del valle se desvían y ayudan a separar las gotas de aceite de los vapores que soplan).
Una manguera conecta la parte superior de la válvula PCV a un puerto de vacío en el cuerpo del acelerador, carburador o colector de admisión. Esto permite que los vapores se desvíen directamente al motor sin atascar el cuerpo del acelerador o el carburador.
Debido a que el sistema PCV extrae aire y gases de escape hacia el múltiple de admisión, tiene el mismo efecto en la mezcla de aire / combustible que una fuga de vacío. Esto se compensa con la calibración del carburador o del sistema de inyección de combustible. En consecuencia, el sistema PCV no tiene ningún efecto neto sobre el ahorro de combustible, las emisiones o el rendimiento del motor, siempre que todo funcione correctamente.
ADVERTENCIA: Quitar o desconectar el sistema PCV en un intento por mejorar el rendimiento del motor no gana nada y es ilegal. Las reglas de la EPA prohíben la manipulación de cualquier dispositivo de control de emisiones. La desactivación o desconexión del sistema PCV también puede permitir que se acumule humedad en el cárter, lo que reducirá la vida útil del aceite y promoverá la formación de lodos que dañan el motor.
Sistemas abiertos PCV
El sistema abierto aspira aire fresco a través de un tapón de llenado de aceite ventilado. Esto no presenta problema siempre que el volumen de vapor sea mínimo. Sin embargo, cuando el cárter el vapor se vuelve excesivo es forzado hacia atrás a través del tapón de llenado de aceite ventilado y en la atmósfera abierta. El sistema PCV abierto, aunque logró eliminar vapores contaminados del cárter, no es completamente eficaz como un dispositivo de control de la contaminación.
Sistemas PCV cerrados
El sistema cerrado de PCV extrae aire fresco de la carcasa del filtro de aire. El tapón de aceite de este sistema NO está ventilado. Consecuentemente, el exceso de vapor será transportado de vuelta a la carcasa del filtro de aire y de allí al colector de admisión. El sistema cerrado evita que el vapor, ya sea normal o excesivo, llegue al
atmósfera. El sistema cerrado es muy eficaz como control de la contaminación del aire
La válvula PCV
El caudal de una válvula PCV está calibrado para una aplicación de motor específica. Por lo tanto, para que el sistema funcione normalmente, la válvula PCV debe ajustar el caudal a medida que cambian las condiciones de funcionamiento.
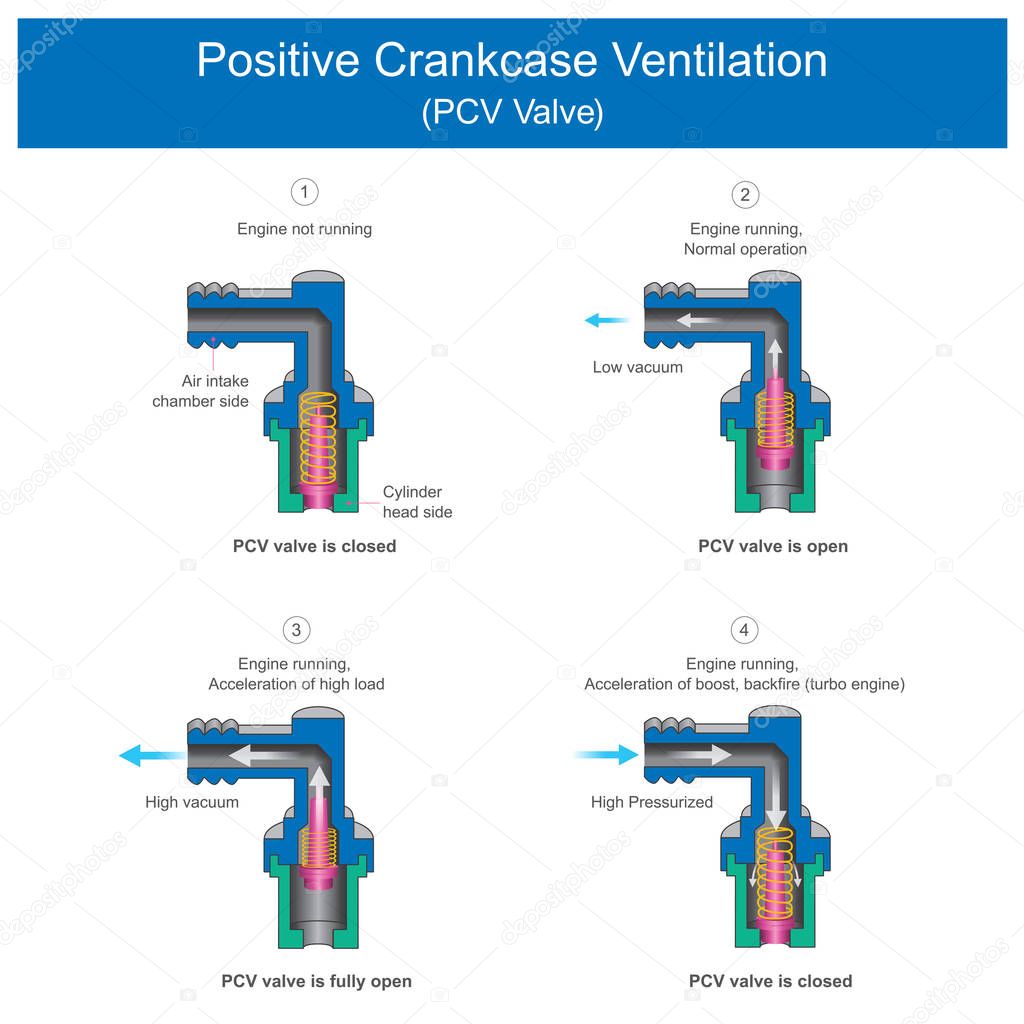
Cuando el motor está apagado, el resorte dentro de la válvula empuja el pivote hasta cerrarlo para sellar el cárter y evitar el escape de vapores residuales a la atmósfera.
Cuando el motor arranca, el vacío en el colector de admisión tira del pivote y succiona la válvula PCV para abrirla. El pivote se tira hacia arriba contra el resorte y se mueve a su posición más alta. Pero la forma cónica del pivote no permite un flujo máximo en esta posición. En cambio, restringe el flujo para que el motor funcione sin problemas.
Lo mismo ocurre durante la desaceleración cuando el vacío de admisión es alto. El pivote se tira completamente hacia arriba para reducir el flujo y minimizar el efecto del escape en las emisiones de desaceleración.
Cuando el motor está navegando con carga ligera y con aceleración parcial, hay menos vacío de admisión y menos tirón en el pivote. Esto permite que el pivote se deslice hacia abajo a una posición de rango medio y permita más flujo de aire.
En condiciones de alta carga o aceleración fuerte, el vacío de admisión cae aún más, lo que permite que el resorte dentro de la válvula PCV empuje la válvula de pivote aún más abajo hasta su posición de flujo máximo. Si la presión de purga se acumula más rápido de lo que el sistema PCV puede manejar, el exceso de presión fluye de regreso a través de la manguera de ventilación al filtro de aire y es succionado nuevamente al motor y quemado.
En el caso de que el motor se vuelva contraproducente, el aumento repentino de la presión dentro del colector de admisión retrocede a través de la manguera PCV y cierra de golpe el pivote. Esto evita que la llama regrese a través de la válvula PCV y posiblemente encienda los vapores de combustible dentro del cárter.