Se utiliza un sensor de posición del acelerador (TPS) para monitorear la posición de la válvula del acelerador en los motores de combustión interna. El TPS generalmente se encuentra en el eje de la válvula de mariposa en el cuerpo de aceleración para que pueda monitorear directamente su posición. El sensor TPS es un potenciómetro que consiste en una una resistencia variable en función de la posición de la válvula del acelerador La señal del sensor es utilizada por la unidad de control del motor (PCM) como entrada a su sistema de control. La sincronización del encendido y la sincronización de la inyección de combustible, se alteran según la posición de la válvula de mariposa y también según la velocidad de cambio de esa posición. Algunas modificaciones de la válvula del acelerador tienen interruptores finales integrados. Son sensores de posición de aceleración cerrada (CTPS) y a menudo incluyen un sensor de aceleración totalmente abierta (WOT) que está montado en el pedal del acelerador. La señal de posición del acelerador se puede producir a partir de un simple contacto (TS) o un potenciómetro (TPS), y también de un sensor combinado TS / TPS. Algunos sistemas utilizan ambos tipos como elementos separados.
Funcionamiento
Sensor de potenciómetro del acelerador (TPS)
El TPS proporciona al PCM información sobre el ralentí, la desaceleración, la tasa de aceleración y el estado de la válvula de mariposa completamente abierta (WOT).
El TPS es un potenciómetro de tres hilos.
Primer cable se aplica un voltaje de + 5V a la capa resistiva del sensor
Segundo cable cierra el circuito del sensor a tierra.
Tercer cable está conectado a la pluma del potenciómetro, por lo que cambia la resistencia y, por lo tanto, el voltaje de la señal que regresa a la PCM
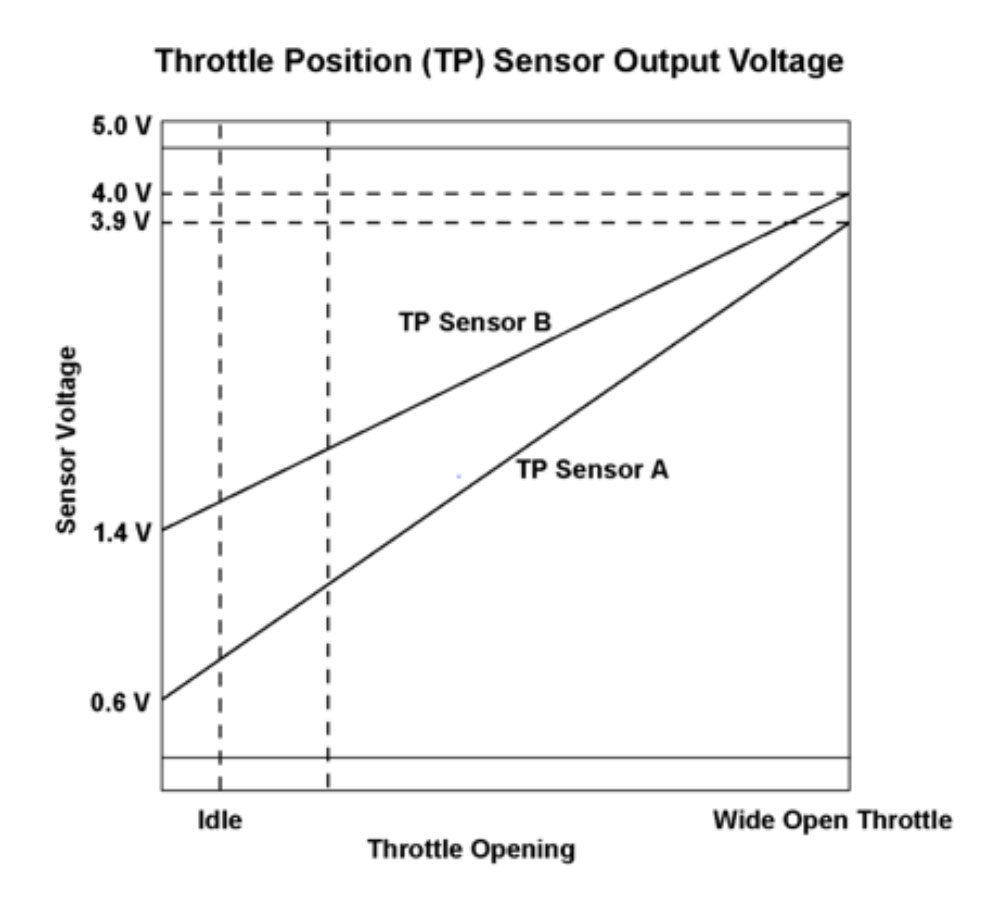
Según el voltaje recibido, la PCM puede calcular el ralentí (por debajo de 0,7 V), la carga completa (aproximadamente 4,5 V) y la velocidad de apertura de la válvula de mariposa. En estado de carga completa, la PCM proporciona un mayor enriquecimiento de la mezcla de combustible. En el modo de desaceleración (válvula de mariposa cerrada y velocidad del motor por encima de ciertas RPM), la computadora de a bordo apaga la inyección de combustible. El suministro de combustible se reanuda después de que la velocidad del motor alcanza su valor de ralentí o cuando la válvula de mariposa está abierta. Algunos coches permiten el ajuste de estos valores.
Pruebas al TPS
Verifique el voltaje del TPS
Conecte el terminal negativo de un voltímetro a la tierra del motor.
Determine los terminales de tierra, inactivo y de carga completa.
NOTA: La mayoría de los potenciómetros del acelerador tienen tres terminales, pero algunos pueden tener contactos adicionales, que funcionan como interruptores del acelerador. Si existe tal contacto, debe verificarse como se describe arriba para el interruptor del acelerador.
Conecte el terminal positivo del voltímetro al cable conectado a la señal de contacto del potenciómetro de la válvula de mariposa.
Encienda el encendido, pero no arranque el motor. En la mayoría de los sistemas, la lectura de voltaje debe ser inferior a 0,7 V.
Abra y cierre la válvula de mariposa varias veces, comprobando la suavidad de la tensión ascendente.
Verificar la resistencia del TPS
Conecte un ohmímetro entre el limpiador del potenciómetro y el terminal de voltaje de referencia o entre el limpiador del potenciómetro y la tierra.
Abra y cierre la válvula del acelerador varias veces y verifique la suavidad de la variación de resistencia. Si la resistencia del potenciómetro es infinita o cero, esto indica un mal funcionamiento.
No se muestran los valores exactos de la resistencia del potenciómetro del acelerador. Una de las razones es que muchos fabricantes no publican datos de control. El hecho de que la resistencia del potenciómetro se mantenga dentro de los límites es menos importante que el correcto funcionamiento del potenciómetro, es decir, la resistencia cambia suavemente al mover la válvula de mariposa.
Conecte un ohmímetro entre la tierra y los terminales de voltaje de referencia. La resistencia debe ser constante.
Si la resistencia es infinita o baja, se debe reemplazar el potenciómetro
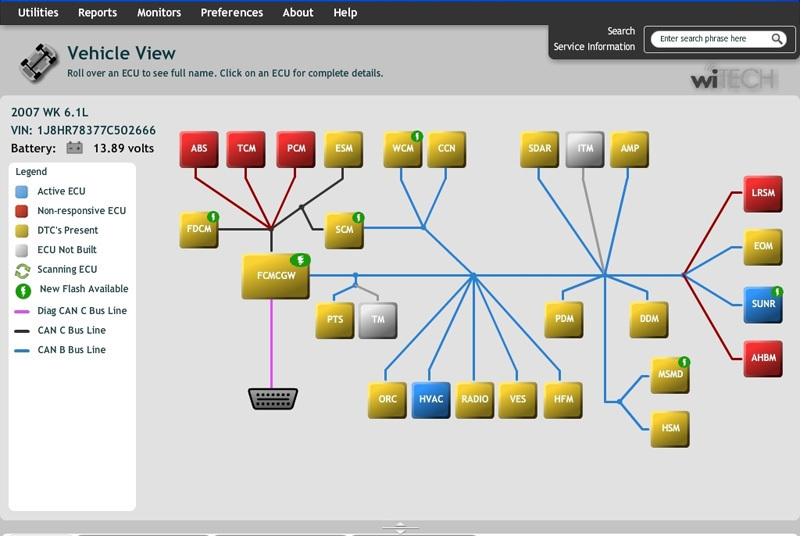
CANbus CAN (Controller Area Network) es un sistema de comunicación en serie que se utiliza en muchos vehículos de motor para conectar sistemas y sensores individuales, como alternativa a los telares de cables múltiples convencionales.
La mayoría de las redes CAN de vehículos trabajan a una velocidad de bus de 250KB / so 500KB / s, aunque hay sistemas disponibles que operan hasta 1MHz.
El principal componente del CANbus es el controlador CAN. Este se conecta a todos los componentes (nodos) de la red a través de los cables CAN-H y CAN-L. La señal es diferencial, es decir, cada una de las líneas CAN está referenciada a la otra línea, no a la tierra del vehículo. Cada nodo de la red tiene un identificador único. Dado que las ECU en el bus están conectadas en en paralelo con una resistencia de 60Ohms, todos los nodos identifican datos todo el tiempo. Un nodo solo responde cuando detecta su propio identificador. Por ejemplo, cuando la ECU del ABS envía el comando para activar la unidad ABS, responde en consecuencia, pero el resto de la red ignorará el comando. Los nodos individuales se pueden eliminar de la red, sin afectar a los demás nodos.
Dado que muchos componentes diferentes del vehículo pueden compartir el mismo hardware de bus, es importante que el ancho de banda CANbus disponible se asigne primero a los sistemas más críticos para la seguridad. Los nodos generalmente se asignan a uno de varios niveles de prioridad. Por ejemplo, los controles PCM, ABS, AIRBAG, TCM, ESP son de suma importancia desde el punto de vista de la seguridad y se sitúan en el CAN High, se activarán antes que los menos críticos. Los dispositivos de audio y navegación suelen tener una prioridad media (2), y la simple activación de la iluminación puede tener la prioridad más baja (3) por lo que se localizan en el CAN Low.
Los vehículos más recientes utilizan hasta 3 redes CAN independientes, generalmente de diferentes velocidades conectadas entre sí por pasarelas. Por ejemplo, las funciones de gestión del motor pueden estar en un bus de alta velocidad a 500 KB/s y los sistemas de chasis se ejecutan en un bus CAN de 250 KB / s.
Método de diagnóstico
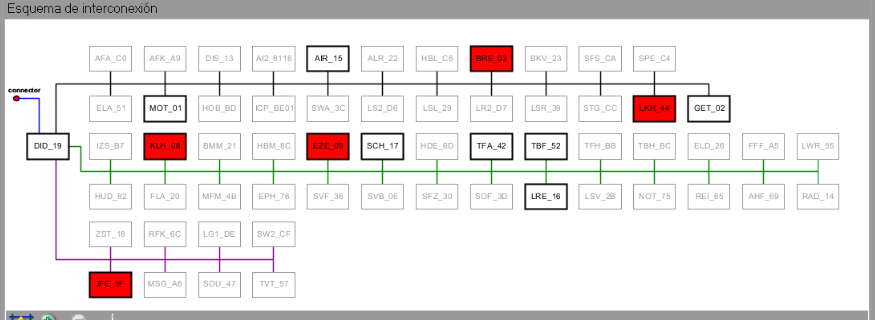
Pare realizar el correcto diagnóstico de la RED CAN de tal modo que estamos teniendo problemas con comunicación con alguno de los modulos y/o computadoras de control pertenecientes a una red estándar Bus CAN + y Bus CAN – o registra muchos códigos «U» ocasionados por problemas de comunicación o con el propio escáner.
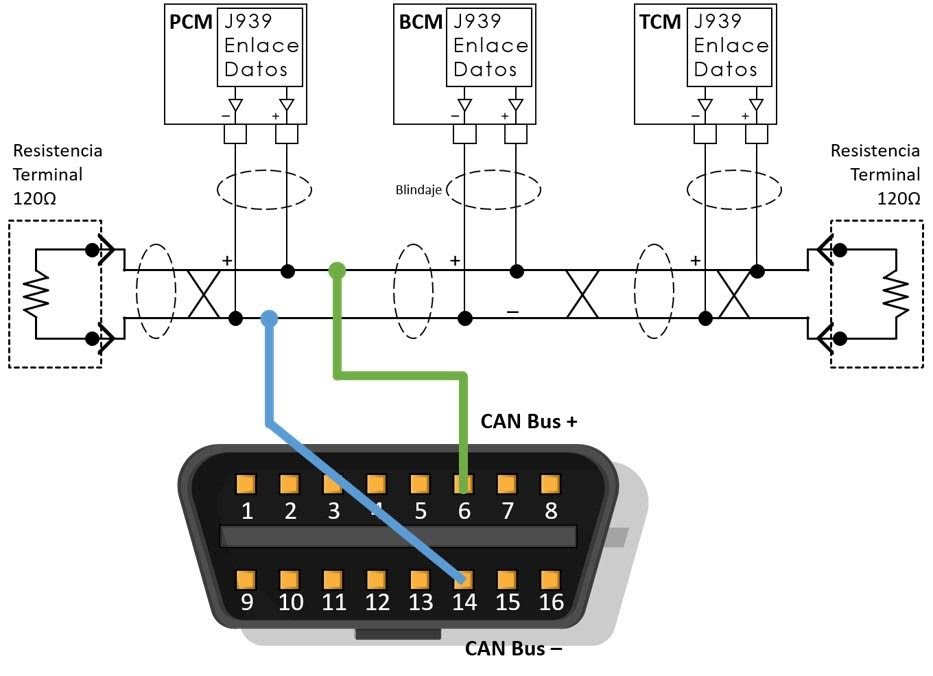
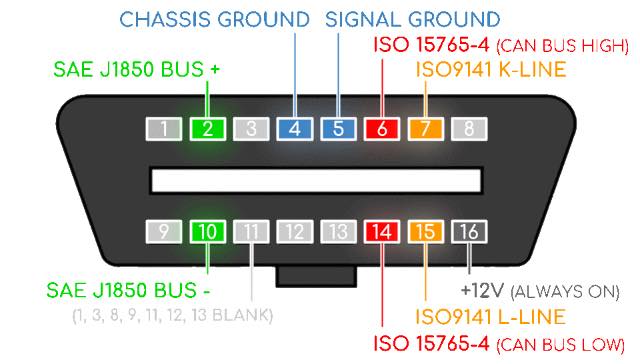
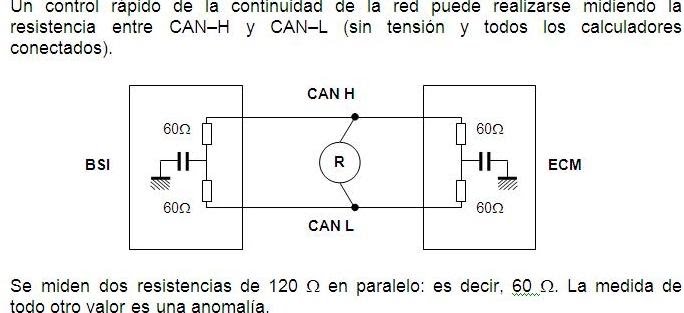
La información importante que se debe de contemplar es que las redes CAN utilizan una resistencia terminal en cada extremo del par de cables trenzados del Bus CAN. En las antiguas redes CAN cada resistencia terminal era de 120 Ohms. Este par de resistencias terminales pueden hallarse en el interior de un par de módulos correspondientes ubicados en los extremos del Bus o son resistencias físicas que las podemos encontrar conectadas al Bus o pueden también estar en la caja de los fusibles. Como ambas resistencias de 120 Ohms están instaladas en paralelo, según la ley de Ohm, su resistencia total deber ser: 60 Ohms. Tal lectura se comprueba, con la batera desconectada, entre los pines 6 y 14 del conector OBD II y utilizando un multímetro en la escala de Ohms para poder medir ese valor.
La red Bus CAN se encuentra en buen estado si la resistencia total entre los pines 6 y 14 del conector DLC es 60 Ohms. Si midiera 120 Ohms, posiblemente existe un circuito abierto en el cableado o en una de las resistencias terminales. Generalmente las resistencias terminales están integradas en módulos correspondientes y si la medición es 120 Ohms entre los pines 6 y 14 del conector DLC quiere decir que lo anterior esta sucediendo alguna avería en cableado o resistencis.
Para aplicar la metodología de rastreo de circuito abierto se procede a desconectar el conector de los módulos unidos la red CAN, uno por vez, para identificar algún cambio en la resistencia total entre los pines 6 y 14 del conector DLC . Si la resistencia total cae a 0 Ohms, se deduce que el último módulo desconectado esta en buenas dondiciones y el problema de circuito abierto está en el otro módulo o su cableado. Para asegurarse se instala una resistencia de 120 Ohms entre los pines de la red Bus CAN en el conector del módulo «defectuoso» desenchufado y mido la resistencia total entre los terminales 6 y 14 del enchufe OBD II. Si ahora registro una resistencia total de 60 Ohms, confirmo que el problema se encuentra en el módulo desenchufado.
Visualización de la red CAN con Osciloscopio
Señal CAN detalle General
Se puede contemplar que los datos se intercambian continuamente a lo largo del CANbus, y es posible verificar que los niveles de voltaje pico a pico sean correctos y que haya una señal presente en ambas líneas CAN. CAN usa una señal diferencial y la señal en una línea debe ser una imagen reflejada coincidente de los datos en la otra línea. La razón habitual para examinar las señales CAN es cuando OBD ha indicado una falla CAN, o para verificar la conexión CAN a un nodo CAN que se sospecha que está defectuoso. (ECU) Se debe consultar el manual del fabricante de vehículos para obtener parámetros de forma de onda precisos.
Los siguientes datos CAN se capturan en una base de tiempo mucho más rápida y permiten ver los cambios de estado individuales. Esto permite verificar la naturaleza de imagen especular de las señales y la coincidencia de los bordes.
Señal CAN en detalle
Para este caso se puede contemplar que las señales son iguales y opuestas, y que tienen la misma amplitud. Los bordes están limpios y coinciden entre sí. Esto muestra que el CANbus está habilitando la comunicación entre los nodos y la unidad de controlador CAN. Esta prueba verifica efectivamente la integridad del bus en este punto de la red CAN, y si una ECU (nodo) en particular no responde correctamente, es probable que la falla sea la propia ECU. El resto del BUS debería funcionar correctamente.
Las señales CAN «montadas» en el voltaje de polarización
Las señales CAN sin la visualización del voltaje de polarización
1. CAN Bus funcionando correctamente
En la imagen anterior se muestran las dos señales de las ondas (CAN_H y CAN_L, una reflejo de la otra) y justo debajo la resta de ambas señales y debe cumplir las siguientes características
El voltaje del cable H (High ó CAN_H) ha de estar entre 2,6 – 3,5V.
El voltaje del cable L (Low ó CAN_L) ha de estar entre 2.3 – 2,5V.
Dígito “1” (bit recesivo): 2,5V para CAN_H y CAN_L.
Dígito “0” (bit dominante): 3,5V para CAN_H y 1,5V para CAN_L.
Ahora vuelve un momento a la imagen anterior. ¿Qué es lo que ves? Exactamente eso, ceros y unos (señales cuadradas) con unos voltajes concretos (según el cable) viajando por dos cables (CAN_H y CAN_L) , siendo la forma de uno el reflejo del otro (por seguridad, ¿recuerdas?). Las cosas van cuadrando. Fetén.
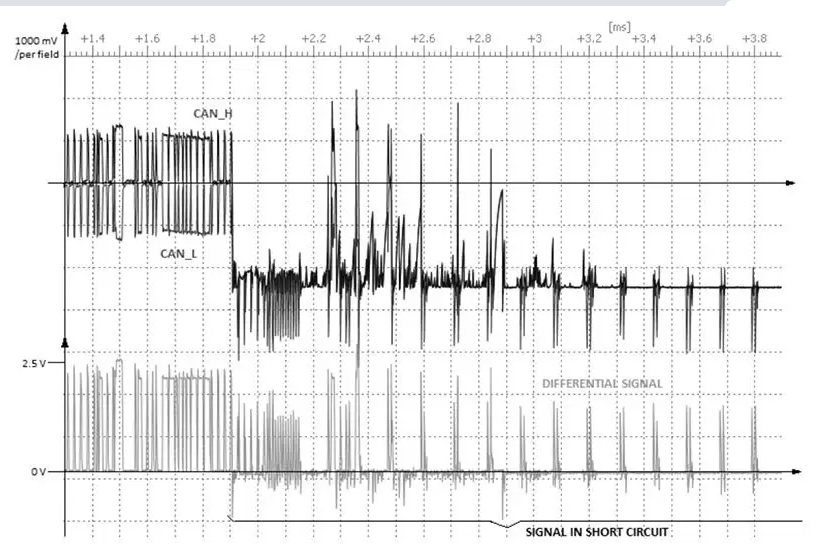
CAN Low cortocircuitado a masa/tierra
En este caso el cable CAN_L tiene un cortocircuito a masa, por lo que su voltaje es 0V. Se puede observar que está la señal de CAN_L. La señal en el bus de datos proviene del CAN_H, y por lo tanto la información no deja de enviarse, pero como puede verse sólo se transmite a través de un cable y de forma errática. (pincha en la imagen para hacerla más grande)
CAN_High cortocircuitado a masa/tierra
Cuando se cortocircuita a masa el cable CAN_H su señal, obviamente, desaparece, cae a 0V, como en el caso anterior de CAN_L a masa.
En el cable CAN_H aparecen señales picudas indicando un intento de continuar con la comunicación, pero en este caso, al contrario que cuando el CAN_L está a masa, la comunicación de la línea CAN Bus no es posible.
Las tensiones en ambos cables se encuentran reflejadas una con otra, para que la resta de ambas tensiones sea siempre un valor constante.
Este valor constante en la resta de señales de los cables del CAN Bus será 2V cuando se transmite información, 0V cuando no se transmite. Es decir:
UCAN_H – UCAN_L=2V ó 0V en condiciones normales.
UCAN_H sea 0V el valor de esa resta sería negativo. Y esto no lo permite el sistema.
5. Cortocircuito entre los cables CAN_H y CAN_L
Cuando se produce un cortocircuito entre ambos cables, el voltaje del valor será aproximadamente 2,5V. En la siguiente gráfica se produce el cortocircuito a los 45ms. y se muestra la resta de las señales de voltaje de CAN High y CAN Low es de 0V, 2,5-2,5V= 0V.
Cortocircuito de CAN High o CAN Low a positivo (+)
El valor del voltaje que se mostrará en el cable de corto a Positivo será el voltaje de 12 o 5V en cual se está haciendo corto y la información que se sigue transmitiendo se canaliza justamente en el cable en el que no se haya producido el corto.
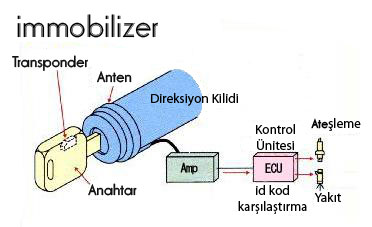
El propósito del sistema inmovilizador es proporcionar disuasión adicional contra robos en el vehículo en el que se instalado y para evitar que sea robado o conducido por usuarios no autorizados. La verificación de la autorización del usuario la realiza una llave de encendido con transpondedor integrado. El LED externo muestra el estado del inmovilizador y tiene una función adicional de disuasión de robos
Con la llave de encendido en ON, el transpondedor (un pequeño transmisor) integrado en la llave de encendido transmite su propio código encriptado a la antena de anillo a través de ondas de radio o la antena de llavero a través de ondas de radio. De acuerdo con el código cifrado enviado, la ECU del inmovilizador controla la ECU del motor o la ECU del motor sólo cuando el código cifrado enviado concuerda con el prerregistrado. El sistema está diseñado para que no requiera mantenimiento porque la fuente de alimentación para el transpondedor es suministrada por la ECU del inmovilizador. Se proporcionan tres llaves de encendido y se pueden registrar hasta ocho llaves en un vehículo según sea necesario. Se pueden registrar más de un billón de combinaciones de códigos encriptados, y partes de ellas se cambian de manera irregular cada vez que se enciende la llave de encendido. Esta función evita la copia de código, lo que aumenta la seguridad del sistema.
Para una llave válida, se enlaza la comunicación del mensaje de liberación con el ECM y los LED muestran la tecla válida del estado del inmovilizador Para el caso de que la llave no sea la correcta , La PCM desactiva el circuito del inyector de combustible con una intervención codificada y establece el DTC (Código de diagnóstico de avería).
Las condiciones anteriores se mantienen hasta que se apaga el encendido. Una PCM sin una unidad de control del inmovilizador no se puede intercambiar por una PCM que se utiliza con un sistema de unidad de control del inmovilizador. La unidad de control del inmovilizador y la PCM deben tener un código de identificación coincidente. La codificación de identificación y la codificación de teclas se logran mediante el uso de Scanner
Cada llave de encendido válida tiene un transpondedor de lectura / escritura. El transpondedor contiene una implementación de un algoritmo criptográfico con 96 bits de clave de seguridad configurable por el usuario contenida en EEPROM y transmite datos a la UCI modulando la amplitud campo electromagnético, y recibe datos y comandos de manera similar.
La función del sistema inmovilizador se comparte entre la IMMO y el ECM. Las tareas de la unidad de control electrónico del inmovilizador (IMMO) son:
Lectura de la información de entrada encendido ON / OFF
Control del LED de estados
Controlar el proceso de lectura / escritura del transpondedor (modulación, demodulación, decodificación, comparación del código de lectura con el código de las claves válidas).
Comunicación con el ECM después del encendido en ON (recepción de la solicitud del ECM y transmisión del mensaje de liberación).
Funciones especiales para el cálculo y manejo del código VIN
El código VIN lo calcula el inmovilizador mediante un generador aleatorio. El código VIN se transmite desde el inmovilizador en la comunicación del mensaje de liberación solo en caso de utilizar una llave autorizada. Sin una llave autorizada no es posible obtener el código VIN del sistema. En caso de que el estado interno del ECM esté en modo Virgen o en modo neutral, el ECM aprende el código VIN del sistema automáticamente después de recibir el primer mensaje de respuesta de liberación. Código VIN en inmovilizador y ECM, llave autorizada) Comunicación con el equipo de prueba DLC. Las funciones principales son el procedimiento de codificación de claves, el manejo del código VIN y el soporte para las funciones de prueba del sistema.
Componentes principales
Chip Transponder
Es alimentado por la ECU del inmovilizador. Cuando el transpondedor recibe datos de números aleatorios, los procesa junto con el código encriptado. Luego transmite el resultado del proceso a la ECU del inmovilizador.
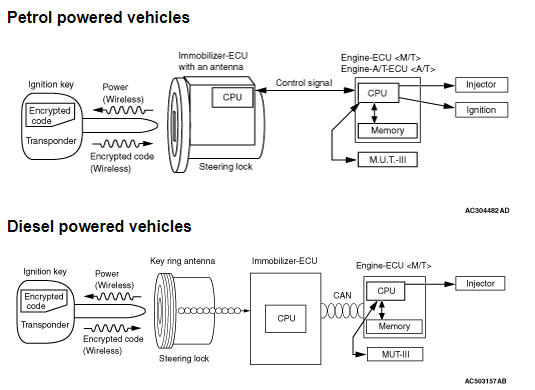
Inmovilizador-ECU con antena
Suministra energía eléctrica al transpondedor integrado en la llave de encendido y transmite datos numéricos aleatorios.
Verifica el código encriptado que se envía desde el transpondedor. Si el código es correcto, envía una señal de movilización del motor a la ECU del motor o la ECU del motor para arrancar el motor.
PCM/ECM Unidad de Control de Motor
Arranca el motor y luego continúa funcionando si se confirma una señal de movilización del motor. Si se confirma una señal de inmovilización del motor, la ECU cancela el control del motor y detiene el motor.
Antena de llave (incluye un amplificador) (Diesel)
La ECU del inmovilizador suministra energía a través de una antena en un bloqueo de dirección mediante la transmisión de ondas electromagnéticas a un transpondedor integrado en una llave, mediante acoplamiento magnético.
Realice la Limpieza completa del pistón o en su defecto coloque pistones nuevos para mejores resultados
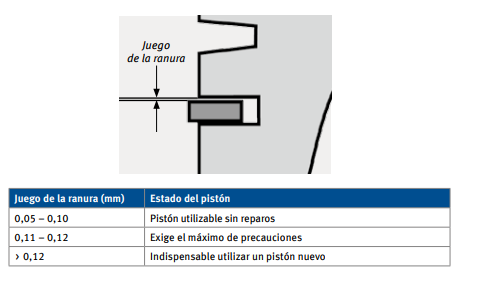
Paso 2: Comprobación de las ranuras del segmento
Cuando existe una separación de 0,12mm o más entre un segmento nuevo de compresión de flancos paralelos y el flanco de ranura correspondiente, esto significa que el pistón está excesivamente desgastado y hay que renovarlo.
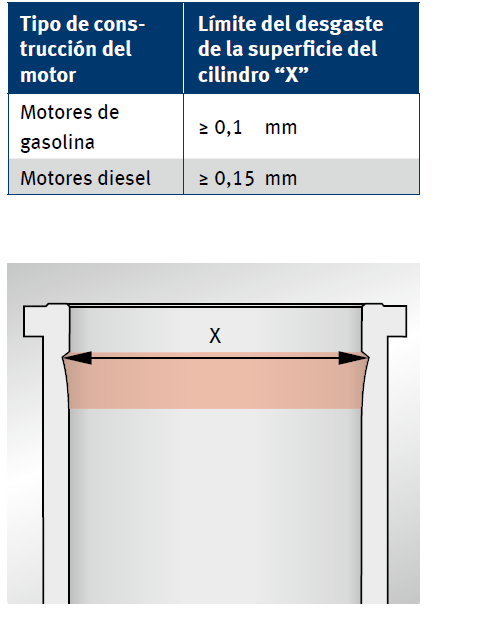
Paso 3: Comprobación del desgaste y limpieza cilindro
Cuando el desgaste del cilindro sea superior a 0,1 mm en motores de gasolina y a 0,15 mm en motores diésel, ha de renovarse también el cilindro (desgaste de la superficie deslizante del cilindro).
Este proceso es muy importante ya que si conservamos las mismas camisas de cilindro y no revisamos si existen deformaciones podremos tener problemas de hermeticidad de los segmentos y/o anillos del pistón,
El requisito esencial para que el pistón selle óptimamente es la geometría perfecta del cilindro. Los problemas de selladura de los segmentos de los pistones provienen de las divergencias
A su vez realice una limpieza del cilindro eliminando residuos de aceite carbonizado
Paso 4 Instalación de segmentos del piston
Al sustituir los segmentos del pistón se recomienda por regla general la sustitución del juego completo de segmentos La altura del segmento se controla con un pie de rey.
El diámetro puede comprobarse con un anillo de medición o un cilindro repasado; la holgura de las puntas de las junturas mediante una evaluación subjetiva o con un calibre de espesores. Cuando se comprueba el diámetro del segmento en cilindros/camisas de cilindro desgastados se debe prestar atención a que la holgura de las puntas de las junturas puede dar mayores valores.
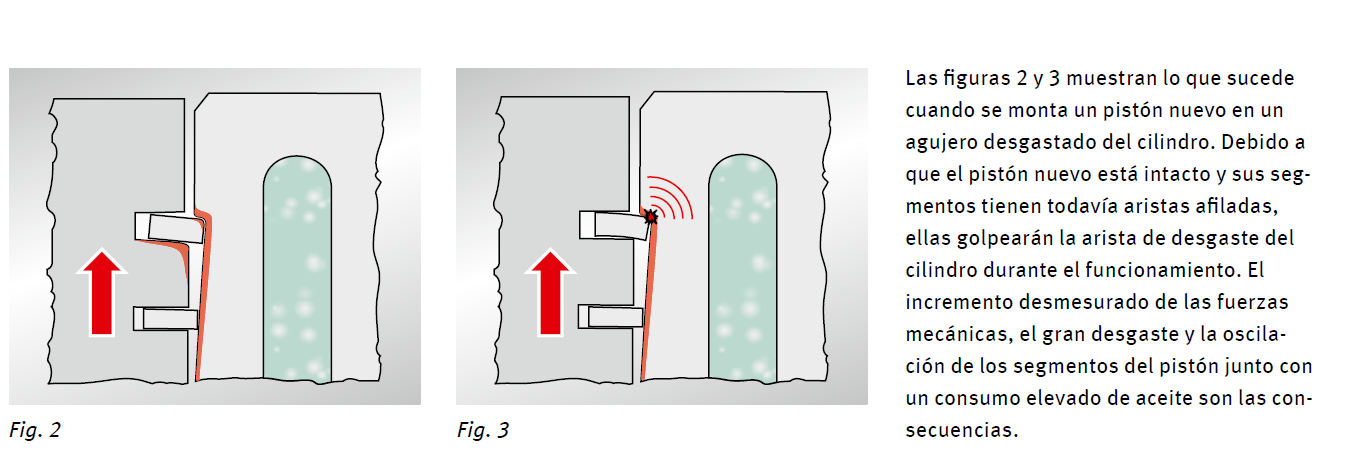
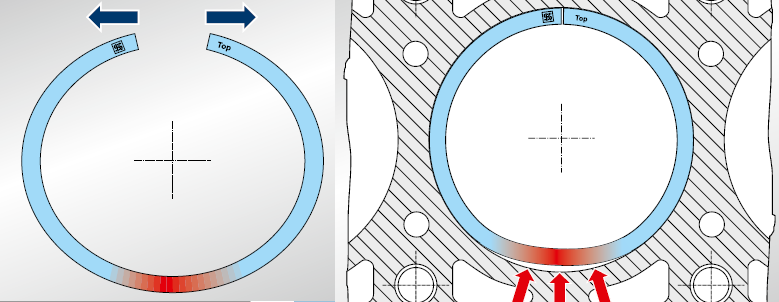
Los problemas y daños más graves que afectan a los segmentos de los pistones son causados durante el montaje. Los segmentos tienen entonces que soportar el máximo esfuerzo mecánico. El mal montaje repercute negativamente en la forma y en la distribución radial del segmento definidas durante la producción. En consecuencia, la selladura requerida no funcionará en absoluto o sólo lo hará parcialmente.
Un segmento debe ser expandido solamente hasta que el diámetro interior pueda rozar el diámetro exterior del pistón. Más expansión conduciría a la flexión del segmento sobre todo en su dorso de donde surgirían graves problemas cuando esté montado porque sellará mal.
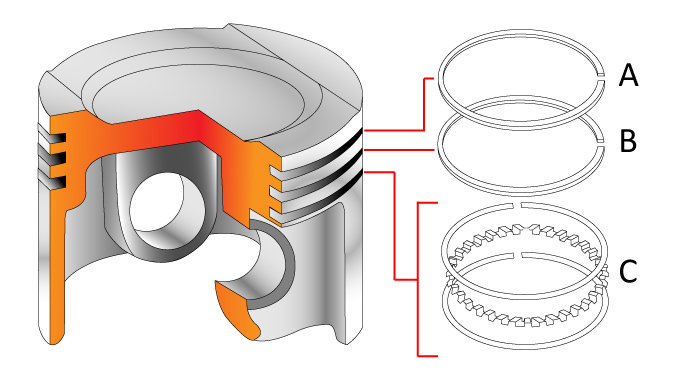
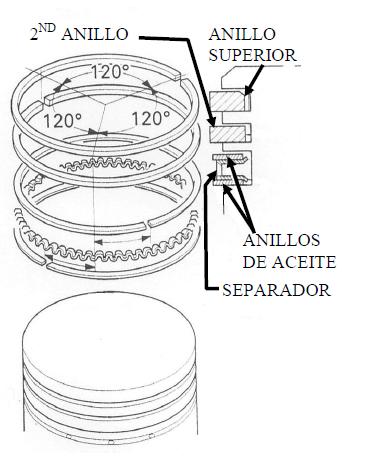
La correcta Posición de los Segmentos de pistón queda de la siguiente manera
Para el caso de los anillos de aceite, y específicamente en el separador se debe de montar de la siguiente manera, evitando problemas de superposición y a su vez un mal funcionamiento de este segmento
Utilice la Herramienta correcta para la instalación de anillos de pistón, este procedimiento puede ahorrarme mucho dinero y tiempo, un kit como el siguiente le puede ayudar en mucho
Paso 5 Libre rodamiento de los segmentos
Después del montaje se debe garantizar que los segmentos del pistón pueden moverse libremente. Girar las puntas de juntura de los segmentos en el pistón en 120° respectivamente.
Para reducir el consumo de combustible y de emisiones y para un incremento de la eficiencia, la tecnología del motor se optimiza cada vez más, y por eso también el sistema de encendido se tiene que optimizar empleando componentes más sencillos pero con mayor utilidad que genere una mejor corriente para que la mezcla de aire y combustible, realice el trabajo de explosión de una manera más eficaz y reduzca las emisiones contaminantes y a su vez se refleje en un mejor desempeño de potencia del vehículo
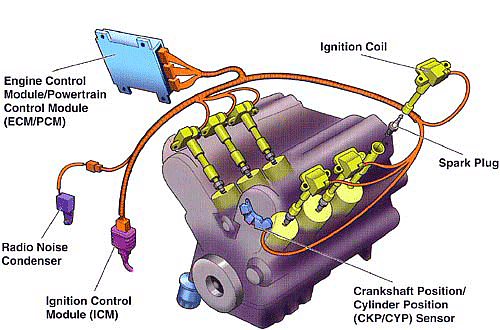
En el pasado, los sistemas de encendido utilizaban un sistema de distribución de chispas en el que un distribuidor distribuía el alto voltaje generado por una bobina de encendido a las bujías. Los motores de hoy cuentan con un sistema de encendido sin distribuidor, que entrega un alto voltaje directamente desde las bobinas de encendido a las bujías. Para motores con un sistema de encendido electrónico, crean un alto voltaje mediante el uso de una bobina con un encendedor (Stick Coil) que se monta directamente en las bujías de los cilindros.
Para conceptualizar mejor las bobinas de encendido revisaremos las más comunes en la industria automotriz
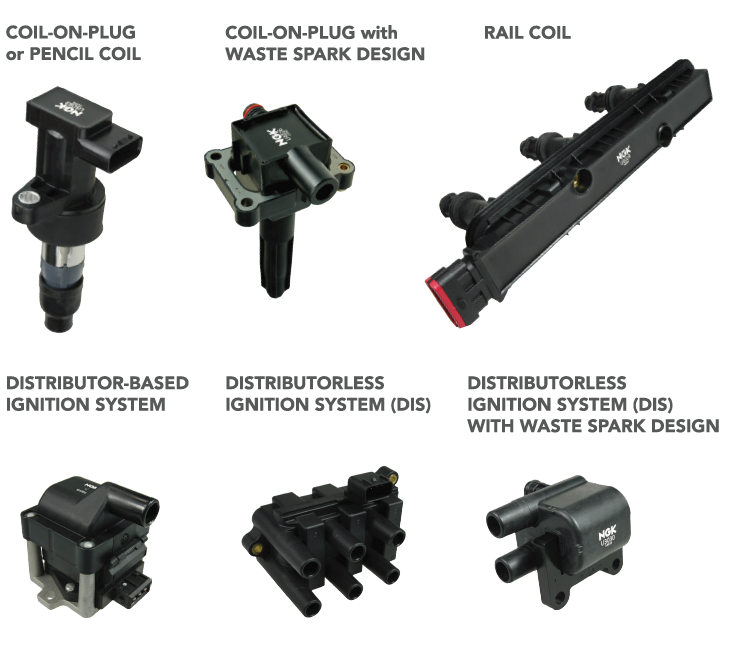
Tipos de Bobinas de encendido
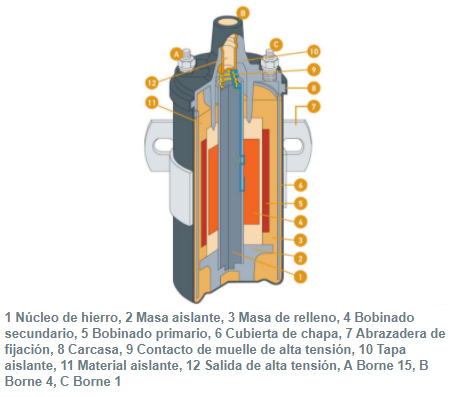
Bobina de encendido de cilindro
La composición estructural de las bobinas de encendido convencional realiza la tarea de inducir alta tensión partiendo de una baja tensión.
El núcleo de hierro fortalece el campo magnético generado en este núcleo de hierro se encuentra enrollado con un fino embobinado secundario. El embobinado secundario se compone principalmente por un hilo de cobre aislado, y sus características son de: Grosor aproximado de 0,05–0,1 mm, con 50.000 revoluciones.
El embobinado primario contiene un hilo de cobre lacado, de un grosor aproximado de 0,6–0,9 mm, y enrolla al embobinado secundario. La resistencia contiene aprox. 0,2–3,0 Ω y en el secundario en aprox. 5–20 kΩ. La secuencia de embobinado del primario al secundario asciende aprox. a 1:100.
El embobinado primario está unido al bobinado secundario mediante una conexión de embobinado con el borne 1. y se utiliza para facilitar la fabricación de la bobina. La corriente primaria que fluye a través del embobinado primario, este se conecta o desconecta mediante el ruptor de encendido. La resistencia de la bobina y la tensión aplicada al borne 15 determinan la cantidad de corriente. La canalización de la corriente desencadenada por el ruptor modifica el campo magnético en la bobina e induce un impulso de tensión que se transforma en impulso de alta tensión por medio del embobinado secundario. Mediante el cable de bujía, el impulso llega al arco eléctrico de la bujía para encender la mezcla de aire y combustible en un motor Otto.
La cantidad de alta tensión va en función de la velocidad del cambio de campo magnético, así como la cantidad de revoluciones de embobinados de la bobina secundaria y de la potencia del campo magnético. La tensión de inducción embobinado primario comprende entre 300 y 400 V. La alta tensión de la bobina de encendido puede comprender hasta 40 KV
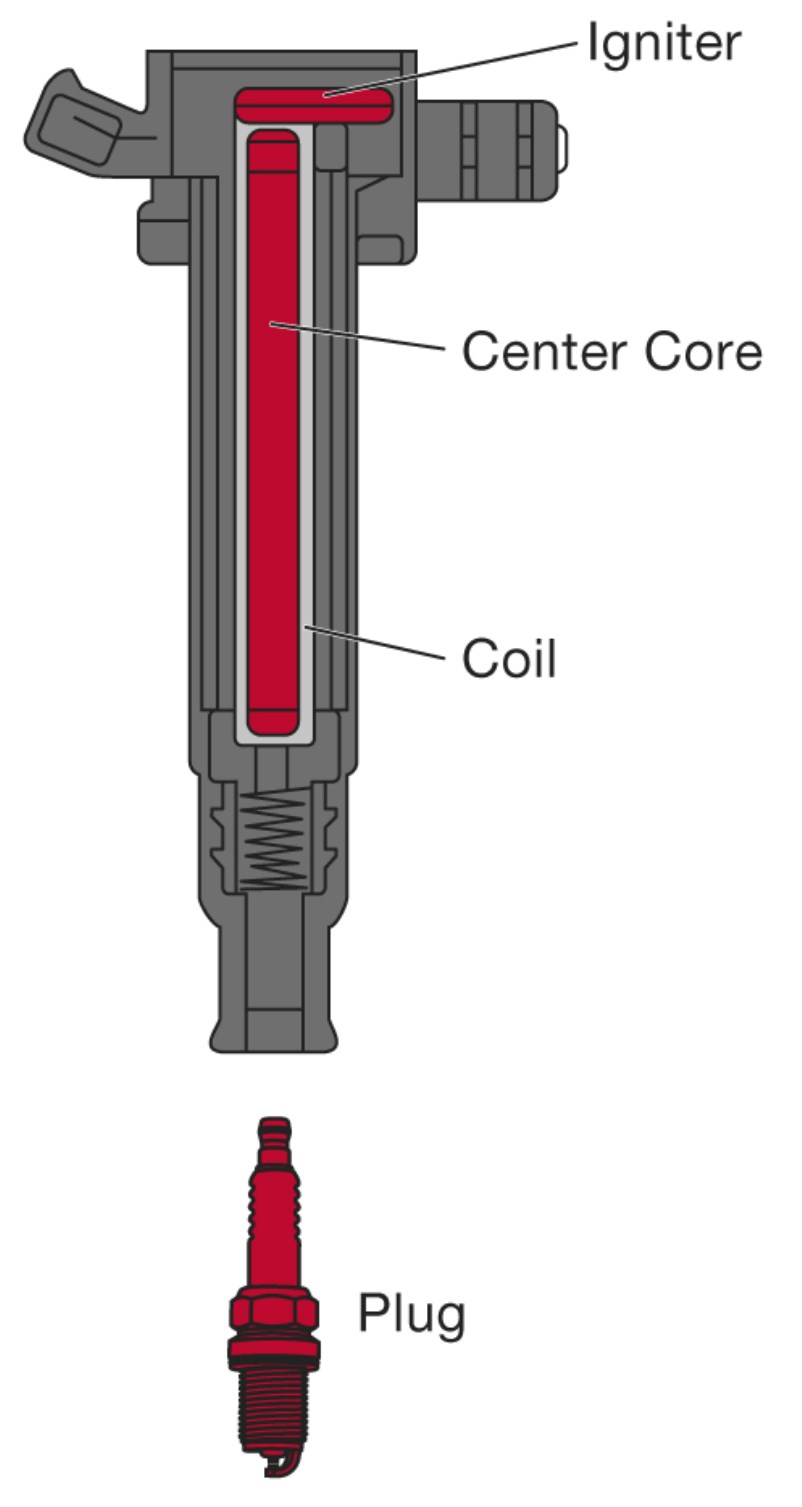
Bobina Independiente
Estas bobinas de encendido independiente, nos indica que es una bobina por cada bujía optimizando así la corriente adecuada sin problemas de distribución de esta en la bujía, es la más empleada últimamente en los vehículos gracias a que su mantenimiento es por cilindro y no un mantenimiento total de todas las bujías, y también tiene muchas otras características positivas tales como
Montado directamente en la bujía;
Diseñado para resistir la temperatura;
Materiales de alto valor para una relación óptima entre peso y volumen;
Con o sin módulo electrónico según el tipo de vehículo.
Riel de bobinas
Es una gran alternativa a las bobinas tipo lápiz o bobinas independientes de bujías: múltiples bobinas de encendido presentadas en una carcasa común con una sola conexión de enchufe compacto y con la ventaja de tener una instalación muy sencilla en el motor, aunque por otra parte una de sus desventajas es que su mantenimiento debe de ser total (reemplazo de esta pieza)
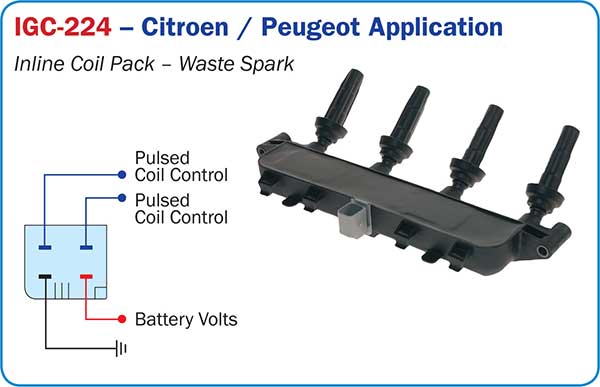
Paquete(Bloque) de bobinas
Para el caso de las bobinas de paquete, su funcionamiento es controlado por un paquete de bobinas que distribuye la corriente a las bujías mediante cables de bujías y presenta las siguientes características
Resistente a altas temperaturas;
Distribución estática de alto voltaje;
Bobinas de doble chispa con y sin módulos electrónicos integrados para vehículos de 4, 5 y 6 cilindros.
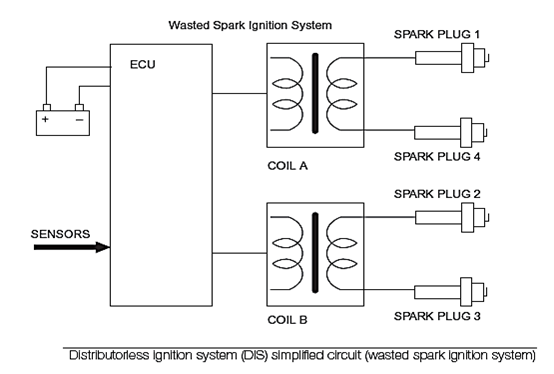
Bobinas de encendido con Módulo DIS
El sistema de encendido sin distribuidor (DIS) es el sistema de encendido en el que el distribuidor del sistema de encendido electrónico se reemplaza con el número de bobinas de inducción, es decir, una bobina por cilindro o una bobina por par de cilindros, y la sincronización de la chispa se controla mediante un Unidad de control de encendido (ICU) y la unidad de control del motor (ECU), lo que hace que este sistema sea más eficiente y preciso.
Debido al uso de múltiples bobinas de encendido que proporcionan voltaje directo a las bujías. este sistema también se conoce como sistema de encendido directo (DIS).
Cuando el interruptor de encendido está en ON, la corriente de las estadísticas de la batería fluirá a través del interruptor de encendido a la unidad de control eléctrico (que sigue procesando datos y calculando la sincronización) del vehículo que está conectado al módulo de encendido y las bobinas. montaje, (que hace y rompe el circuito).
Las ruedas de activación montadas en el árbol de levas y el cigüeñal tienen dientes igualmente espaciados con un espacio, y los sensores de posición que consisten en la bobina magnética que genera constantemente un campo magnético a medida que el árbol de levas y el cigüeñal giran.
Cuando estos espacios se encuentran frente a los sensores de posicionamiento, se produce una fluctuación en el campo magnético y las señales de ambos sensores se envían al módulo de encendido que a su vez detecta las señales y la corriente deja de fluir en el devanado primario de las bobinas. y cuando estos huecos se alejan de los sensores, las señales de ambos sensores se envían al módulo de encendido que enciende la corriente para fluir en el devanado primario de las bobinas.
Esta conexión y desconexión continua de las señales genera un campo magnético en las bobinas que a su vez induce EMF en el devanado secundario de las bobinas y aumenta el voltaje hasta 70000 voltios.
Este alto voltaje se envía luego a las bujías y se produce la generación de chispas.
La sincronización de las bujías es controlada por una unidad de control electrónico procesando continuamente los datos recibidos del módulo de control de encendido.
En el sistema de Airbag y Sistema de Ocupación de asientos es indispensable tener censado correctamente si una persona esta o no en el asiento, es por ello que se explicará para qué nos sirve el sensor de peso de asiento, que en términos breves determina el peso del ocupante mediante un juego de resistencias para activar el asiento ocupado y así activar las bolsas de aire en caso de una colisión . Si el sensor de ocupación del asiento en el lado del acompañante queda sometido a un peso superior a aprox. 5 kg, la unidad de control para airbag detecta «asiento ocupado».
Al no estar ocupado el asiento del acompañante, el sensor tiene una alta resistencia. En cuanto se ocupa la plaza, la resistencia disminuye. Si la resistencia aumenta a más de 480 ohmios, la unidad de control para airbag detecta una interrupción e inscribe una avería en la memoria. La unidad de control para airbag emplea la información del sensor de detección de ocupación del asiento y del conmutador en el cierre del cinturón para detectar el uso del cinturón.
Un sensor de peso del asiento para detectar el peso de un ocupante del asiento. El sensor de peso tiene una caja montada entre una base de asiento y un miembro de asiento. Una o más resistencias de galgas extensométricas están montadas en la caja.
Las resistencias generan una señal eléctrica en respuesta a la tensión de la carcasa por el peso del ocupante del asiento. La señal eléctrica cambia en función del peso del ocupante. Un sujetador pasa a través del miembro de asiento, la caja y la base del asiento.
El sujetador asegura el sensor entre la base del asiento y el miembro del asiento. La carcasa está adaptada para transferir a la resistencia de banda extensométrica el peso del ocupante hasta un nivel predeterminado. La caja evita que la galga extensométrica reciba un peso más allá del nivel predeterminado de modo que el sensor no se dañe por una carga excesiva. La carcasa también permite que el sensor de peso sea insensible a las fuerzas fuera del eje que de otro modo podrían contribuir a lecturas de peso inexactas.
Los sensores de peso se han convertido en la forma más común de detectar a un ocupante; sin embargo, los fabricantes de automóviles están experimentando con formas nuevas y posiblemente más efectivas de detectar quién o qué está armado. Algunos sistemas experimentales toman imágenes ópticas de los pasajeros para determinar si un niño o un adulto está sentado en el asiento y utilizan esa información para activar o desactivar las bolsas de aire según corresponda.
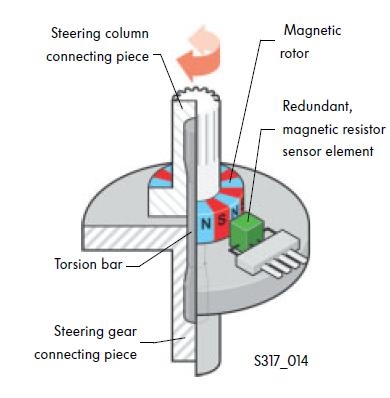
En el Programa de control de estabilidad electrónica EPS se necesita un sensor de par y ángulo de dirección, que detecta los pares de rotación aplicados a la barra de torsión del eje de dirección junto con los ángulos de dirección (ángulo de rotación) en el momento de la dirección, y posteriormente introduce estas señales de par y ángulo, con el fin de determinar la salida de control, en la unidad de control electrónico (ECU) que controla la fuerza de rotación del motor de asistencia. El ángulo de dirección y el sensor de par que se informa aquí ha sido diseñado y desarrollado en este contexto.
El sensor de par en el sistema de dirección asistida eléctrica mide el par que el conductor aplica al volante. A partir de estos datos, la centralita electrónica calcula la asistencia a la dirección que debe aplicar el motor eléctrico.
Un sistema de dirección asistida es fundamentalmente un servo de par, . El sistema debe determinar cuánto torque está aplicando el conductor al volante y posteriormente la ECU de la dirección añada un cantidad de asistencia para mantener el torque aplicado por el conductor en el valor requerido. El conductor completa el circuito de control de posición general, operando el volante hasta que el se logra la trayectoria deseada del auto.
A pesar de esto, los sensores de posición también pueden ser necesarios en un sistema EPS para determinar la posición de la columna de dirección («ángulo de dirección») para autocentrado activo y amortiguación. La señal del ángulo de dirección también se puede emplear por otros sistemas en el vehículo, como sistemas de control de deslizamiento y sistemas de control de la dirección de los faros. Sin embargo, es perfectamente posible hacer un EPS básico con un sensor de par.
Una parte importante del diseño de un sistema EPS es elegir la tecnología de sensor de par más adecuada para la aplicación. Aunque aparentemente simple a primera vista, El par es en realidad uno de los parámetros físicos más difíciles de medir. Se han instalado muchos sensores de par propuestos a lo largo de los años, y se siguen inventando. Sin embargo, solo unos pocos se han diseñado con éxito en productos de bajo costo para la fabricación de grandes volúmenes.
Parámetros
0,015 Nm es la resolución con la que la ECU puede calcular el ángulo de dirección sobre la base de los datos del sensor del sensor de par.
−40 ° C hasta +125 ° C es el rango de temperatura en el que el sensor de par del sistema de dirección asistida eléctrica funciona de forma absolutamente fiable.
El sensor se encuentra en el piñón de dirección. En el eje de entrada se monta una rueda polar, que se conecta al piñón de dirección mediante la barra de torsión. Cuando el conductor aplica torque al volante, se gira la barra de torsión y, a su vez, el imán en relación con el sensor. El sensor consta de elementos magnetorresistivos cuya resistencia cambia a medida que cambia la dirección del campo. El rango de medición del sensor cubre +/− 10 Nm. Un limitador de ángulo mecánico evita que la barra de torsión se sobrecargue cuando se aplican pares de dirección más altos.
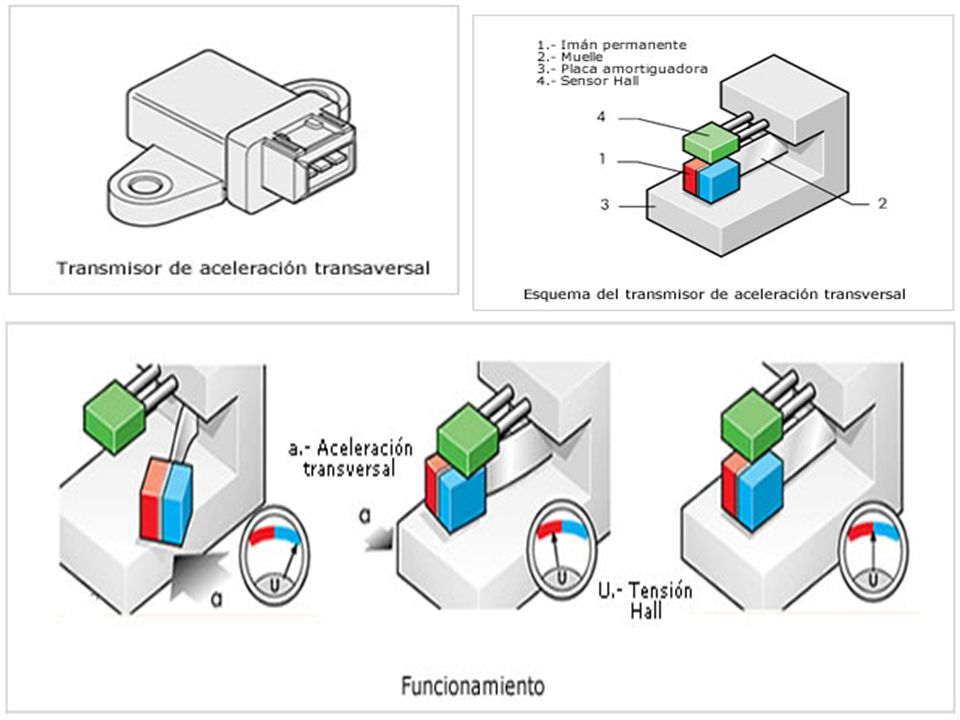
El trabajo de este sensor integrado al ESP, es detectar fuerzas laterales del vehículo y la intensidad de las mismas, siendo estas las que empujan al vehículo fuera de su trayectoria prevista.
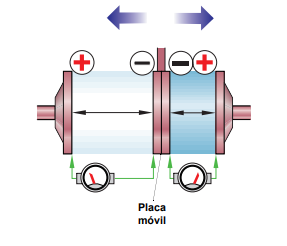
Está situado bajo la columna de dirección, en el lado del túnel de la transmisión. Tiene la misión de detectar la aceleración transversal del vehículo, o lo que es lo mismo, la fuerza de guiado lateral de las ruedas, por lo que debe respetarse su posición para evitar la medición de otras aceleraciones. Internamente consta de dos condensadores situados uno detrás de otro, y una electrónica de control que analiza la capacidad de los condensadores, transformándola en una tensión.
Para funcionar correctamente necesita que la unidad de control lo alimente con 5 V y masa. Según sea la aceleración detectada envía a la unidad de control una tensión entre 0 y 5 V. Si el valor es de 2’5 V, indica que no hay aceleraciones.
El transmisor de aceleración transversal trabaja según un principio capacitivo. Es decir, la placa o armadura central compartida por ambos condensadores es móvil y se desplaza en función de la aceleración transversal existente.
Cuando no hay aceleración transversal, la placa intermedia permanece en reposo, siendo constante la distancia entre las placas e iguales las capacidades de ambos condensadores. En el instante que interviene alguna aceleración transversal, la distancia entre placas se modifica, variando las capacidades y la tensión de la señal de salida.
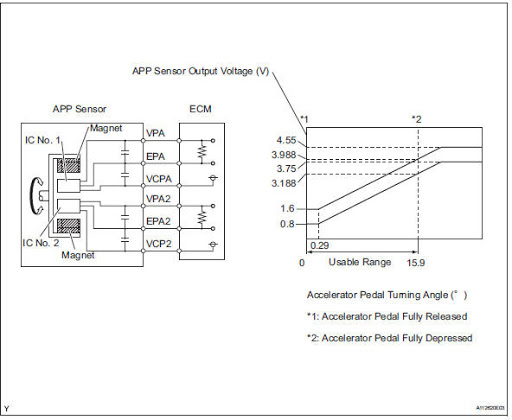
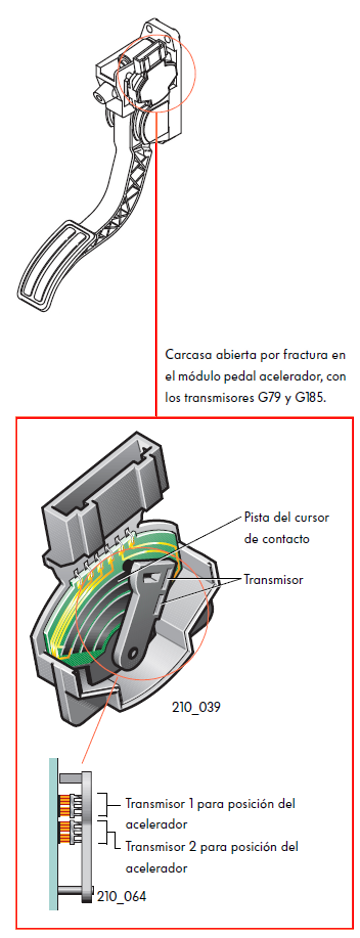
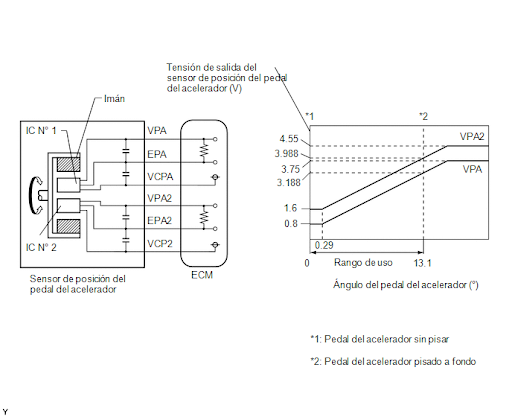
El sensor APP (Accelerator Pedal Position) o sensor de posición de pedal de acelerador es el encargado de comunicarle a la ECU de motor en qué posición de pisado se encuentra el pedal para hacer la correlación con el sensor TPS . La mayoría de los sensores de posición del pedal de aceleración están equipados con dos potenciómetros para aumentar la confiabilidad. Cada potenciómetro tiene su propia fuente de alimentación desde la ECU, lo que significa que el número de conexiones puede ser de hasta 6 pines . El potenciómetro contiene una pista de carbono conectada a la fuente de alimentación en un extremo y tierra en el otro. Un control deslizante conectado mecánicamente al pedal del acelerador se desliza sobre la pista de carbono recogiendo el voltaje del sensor.
Si el sensor contiene dos potenciómetros, la fuente de alimentación generalmente se conecta al revés al segundo potenciómetro. Cuando se mueve el pedal de aceleración, el voltaje de la señal de un potenciómetro aumenta mientras que el otro disminuye. El sensor de posición del pedal de aceleración en este ejemplo de medición también contiene dos potenciómetros, pero ambos están conectados de la misma manera. Como resultado, ambas señales son iguales excepto por un desplazamiento diferente.
La información de la posición del acelerador se transfiere al módulo de control del actuador del acelerador (TAC) y al módulo de control del tren motriz (PCM). El sensor de posición del acelerador se compone de dos sensores individuales, con ambos sensores diseñados para tener cableado de retorno de sensor individual. Cada sensor tiene un rango de voltaje variable.
El sistema PCM recibe y procesa las señales eléctricas de los sensores ACC, junto con las señales del motor de corriente continua (CC), que establece la placa del acelerador a través de un cable del acelerador. Cuando el conductor presiona el pedal del acelerador, la presión hace girar la placa del acelerador dentro del cuerpo del acelerador, lo que abre un pasaje dentro de esta unidad para permitir el flujo de aire. A medida que el aire viaja a través del paso del acelerador hacia el colector de admisión, activa los sensores de flujo de aire que manipulan la unidad de control del motor y empujan el combustible hacia el sistema de inyección de fluido.
El sensor que compone la unidad de sensor de APP se llama potenciómetro (montado en el pedal del acelerador). En algunos sensores, también hay un segundo y tercer sensor para componer la unidad de sensor de APP. En términos de un sistema jerárquico, el primer sensor es la entrada principal para acelerar a fondo. Si hay una discrepancia entre la señal de voltaje de salida de los potenciómetros que monitorean la posición del pedal o el sensor en sí, la unidad PCM reducirá el rendimiento del vehículo, configurando así la unidad APP en un ‘modo de emergencia’.
Las señales generadas por cada uno de los potenciómetros son diferentes. Mientras que uno de los potenciómetros transmitirá una señal de voltaje (que varía entre 0 y 5 voltios) a la unidad PCM sobre la posición del pedal, el segundo y tercer sensor se comportan como una unidad de respaldo. Durante el movimiento de un vehículo, la unidad PCM está comparando continuamente la salida de los tres potenciómetros del sistema de sensor de APP.
La falla del sensor de la aplicación será el resultado más común de la exposición continua a altos niveles de calor debido a su ubicación en la tabla del piso, que se encuentra junto al cortafuegos del vehículo. Aunque los sensores de APP normalmente mantendrán una funcionalidad adecuada durante la vida útil del vehículo, ocasionalmente será necesario reemplazarlo. Los sensores alternativos para la aplicación que han demostrado mostrar propiedades y funciones similares incluyen sensores resistivos, magnéticos e inductivos.
En la actualidad la seguridad de los ocupantes es muy importante, es por ello que se ha implementado una serie de sistemas como el ESP «Elektronisches Stabilitäts Programm» (Programa Electrónico de Estabilidad) que como su nombre lo dice busca evitar una volcadura y generar lesione graves o la muerte a sus ocupantes . Desde 2014, todos los vehículos vendidos en Europa debe tener un sistema ESP, ya que se ha demostrado ampliamente que salva vidas en accidentes de tráfico. La investigación realizada en el Reino Unido indica que las posibilidades de verse involucrado en un accidente fatal se reducen en un 25% con ESP.
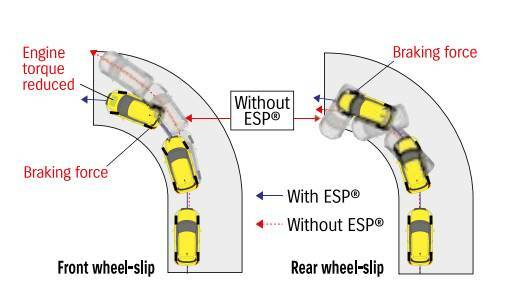
El Programa de Estabilidad Electrónica está diseñado para mejorar la estabilidad de un vehículo detectando y reduciendo la pérdida de tracción, lo que evita que los neumáticos derrapen y pierda el control el conductor. cuando el ESP detecta una pérdida de control de la dirección, aplica automáticamente frenos individuales para ayudar a «dirigir» el vehículo hacia donde el conductor pretendía dirigir el vehículo
El ESP se conoce alternativamente como Control electrónico de estabilidad (o ESC para abreviar). Otros términos alternativos que se usan a veces incluyen Programa de estabilización electrónica, Control dinámico del vehículo (VDC), Asistencia de estabilidad del vehículo (VSA) y Control dinámico de estabilidad (DSC), pero todos abarcan los mismos principios y tecnologías.
Funcionamiento
El ESP incluye varias piezas de tecnología que trabajan juntas para mantener el automóvil en la carretera de manera segura, en control y en la dirección deseada. Estos términos generales incluyen frenos antibloqueo (ABS) y control de tracción.
A medida que conduce, acelera y frena, numerosos sensores monitorean el comportamiento del automóvil y envían datos a una computadora central. Luego, esta computadora compara lo que estás haciendo con la respuesta del automóvil. Si, por ejemplo, está conduciendo bruscamente hacia la izquierda o hacia la derecha, pero el automóvil avanza en línea recta (tal vez porque la carretera está muy mojada o helada), la computadora puede reconocer esto e indicar a los sistemas del automóvil que intervengan y ayuda. Luego, se aplicarán frenos individuales a cada rueda para compensar y devolver al automóvil a una condición más estable. Esta tecnología es mucho más rápida de reaccionar de lo que sería un humano, lo que significa que el Programa de Estabilidad Electrónica puede ayudar a prevenir derrapes, frenadas de emergencia y accidentes.
En caso de subviraje, el ESC puede desacelerar la rueda trasera interior. Al mismo tiempo, el ESC puede reducir la potencia del motor hasta que el automóvil se haya estabilizado nuevamente.
Este sistema tiene la función de asistir al conductor en situaciones extremas, como el cruce repentino de un obstáculo (un animal, por ejemplo). También sirve para compensar reacciones excesivas del conductor y contribuye a evitar situaciones en las que el vehículo pueda perder estabilidad. Sin embargo, el ESP tiene sus limitaciones y no está en condiciones de vulnerar las leyes de la física.
El control de estabilidad es un elemento de seguridad activa del automóvil que actúa frenando individualmente las ruedas en situaciones de riesgo para evitar derrapes. Centraliza las funciones de los sistemas ABS (Antilock Braking System o Sistema Antibloqueo de Frenos) EBD (Electronic Brakeforce Distribution o Distribución Electrónica de la Frenada) y de Control de Tracción.
El ESP recibe otros nombres, dependiendo del fabricante del vehículo, siendo los más conocidos VDC (control dinámico del vehículo), DSC (control dinámico de estabilidad), ESC (control electrónico de estabilidad) y VSC (control de estabilidad del vehículo), si bien su funcionamiento es el mismo.
El sistema consta de una unidad de control electrónico, un grupo hidráulico y un conjunto de sensores:
Sensor de ángulo de dirección: está ubicado en la dirección y proporciona información constante sobre el movimiento del volante, es decir, la dirección deseada por el conductor.
Sensor de velocidad de giro de rueda: son los mismos del ABS e informan sobre el comportamiento de las mismas (si están bloqueadas, si patinan …)
Sensor de ángulo de giro y aceleración transversal: proporciona información sobre desplazamientos del vehículo alrededor de su eje vertical, desplazamientos y fuerzas laterales, es decir, cuál es el comportamiento real del vehículo y si está comenzando a derrapar y desviándose de la trayectoria deseada por el conductor.
El ESP está siempre activo. Un microordenador controla las señales provenientes de los sensores del ESP y las chequea 25 veces por segundo para comprobar que la dirección que desea el conductor a través del volante se corresponde con la dirección real en la que se está moviendo el vehículo. Si el vehículo se mueve en una dirección diferente, el ESP detecta la situación crítica y reacciona inmediatamente, independientemente del conductor. Utiliza el sistema de frenos del vehículo para estabilizarlo. Con estas intervenciones selectivas de los frenos, el ESP genera la fuerza contraria deseada para que el vehículo pueda reaccionar según las maniobras del conductor.
El ESP no sólo inicia la intervención de los frenos, también puede reducir el par motor para reducir la velocidad del vehículo; de ésta manera el coche se mantiene seguro y estable, dentro siempre de los límites de la física.
Aditamentos al ESP
El control de estabilidad puede tener multitud de funciones adicionales:
«Hill Hold Control» o control de ascenso de pendientes, sistema que evita que el vehículo retroceda al reanudar la marcha en una pendiente.
«BSW», secado de los discos de freno.
«Overboost», compensación de la presión cuando el líquido de frenos está sobrecalentado.
«Trailer Sway Mitigation», mejora la estabilidad cuando se lleva un remolque, evitando el efecto «tijera».
«Load Adaptive Control» (LAC), que permite conocer la posición y el volumen de la carga en un vehículo industrial ligero. Con esta función se evita un posible vuelco por la pérdida de la estabilidad. También se le denomina Adaptive ESP para la gama de vehículos de Mercedes. Está de serie en la Mercedes-Benz Sprinter y en la Volkswagen Crafter.
En los vehículos del grupo VAG (Volkswagen, Audi, Seat, Skoda etc. podemos encontrar una luz de EPC (Electronic Power Control) por sus siglas en inglés que indica un problema en el sistema electrónico de control del motor. Puede ser un problema en el pedal del acelerador, en el cuerpo de aceleración, en el sistema de control de tracción, o en algún componente electrónico de todo este sistema. Incluso un foco de freno quemado puede causar el encendido de esta luz.
La luz de advertencia EPC Volkswagen, también conocida como luz de advertencia del control electrónico de potencia, es un indicador que señala problemas con el sistema de aceleración de su Volkswagen. Esto podría significar que el pedal del acelerador, el cuerpo del acelerador, el control de tracción o la unidad de control de crucero necesitan atención. Sin embargo, en algunas circunstancias, la luz EPC de un Volkswagen también puede indicar otros problemas con su vehículo Volkswagen que hacen imposible arriesgar el tráfico en West Des Moines. Es por eso que nunca querrá ignorar los modelos VW Jetta de luz EPC y los otros vehículos de la línea están equipados. Las luces EPC VW Jetta generalmente requieren la atención de un experto en automoción.
El sistema de control electrónico de potencia está controlado por la unidad de control de freno, la unidad de control de dirección y la unidad de control del motor. Por ejemplo, si la unidad de control del motor no funciona correctamente, el rendimiento y la eficiencia del combustible de su vehículo pueden disminuir drásticamente. Es posible que vea que la luz Volkswagen EPC se enciende además de otras luces de advertencia. Esto se debe a que está integrado con varios otros sistemas en su vehículo. Es por eso que puede ser difícil diagnosticar el problema cuando la luz EPC Volkswagen está encendida.
Las causas más comunes de una luz EPC en su Audi o VW son un cuerpo del acelerador defectuoso, un sensor ABS defectuoso, un anillo ABS o un interruptor del pedal de freno defectuoso.
Aquí hay una lista más detallada de las posibles causas del EPC Light.
Fallo del cuerpo del aceleración
Sensor ABS defectuoso: común en los VW Passat más nuevos
Interruptor del pedal de freno defectuoso: problema común en Golf 4 y Fabia Skoda
Interruptor de luz de freno averiada
Cableado del sensor ABS defectuoso
Un sensor de presión de freno fallado (dentro del módulo ABS)
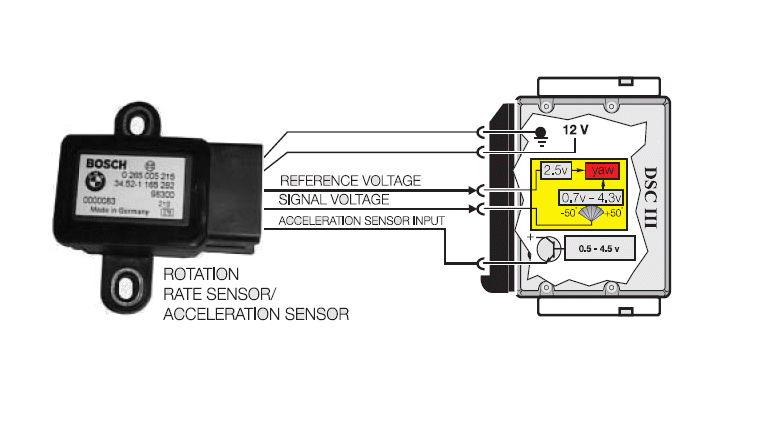
El sensor Yaw Rate que en español significa Sensor de Velocidad Rotacional mide la velocidad angular de un vehículo sobre su eje vertical en grados o radianes por segundo, a fin de determinar la orientación del vehículo a medida que sufre un giro brusco con el fin de evitar una volcadura
En términos más simples, este sensor es un componente clave en el control de estabilidad del vehículo ESP. La velocidad rotacional se puede definir como el movimiento de un objeto que gira sobre su eje vertical. El sensor de velocidad rotacional o yaw rate determina la distancia fuera del eje de un vehiculo que en otras palabras es la inclinación del vehículo cuando esta girando usando giroscopios para controlar el ángulo de deslizamiento, el ángulo entre la dirección del vehículo y el movimiento real de la curva.
Funcionamiento
El sensor determina qué tan lejos del eje se «inclina» un automóvil en un giro usando giroscopios para monitorear el ángulo de deslizamiento, el ángulo entre el rumbo del vehículo y la dirección real del movimiento. Esta información luego se alimenta al computadora del vehículo para evaluar la velocidad de la rueda, el ángulo de dirección y la posición del acelerador y, si el sistema detecta demasiada guiñada, se aplica automáticamente la fuerza de frenado adecuada
Al comparar el valor de yaw rate real del vehículo con la tasa de yaw rate objetivo, la computadora de a bordo puede identificar en qué grado el vehículo puede estar subvirando o sobrevirando, y qué acción correctiva, si corresponde, se requiere. La acción correctiva puede incluir reducir la potencia del motor y aplicar el freno en uno o más ruedas para realinear el vehículo.
Comparando el índice Yaw real del vehículo con el índice Yaw objetivo, la computadora de a bordo puede identificar en qué grado está sobre o subgirado y cuál es la medida correctiva a implementar, si fuera necesario. La medida correctiva puede incluir reducir la potencia del motor así como aplicar el freno en una o más ruedas para realinear el vehículo.
Ubicación
El sensor de velocidad de guiñada generalmente se encuentra debajo del asiento del conductor o del pasajero, montado en el nivel piso para acceder al centro de gravedad del vehículo.
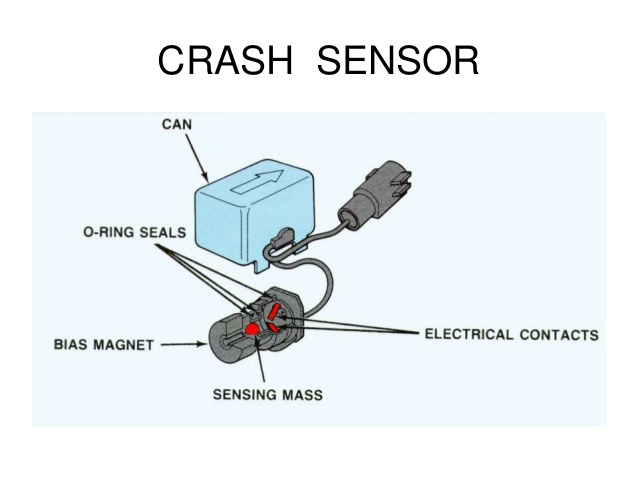
Los sensores de colisión necesitan detectar una colisión y convertirla en señales que se emplean en milisegundos. Las fuerzas de aceleración que actúan sobre los sensores después de una colisión pueden alcanzar los 100 g (100 veces la fuerza gravitacional de la Tierra). Cuando un automóvil se detiene abruptamente por un impacto, todos los cuerpos u objetos que no estén firmemente sujetos al automóvil continuarán moviéndose a la velocidad del impacto. Los sensores miden esta aceleración y la transmiten a la unidad de control como datos utilizables.
Estas señales van conectadas a una red CAN de alta velocidad por el tiempo de respuesta que debe de tener el airbag y así accionar las bolsas de aire y proteger al conductor de lesiones graves o incluso la muerte, mas sin embargo lo que se puede definir que a lo largo de los años se han ido desarrollando más y mejores sensores los cuales para algunos conductores llegan a ser problemáticos porque con colisiones pequeñas activan las bolsas de aire, pero esto es con el fin de proteger más y mejor a los conductores
Dependiendo del sistema de airbag y del número de airbags instalados, los sensores de choque o de aceleración se instalan directamente en la unidad de control o como satélites en la parte delantera del vehículo o en el lateral del vehículo.
Los sensores frontales siempre se proporcionan por duplicado. Estos sensores generalmente operan de acuerdo con el sistema de masa de resorte. Con este sistema, el sensor aloja un rodillo ponderado que se llena con pesos estandarizados. Una bisagra de resorte de bronce se enrolla alrededor del rodillo con peso y sus extremos se unen al rodillo con peso y al alojamiento del sensor. Como resultado, el rodillo con peso solo puede moverse si la fuerza se aplica desde una determinada dirección. Si se aplica fuerza, el rodillo ponderado rueda contra la fuerza del resorte de bronce y cierra el circuito a la unidad de control mediante un contacto. El sensor también alberga una resistencia de alta impedancia para ejecutar autodiagnósticos.
Componentes Principales
Tipo de Sensor
Tiempo de respuesta
Ventajas
Desventajas
Sensor de Aceleración
15-50ms
-Rígido -Bajo costo
-Mayor tiempo de respuesta
SBS
10-30ms
-Rápido en algunas colisiones -Mejor selección entre choque grave o leve
-Diferentes configuraciones de autos tienen diferentes SBS
Manguera de presión
10-15
-Bajo costo -Menor tiempo de respuesta
-Agujeros o bloqueos impiden su función
Comparación de diferentes sensores utilizados en los choque frontales
Los sensores de colisión recopilan los datos necesarios para tomar decisiones sobre el despliegue de la bolsa de aire.
Los sensores de choque miden la rapidez con la que un vehículo reduce la velocidad en un choque frontal o acelera hacia un lado en un choque de impacto lateral. Algunos vehículos están equipados con un sistema de detección diseñado para detectar el inicio de un choque por vuelco.
Los sensores de choque frontales pueden estar ubicados en la parte delantera del vehículo cerca del motor, en el compartimiento de pasajeros o, a veces, en la unidad de control electrónico (ECU).
Los sensores de impacto lateral pueden estar ubicados en la ECU, la puerta, el umbral de la puerta o entre las puertas delantera y trasera.
Los sensores de colisión de vuelco pueden estar ubicados en la ECU o en el centro de gravedad del vehículo.
El frenado severo o de pánico por sí solo no puede hacer que se despliegue una bolsa de aire; Las bolsas de aire se despliegan solo en choques.
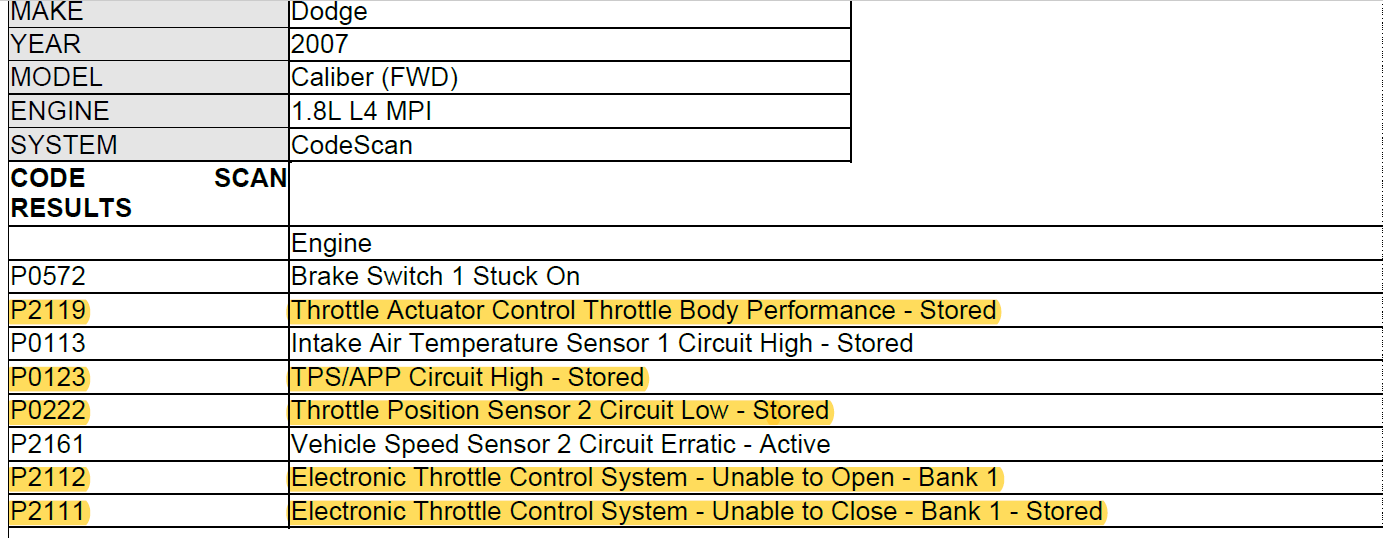
Luz de advertencia del control electrónico del acelerador (ETC)
En los vehículos de grupo Chrysler Dodge y Jeep, principalmente en vehículos con motores 2.4L , 2.0L, Y 1.8L con 4 Cilindros que principalmente son Avenger, Jorney, Compass, Patriot y Caliber como los principales con problemas encontramos Esta luz que nos informa de un problema con el sistema de control electrónico de la Garganta (ETC)/Cuerpo de acelerador (Garganta).
Si se detecta un problema mientras el vehículo está en marcha, la luz permanecerá encendida o parpadeará según la naturaleza del problema. Encienda y apague el vehículo cuando el vehículo esté completamente detenido y de manera segura y la transmisión esté en la posición PARK. La luz debería apagarse. Si la luz permanece encendida con el vehículo en funcionamiento, su vehículo generalmente se podrá conducir pero con principales problemas como pérdida de potencia así como problemas de que el vehículo se apague
Si la luz continúa parpadeando cuando el vehículo está funcionando, se requiere un servicio inmediato y es posible que experimente un rendimiento reducido y que su vehículo deba remolcarse. La luz se encenderá cuando el encendido se coloque en la posición ON / RUN y permanecerá encendida brevemente como verificación de la bombilla. Si la luz no se enciende durante el arranque.
Funcionaiento
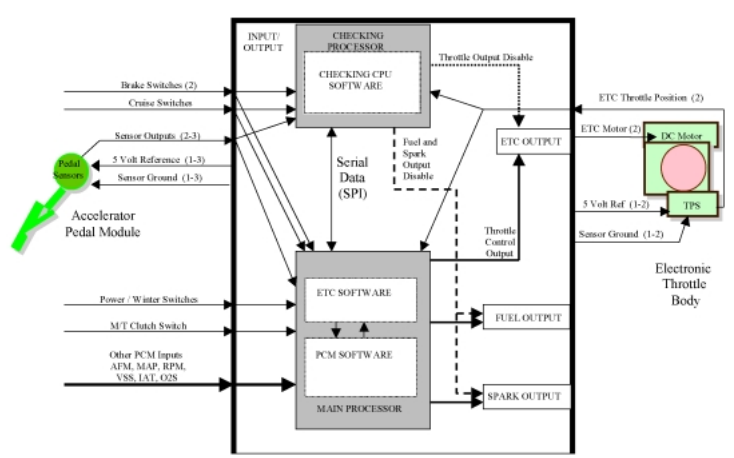
Cuando un componente se controla electrónicamente en lugar de mecánicamente, el término para describir ese control es drive-by-wire. Eso es porque las señales que controlan la operación se envían electrónicamente, a través de un cable. Los aviones utilizan la tecnología drive-by-wire ampliamente en todo el avión. Pero su aplicación en automóviles es relativamente nueva en comparación.
Con un cuerpo de acelerador drive-by-wire, la señal que opera este dispositivo es generada por el pedal del acelerador. Un sensor detecta la posición del acelerador. Esa señal se envía al PCM que, a su vez, envía una señal al cuerpo del acelerador para que se abra en una posición específica. La señal electrónica reemplaza al cable.
El motor de control electrónico del acelerador (ETC) se controla mediante un circuito de puente H dentro del PCM. Este circuito permite que se aplique un voltaje (de la señal del pedal del acelerador) a través de una carga en cualquier dirección del motor ETC para abrir y cerrar la cuchilla del acelerador.
También se están realizando trabajos experimentales con la dirección de accionamiento por cable, que, en teoría, eliminaría la conexión mecánica entre el volante y el mecanismo de dirección. Tendremos que esperar y ver cómo se desarrolla eso en los próximos años.
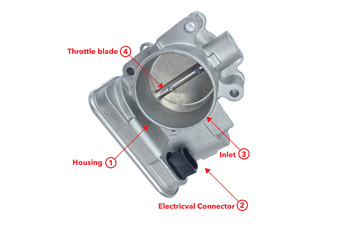
El cuerpo del acelerador para este motor se muestra en la Figura 1. Tenga en cuenta que la admisión y la hoja del acelerador se ven como un componente del acelerador convencional, pero no hay un punto de conexión para el cable. En cambio, hay un conector eléctrico en el que se conecta el cable. Además, no hay un sensor de posición del cuerpo del acelerador (TPS) separado. Está encerrado dentro de la carcasa, junto con el motor ETC.
Principales problemas DTC
Debido al diseño electrónico de este componente del cuerpo del acelerador, diagnosticar problemas es un poco más difícil. Principalmente porque los problemas eléctricos son más difíciles de detectar que los mecánicos. Afortunadamente, los diagnósticos a bordo están aquí para ayudar. El PCM realiza diagnósticos continuos del motor de CC y los circuitos. Si el PCM detecta variaciones en el consumo de corriente o la modulación de ancho de pulso, se generará un código de diagnóstico de falla (DTC). También se pueden detectar otros problemas de rendimiento.
P0121, P0122 y P0123 son DTC que indican problemas de rendimiento y problemas de circuito con el cuerpo del acelerador. Y, si se recupera el código de falla P2101, hay un problema con el rendimiento del motor ETC. Siga los procedimientos de diagnóstico descritos en el manual de servicio específico del vehículo que está reparando. Un vehículo típico con este motor de 4 cilindros y el cuerpo del acelerador de accionamiento por cable es el Chrysler 200 2012.
Si existe un problema con el motor ETC o el sensor de posición del acelerador y se indica un reemplazo para resolver el problema, se debe reemplazar todo el conjunto del cuerpo del acelerador. Estos dos componentes están ubicados dentro de la carcasa (consulte la Figura 1 ) y no se reparan por separado. Ésta es una gran diferencia entre este diseño y su contraparte mecánica. En la unidad accionada por cable, esos componentes se pueden reparar por separado
P0120 Throttle Position System Performance
P0121 Throttle Position Sensor Circuit Insufficient Activity
P0122 Throttle Position Sensor Circuit Low Voltage
P0123 Throttle Position Sensor Circuit High Voltage
P0124 Throttle Position Sensor 1 Circuit Intermittent
P0222 APP (Throttle Position) Sensor 2 Circuit Low Voltage
P0223 APP (Throttle Position) Sensor 2 Circuit High Voltage
P0224 Throttle Position Sensor 2 Intermittent
P0225 APP Sensor 3 Circuit
P0226 APP Sensor 3 Circuit Performance
P0227 APP Sensor 3 Circuit Low Voltage
P0228 APP Sensor 3 Circuit High Voltage
P0229 Throttle Position Sensor 3 Intermittent
P0505 Idle Control System Malfunction
P0506 Idle Speed Low
P0507 Idle Speed High
P0638 Throttle Actuator Control (TAC) Command Performance
P1120 Throttle Position Sensor 1 Circuit
P1121 Throttle Position Sensor Circuit Intermittent High Voltage
P1122 Throttle Position Sensor Circuit Intermittent Low Voltage
P1125 APP System
Posibles soluciones que se le puede dar a este problema
1.- Revisar Tierras y corrientes con diagrama eléctrico específico del vehículo para identificar los 5volts, 12volts o tierras
2.-Reisar conectores y cables y en su defecto limpiarlos y/o reemplazarlos
3.-Revisar el muelle del pedal de acelerador
4.-Revisar el montaje y torque de tornillos de sujeción del pedal y del cuerpo de aceleración
5.-Revisar la parte interna del cuerpo de aceleración e identificar si no esta roto el engranaje de plástico así como rastros de corrosión en su interior ya que esta es la falla más común en el cuerpo de aceleración en este caso si cuentas con un repuesto impleméntalo en los engranes ya que de otra manera tendrás que reemplazar este componente
Cómo calibrar el cuerpo de aceleración después de una reparación o reemplazo de esta pieza?
En nuestros escaneres automotrices encontramos funciones genéricas establecidas por norma OBD II/EOBD que nos permite comunicarnos con la computadora de motor para que esta nos arroje datos específicos los cuales esta presentando el vehículo con el fin de poner en estrategia el auto diagnosis y test de los componentes que integran y se relacionan con Emisiones y Sistema de Inyección
Modo $01
Información de PID
Información de datos en vivo
Datos verídicos de fallo en la computadora
Modo $02
Información de marcos congelados/Freeze Frame
Datos almacenados e los códigos establecidos
Lista de PIDs bajo el mando de OBD II (El fabricante puede agregar más PIDs)
Modo $03
Códigos OBD II
Solamente vamos a poder encontrar con códigos de Powertrain códigos con P
No lee códigos de Body, Chasis o Información (B,C,U)
Modo $04
Borrar códigos OBD II
Reseteo de los monitores
Borrar memoria de Freeze Frame/ Marco congelao
Generalmente no hay reseteo de código KAM (Keep Alive Moemory) en esta sección
Modo $05
Resultado de la prueba relacionado a sensores de oxigeno H02S
Esta función típicamente no es usada en red CAN
Moldeado en modo $06
Modo $06
Es utilizado para interpretar los daros de la computadora al escaner y para saber si los componentes estan teniendo fallas sin necesidad de tener un check engine en tablero
Funciones de prueba y diagnóstico
Monito HO2S
Monitor EGR
Monitor EVAP
Monitor de Misifire/Fallos de encendido
Modo $06 Continuo
TID, CID Y MID
TID y CID son para vehículos pre-can
TID=ID de prueba de sistema general
CID: Identificación de comonentes (Sistema individual)
Para los vehículos con red CAN que es del 2004 a la fecha
MID Y TID: son para autos con red CAN
MID: ID de monitor (sistema general)
TID: ID de prueba (Prueba Individual)
Para saber más acerca del modo $06 revisa nuestro artículo dando click AQUI
Modo $07
DTC pendientes
Muestra la listas de DTC de viaje
Modo $08
Controles Bidireccionales
Es muy utilizado para sistema EVAP
Información de la herméticidad de los sellos de purga
Los vehículos más recientes y dependiente la fabrica puede incluir más pruebas en esta sección
Modo $09
Lectura del número VIN
Lectura para leer el ID de calibración (Más información da click AQUI )
Modo $09 Continuo
Rendimiento de uso de seguimiento en vehículos CAN
Monitores en condiciones para ser revisados
Pruebas de monitores completados
Modo $10 / $0A
Códigos permanentes
Se usa para ver el histórico de códigos inclusive cuando estos ya han sido borrados
La ECU de moor uede borrar estos datos
Depende de la fabrica automotriz para que lo incluya en sus vehículos o no
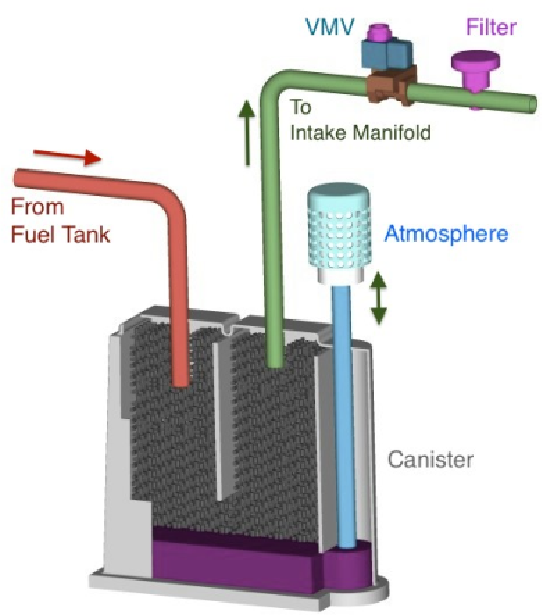
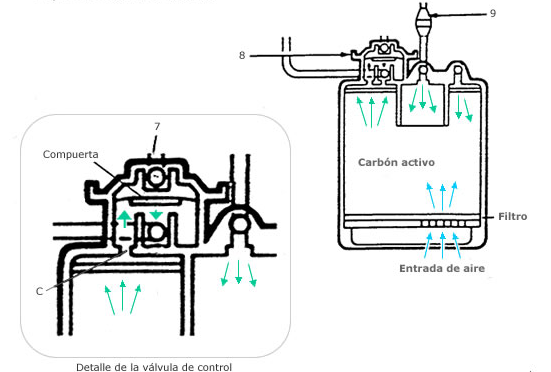
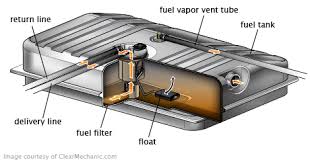
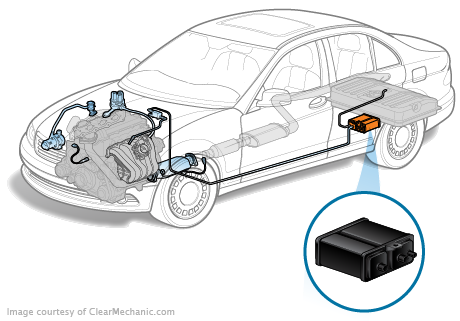
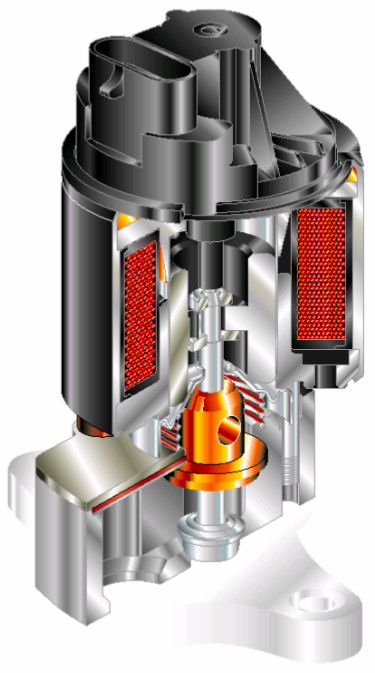
En los sistemas de Evaporacion de Emisiones (EVAP) se localiza un dispositivo que ayuda al funcionamiento del sistema su nombre es el Canister y está conectado al tanque de combustible por la línea de ventilación del tanque. El recipiente de EVAP contiene de 1 a 2 libras de carbón activado que actúa como una esponja al absorber y almacenar los vapores de combustible hasta que se abre la válvula de purga y permite que el vacío de la admisión del motor extraiga los vapores de combustible del carbón al colector de admisión del motor.
Los filtros canister generalmente se montan debajo de un soporte y se esconden fuera de la vista. Los accesorios de entrada y salida construidos de plástico o metal y, a veces, vidrio, cuelgan del tanque y están conectados a través de tubos (generalmente de vinilo) que permiten que el agua fluya hacia adentro y hacia afuera del filtro. Los tubos de entrada y salida a menudo son ajustables y pueden ofrecer múltiples opciones para que el agua ingrese nuevamente al tanque; por ejemplo, barra de rociado, retorno de chorro, tubería de lirio, etc.
Los filtros pueden ser accionados por un motor interno o por una bomba en el tanque que impulsa el agua hacia el recipiente. Todos los filtros de cartucho de Aquatop tienen motores montados internamente y dependen de la gravedad para iniciar el sistema. Una vez que el filtro está lleno de agua, la bomba interna alimenta el sistema forzando el agua a salir del filtro, subir por el tubo de retorno y volver al tanque a través de la salida del filtro. La ubicación de la bomba interna varía según el fabricante, pero conceptualmente funcionan igual. Los recipientes que funcionan con bombas en el tanque no dependen de la gravedad para iniciar el sistema, ya que el agua ingresa al filtro y no se alimenta por gravedad.
El propósito de los sistemas de emisiones por evaporación es reducir o eliminar la liberación de HC vaporizado a la atmósfera. Los vapores de HC, como los compuestos orgánicos volátiles (COV), reaccionan en la atmósfera con óxidos de nitrógeno (NOx) y contribuyen a la formación de ozono a nivel del suelo y smog fotoquímico. El ozono a nivel del suelo es un contaminante del aire con efectos nocivos para las plantas, el sistema respiratorio humano y un irritante para los ojos.El sistema de control de emisiones evaporativas (EVAP) sella el sistema de combustible del vehículo para evitar que los vapores de combustible del tanque de combustible y el sistema de combustible se escapen a la atmósfera. Esto es importante porque los vapores del combustible contienen una variedad de hidrocarburos. Los hidrocarburos forman smog cuando reaccionan con el aire y la luz solar.La gasolina se evapora muy rápidamente, por lo que si el sistema de combustible está abierto a la atmósfera, un vehículo puede contaminar las 24 horas del día sin siquiera encenderlo. ¡Estas emisiones evaporativas incontroladas representan hasta el 20% de la contaminación producida por un vehículo!
El monitor OBD II EVAP en vehículos de 1996 y más nuevos ejecuta autocomprobaciones de diagnóstico para detectar fugas de vapor de combustible, y si encuentra alguna (incluida una tapa de gasolina suelta o faltante), establecerá un código de falla y encenderá la luz Check Engine. Sin embargo, el monitor EVAP solo funciona en determinadas condiciones de funcionamiento. Esto puede crear un problema para el propietario del vehículo si su vehículo debe recibir una prueba de emisiones enchufable OBD II y el monitor no se ha completado.
Los problemas comunes con el sistema EVAP incluyen fallas con la válvula de purga que ventila los vapores de combustible al motor, fugas en las mangueras de ventilación y vacío, y tapas de gasolina sueltas, mal ajustadas o faltantes. El código de falla más común es P0440, que indica una fuga grande (a menudo una tapa de gas suelta). Los códigos de la válvula de purga EVAP (P0443 a P0449) también son comunes).
El código que no desea ver es un P0442. Esto indica que el sistema ha detectado una pequeña fuga, pero las pequeñas fugas a menudo pueden ser un GRAN problema de encontrar. ¡Por pequeño, nos referimos a una fuga no mayor que un pinchazo! Estas pequeñas fugas son prácticamente imposibles de encontrar visualmente, por lo que generalmente es necesario un probador especial llamado máquina de humo para revelar la fuga. La máquina de humo alimenta un vapor a base de aceite mineral en el sistema EVAP bajo una ligera presión (no más de unas pocas libras por pulgada cuadrada). El humo también puede contener un tinte ultravioleta para que sea más fácil ver bajo la luz ultravioleta.
La reparación de los códigos EVAP puede ser un desafío, incluso para los técnicos profesionales. Y si tiene un código de fuga pequeña P0442, probablemente tendrá que llevar su automóvil a un taller de reparación que tenga una máquina de humo.
¿POR QUÉ EVAP?
La EPA requiere sistemas EVAP en los automóviles porque los vapores del combustible de gasolina contienen una variedad de diferentes hidrocarburos (HC). Los elementos más ligeros de la gasolina se evaporan fácilmente, especialmente en climas cálidos. Estos incluyen aldehídos, aromáticos, olefinas y parafinas superiores. Estas sustancias reaccionan con el aire y la luz solar (llamada reacción fotoquímica) para formar smog. Los aldehídos son
A menudo se denomina smog instantáneo porque pueden formar smog sin sufrir cambios fotoquímicos.
Lo malo de los vapores de combustible es que el combustible se evapora cada vez que hay combustible en el tanque. Eso significa que si el sistema de combustible no está sellado o está abierto a la atmósfera, puede contaminar las 24 horas del día incluso si el vehículo no se está conduciendo. Las emisiones de evaporación incontroladas como esta pueden representar hasta el 20 por ciento de la contaminación producida por un vehículo de motor.
El sistema EVAP elimina totalmente los vapores de combustible como fuente de contaminación del aire al sellar el sistema de combustible de la atmósfera. Las líneas de ventilación del tanque de combustible y el tazón del carburador dirigen los vapores al recipiente de almacenamiento de EVAP, donde quedan atrapados y almacenados hasta que se enciende el motor. Cuando el motor está caliente y el vehículo avanza por la carretera, el PCM abre una válvula de purga que permite que los vapores se desvíen del depósito de almacenamiento al colector de admisión. Los vapores de combustible luego se queman en el motor.
Los controles de emisiones de evaporación se requirieron por primera vez en los automóviles vendidos en California en 1970. El EVAP se ha utilizado en todos los automóviles y camiones ligeros desde principios de la década de 1970.
CÓMO FUNCIONA EL SISTEMA DE CONTROL DE EMISIONES EVAPORATIVAS
Sellar el tanque de combustible no es tan simple como parece. Por un lado, un tanque de combustible debe tener algún tipo de ventilación para que el aire pueda ingresar y reemplazar el combustible a medida que el combustible es aspirado por la bomba de combustible y enviado al motor. Si el tanque estuviera sellado herméticamente, la bomba de combustible pronto crearía suficiente presión de succión negativa dentro del tanque para colapsar el tanque. En los sistemas EVAP más antiguos, el tanque se ventila mediante una válvula con resorte dentro de la tapa de la gasolina. En los vehículos más nuevos, se ventila a través del recipiente EVAP.
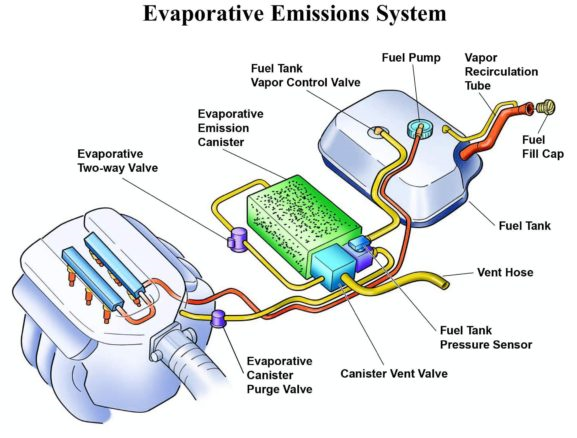
COMPONENTES DEL SISTEMA EVAP
Los componentes principales del sistema de control de emisiones evaporativas incluyen:
• Depósito de combustible: El tanque de combustible obviamente almacena la gasolina cuando se llena. Pero, ¿sabe cuándo la gente le dice que no continúe llenando el tanque después de que la bomba se detiene automáticamente? Esto se debe a que el tanque tiene algo de espacio de expansión en la parte superior para que el combustible pueda expandirse sin desbordarse o forzar la fuga del sistema EVAP.
• Tapa de la gasolina: Apriete hasta hacer clic. La tapa de la gasolina sella el cuello de llenado del tanque de gasolina de la atmósfera exterior. Los tapones de gasolina dañados o faltantes son la causa más común de códigos de falla del sistema EVAP que activan la luz de verificación del motor.
• Separador de líquido-vapor: Esto evita que la gasolina líquida ingrese al recipiente de EVAP, lo que sobrecargaría su capacidad para almacenar vapores de combustible.
•Caniester EVAP: Este bote está conectado al tanque de combustible por la línea de ventilación del tanque. El recipiente de EVAP contiene de 1 a 2 libras de carbón activado que actúa como una esponja al absorber y almacenar los vapores de combustible hasta que se abre la válvula de purga y permite que el vacío de la admisión del motor extraiga los vapores de combustible del carbón al colector de admisión del motor.
• Válvula de control de ventilación: Esto permite el flujo de los vapores de combustible desde el tanque de combustible hacia el recipiente de EVAP.
• Sensor / válvula de purga: Permite que el vacío de admisión del motor extraiga la cantidad precisa de vapores de combustible desde el recipiente de EVAP hacia el colector de admisión del motor. La estrategia de control de purga en muchos sistemas EVAP de último modelo puede complicarse bastante, por lo que el mejor consejo aquí es buscar los procedimientos de diagnóstico de EVAP en la literatura de servicio OEM.
• Mangueras de ventilación: El medio por el cual los vapores de combustible fluyen a diferentes componentes del sistema EVAP.
• Sensor de presión del tanque de combustible: Controla la presión dentro del tanque de combustible en busca de fugas y para asegurarse de que no se acumule demasiada presión.
• Sensor de nivel de combustible:Controla el nivel de combustible en el tanque.
EMISIONES EVAPORATIVAS Y OBD2
En los vehículos de 1996 y más nuevos, el sistema OBD2 monitorea el sistema de combustible en busca de fugas de vapor de combustible para asegurarse de que no se escapen hidrocarburos a la atmósfera. El monitor EVAP hace dos cosas: verifica que haya flujo de aire desde el recipiente de EVAP al motor y que no haya fugas en el tanque de combustible, el recipiente de EVAP o las líneas de vapor del sistema de combustible
El monitor OBD2 EVAP se ejecuta una vez por ciclo de conducción y solo cuando el tanque de combustible está lleno del 15 al 85%. El monitor EVAP utiliza un «sensor de flujo de purga» para detectar fugas tan pequeñas como .040 pulgadas de diámetro en los modelos 1996-99 y tan pequeñas como .020 pulgadas en la mayoría de los vehículos 2000 y más nuevos.
CÓDIGOS DE FALLA EVAP
Si el monitor OBD EVAP detecta una fuga cuando ejecuta la verificación de fugas EVAP, establecerá un código de falla en el rango P0440 a P0457:
P0440 …. Fallo del sistema de control de emisiones de evaporación
P0441 …. Sistema de control de emisiones de evaporación Flujo de purga incorrecto
P0442 …. Sistema de control de emisiones EVAP Fugas detectadas (fuga pequeña)
P0443 …. Circuito de la válvula de control de purga del sistema de control de emisiones EVAP
P0444 …. Circuito de la válvula de control de purga EVAP abierto
P0445 …. Circuito de la válvula de control de purga EVAP en cortocircuito
P0446 … Circuito de control de ventilación del sistema de control de emisiones de evaporación
P0447 … Circuito de control de ventilación del sistema de control de emisiones EVAP abierto
P0448 .. … Circuito de control de ventilación del sistema de control deemisiones EVAP en cortocircuito
P0449 … Circuito solenoide / válvula de ventilación del sistema de control de emisiones EVAP P0450 … Sensor de presión del sistema de control de emisiones de evaporación
P0451 … Sensor de presión del sistema de control de emisiones EVAP
P0452 … Entrada baja del sensor de presión del sistema de control de emisiones EVAP
P0453 …Entrada alta del sensor de presión del sistema de control de emisiones EVAP
P0454 … Sensor de presión del sistema de control de emisiones EVAP intermitente
P0455 …. Fuga detectada en el sistema de control de emisiones EVAP (fugagrande )
P0456 …. Fuga detectada en el sistema de control de emisiones EVAP (fuga pequeña)
P0457 …. Fuga detectada en el sistema de control de emisiones EVAP (tapa de combustible)
Si encuentra un código de falla P0440, P0455 o P0457 (fuga grande de vapor de combustible), retire la tapa de la gasolina, inspeccione el sello en la entrada del tanque de llenado y la parte inferior de la tapa de la gasolina en busca de mellas, escombros o daños. Luego, vuelva a enroscar la tapa de la gasolina y asegúrese de que haga clic al menos una vez para asegurar un sello hermético. Si una fuga de vapor de combustible en la tapa de la gasolina establece el código, la falla debería desaparecer y la luz Check Engine se apaga la próxima vez que se ejecuta el monitor EVAP. Si la luz permanece encendida, el problema es una tapa de gas defectuosa o una gran fuga de vapor en algún lugar del sistema EVAP (lo más probable es que una manguera de vapor tenga fugas o esté suelta).
Detección de fugas del sistema de control de emisiones por evaporación
Encontrar fugas en el sistema EVAP puede ser muy difícil. A menudo requiere el uso de una «máquina de humo» especial que genera una fina neblina de aceite mineral que se bombea al sistema EVAP con una presión muy ligera. La niebla circula a través de la tubería y eventualmente se filtra a través de la fuga, haciendo visible la fuga. La niebla también puede contener tinte ultravioleta para hacer más visible cualquier fuga cuando se ilumina con una lámpara UV.
Conforme a las características de construcción de los motores en la actualidad, se produce un incremento de emisiones de NOx. Las elevadas relaciones de compresión y de temperatura que existen en la cámara de combustión hacen que ele nitrógeno contenido e el aire de admisión reaccione con el oxigeno produciendo el NOx.
Casi el 80 por ciento del aire que respiramos es nitrógeno. Sin embargo, cuando se expone a temperaturas extremadamente altas en la cámara de combustión, más 1370 ° C, el gas normalmente inerte se vuelve reactivo, creando óxidos dañinos de nitrógeno o NOx, que luego pasan a través del sistema de escape a la atmósfera.
Para ayudar a minimizar esto, la válvula EGR permite que una cantidad precisa de gas de escape vuelva a ingresar por la admisión del sistema, cambiando efectivamente la composición química del aire que ingresa al motor. Con menos oxígeno, la mezcla ahora diluida se quema más lentamente, lo que reduce las temperaturas en la cámara de combustión en casi 150 ° C y reduce la producción de NOx para un escape más limpio y eficiente.
La válvula EGR tiene dos configuraciones principales: abierta y cerrada, aunque la posición puede variar en cualquier punto intermedio. La válvula EGR está cerrada cuando el motor está arrancando. Durante el ralentí y a bajas velocidades, solo se requiere una pequeña cantidad de energía y, por lo tanto, solo una pequeña cantidad de oxígeno, por lo que la válvula se abre gradualmente; puede estar abierta hasta un 90% en ralentí. Sin embargo, a medida que se requiere más par y potencia, por ejemplo, durante la aceleración total, la válvula EGR se cierra para garantizar que entre tanto oxígeno en el cilindro.
Además de reducir los NOx, las válvulas EGR se pueden utilizar en motores GDi reducidos para reducir las pérdidas de bombeo y mejorar tanto la eficiencia de combustión como la tolerancia a los golpes. En diésel, también puede ayudar a reducir la detonación del diésel al ralentí.
Las soluciones que se han implementado en los motores diésel son las válvulas EGR, también es común en motores a gasolina, dicha solución se basa en incrementa la temperatura de los gases de admisión para conseguir que la diferencia de temperatura sea menos elevada y así poder reducir el NOx, al igual que en los motores diésel en los motores a gasolina se introduce parte de los gases de escape en la admisión a través de la válvula EGR.
La válvula EGR esta constituida por un embobinado eléctrico que acciona con un vástago. El extremo del vástago se encuentra la válvula que comunica la zona de admisión con la de escape. La unidad de control del motor acciona el bobinado de la electroválvula con una señal de frecuencia fija y ancho de pulso en función de la apertura necesaria de la válvula. Un potenciómetro electrónico solidario al vástago informa de la posición del mismo a la ECU de motor.
Tipos de válvula EGR
Aunque existen varios tipos de válvulas EGR (los sistemas anteriores usan una válvula operada por vacío, mientras que los vehículos más nuevos se controlan electrónicamente), los tipos principales se pueden resumir en términos generales como:
Las válvulas EGR diésel de alta presión desvían los gases de escape de alto flujo y alto contenido de hollín antes de que ingresen al filtro de partículas diésel; el hollín se puede combinar con el vapor de aceite para crear lodos. Luego, el gas se devuelve al colector de admisión a través de una tubería o perforaciones internas en la culata. También se utiliza una válvula secundaria para ayudar a crear un vacío en el colector de admisión, ya que no está presente de forma natural en los motores diesel.
Las válvulas EGR diésel de baja presión desvían los gases de escape después de que han pasado a través del filtro de partículas diésel; este gas tiene un flujo menor pero está casi completamente limpio de hollín. Luego, el gas se devuelve al colector de entrada a través de una tubería.
Las válvulas EGR de gasolina desvían los gases de escape, al igual que el equivalente diésel de alta presión. El vacío creado por la depresión del cilindro, aspira los gases de escape y el flujo se regula mediante la apertura y el cierre de la propia válvula EGR.
Las válvulas EGR operadas por vacío usan un solenoide de vacío para variar el vacío al diafragma y, a su vez, abren y cierran el EGR. Algunas válvulas también incluyen un sensor de retroalimentación para informar a la ECU de la posición de las válvulas.
Las válvulas EGR digitales cuentan con un motor de solenoide o paso a paso y, en la mayoría de los casos, un sensor de retroalimentación. Estas válvulas reciben una señal modulada por ancho de pulso desde la ECU, para regular el flujo de gases de escape.
La topología de RED es la interconexión de módulos entre si, este tema es importante ya que al ver la topología en nuestro escáner podemos visualizar algún problema que nos esté generando y que repercuta en diferentes módulos
La topología de red se define como el mapa físico o lógico de una red para intercambiar datos. En otras palabras, es la forma en que está diseñada la red, sea en el plano físico o lógico. El concepto de red puede definirse como «conjunto de nodos interconectados». Un nodo es el punto en el que una curva se intercepta a sí misma. Lo que un nodo es concretamente depende del tipo de red en cuestión
La red CAN posee una topología tipo bus de dos cables diferenciales denominados CAN High (CANH) y CAN Low (CANL), que interconectan a los nodos en paralelo. Se sugiere la utilización de cables de par trenzado blindados con impedancia característica de 120 [Ω]
En metodología de diagnóstico identificar las topologías de red han hecho que los diagnósticos sean más precisos porque de esa manera uno puede identificar sobre que parte y en que módulos uno va a trabajar, pero no neesariamente es el módulo que puede estar mal, puede que este dañado algun cable que es la que hace la unión entre módulos y ahi podemos encontrar algun corto
También para diagnóstico es importante que cuando Escaneamos podemos encontrar algún problema de Pérdida de comunicación con algún módulo o simultaneas pérdidas de comunicación y de esta manera uno puede ir a la topología de red para verificar esta unión entre módulos, entender esa red y de esa manera atender el problema y con los diagramas eléctricos apoyarse para ver la cabrería que integra esa topología de red
Bus: Esta topología permite que todas las estaciones reciban la información que se transmite, una estación transmite y todas las restantes escuchan. Consiste en un cable con un terminador en cada extremo del que se cuelgan todos los elementos de una red. Todos los nodos de la red están unidos a este cable: el cual recibe el nombre de «Backbone Cable». El bus es pasivo, no se produce regeneración de las señales en cada nodo. Los nodos en una red de «bus» transmiten la información y esperan que ésta no vaya a chocar con otra información transmitida por otro de los nodos. Si esto ocurre, cada nodo espera una pequeña cantidad de tiempo al azar, después intenta retransmitir la información.
El ID de calibracion es un elemento muy importante porque ahí podemos saber la configuración y software que tiene la ECU de motor, esta opción la podemos encontrar en el modo $09 de OBD II/EOBD genérico y va a ser muy útil para saber con que software estamos trabajando y con el número VIN podemos identificar estos datos para antes de hacer una programación a la ECU de motor.
Uso para programación
En los portales de las fabricas automotrices podemos identificar el Calibration ID e identificar si hay un nuevo software que corrige fallas y/o errores en el funcionamiento del motor tal es el ejemplo de GM como se muestra a continuación.
Se puede observar la última versión de software y que falla corrige
Descripción básica
La identificación CAL ID o Calibración que es básicamente la «versión de software» de la ECU, que refleja parámetros específicos de ese vehículo en particular. Esto podría cambiarse reprogramando o «REFLASHEANDO» la ECU, y podría cambiar como resultado de un RECALL relacionado con las emisiones u otro servicio que cambie cualquier parte del funcionamiento del motor que afecte las emisiones (básicamente cualquier cosa ). Es probable que también sea muy diferente en el mismo hardware de ECU físico utilizado en diferentes vehículos y / o motores.
Como ya decíamos es muy útil para saber con que Calibración y VIN estamos trabajando antes de realizar una programación y reflasheo a una ECU de motor