
El protocolo CAN con velocidad de datos flexible (CAN FD) para satisfacer las demandas de la industria y los consumidores. Como resultado, los ingenieros de la industria automotriz necesitan comprender el protocolo a un nivel más profundo para poder aprovechar sus capacidades. Este documento técnico cubrirá la motivación para el nuevo protocolo, las especificaciones técnicas clave que lo diferencian del CAN tradicional e introducirá herramientas de NI que se pueden usar para probar y simular dispositivos CAN FD.
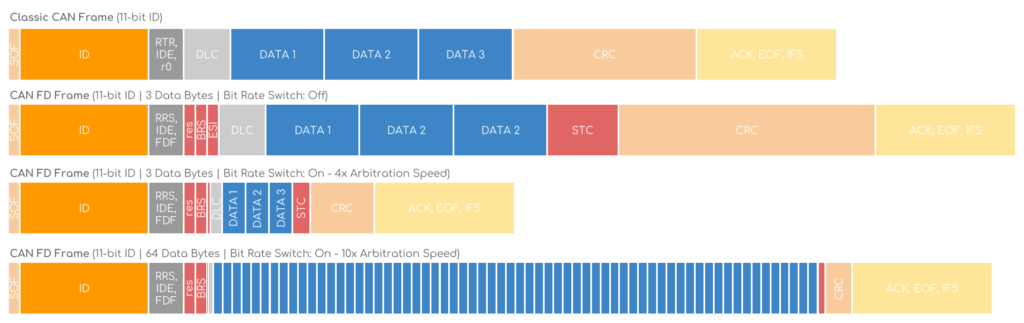
El CAN-FD incluye algunos cambios en la trama. En en la fase de arbitraje se modifica el valor del bit reservado para identificar si nos encontramos ante un mensaje de CAN o de CAN-FD. Si se detecta este bit, la trama es de CAN-FD.
CAN-FD permite utilizar una tasa de transferencia (data rate) diferente en la fase de arbitraje y en la de datos. En el bus clásico, todo el mensaje se transmite a la misma velocidad. En un bus CAN-FD puede configurarse una tasa mayor para la fase de datos. A nivel teórico podría configurarse hasta 15Mbps, aunque en la práctica será raro ver más de 5Mbps. Esto se indica en un bit de la trama denominado Bit Rate Switch.
El protocolo CAN (Controller Area Network) existe desde la década de 1980 y se ha convertido en la red de vehículos más utilizada para la comunicación de sensores y ECU. Con las crecientes demandas legislativas, de seguridad y de consumo sobre los automóviles, la cantidad de dispositivos electrónicos integrados que transmiten datos aumenta constantemente y la cantidad de datos que se utilizan para el control y el diagnóstico aumenta aún más rápido. Esto ha creado la necesidad de poder transmitir más datos dentro del vehículo para lograr la funcionalidad que requieren los vehículos actuales. Pero al igual que con todo lo que hay en el automóvil, el costo de poder hacer esto es crítico y debe minimizarse para que la industria lo adopte a gran escala. El protocolo CAN FD logra esto al permitir dos requisitos clave de la industria:
Alta y baja velocidad
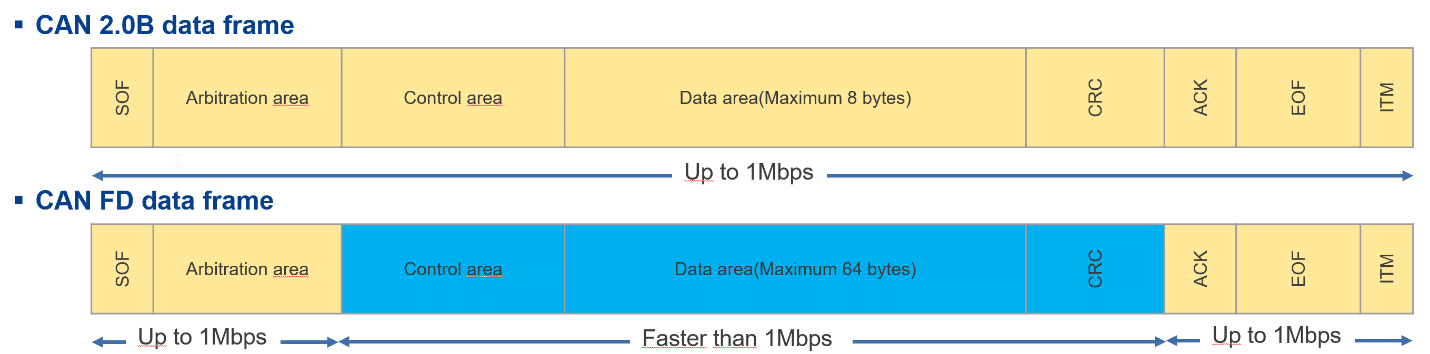
El bus CAN admite velocidades de datos de hasta 1 Mbps. Con el bus CAN FD se puede aumentar la tasa de datos para el área de Control y Datos dependiendo del reloj máximo del controlador CAN FD. La tarifa para la fase de arbitraje se mantiene en un máximo de 1 Mbps. La latencia para las transmisiones en el bus CAN es inferior a 145us y para CAN FD con 8Msps y 8Byte Data inferior a 58us.
Los marcos de datos cortos tienen una ventaja en términos de latencia. El paquete completo se transfiere más rápido, luego se decodifica más rápido y, por lo tanto, el tiempo de reacción es mucho más rápido. Con tasas de transmisión más altas en CAN FD, este efecto es aún mayor. En comparación, por ejemplo, con la comunicación TCP/IP, que está diseñada para una gran cantidad de datos, los paquetes son relativamente grandes y, por lo tanto, la latencia aumenta. Eso significa que CAN FD, dependiendo de la cantidad de datos, tiene potencialmente tiempos de reacción más cortos que la comunicación TCP/IP con 10 o 100 Mbit, y muestra un mejor rendimiento total en tiempo real, con detección de errores a tiempo.

Mayor ancho de banda de comunicación de electrónica automotriz
La especificación CAN original definida en el estándar ISO 11898 limita la comunicación de red a un ancho de banda máximo de 1 Mbit/s. Esta limitación hace que los proveedores y fabricantes de automóviles quieran seguir utilizando el protocolo CAN para diseñar redes CAN adicionales en el vehículo para transmitir los datos necesarios. Sin embargo, más redes en un automóvil requieren un cableado adicional significativo, lo que aumenta el peso del vehículo y disminuye el rendimiento del vehículo y la eficiencia del combustible.
CAN FD resuelve el problema de limitación del ancho de banda al permitir velocidades de bits superiores a 1 Mbit/s y al mismo tiempo aumentar el soporte de cargas útiles en un mensaje CAN FD por encima del máximo anterior de 8 bytes. Muchas empresas automotrices todavía están analizando las velocidades de bits que usarán en el automóvil, pero algunas de las más comunes son 2 y 5 Mbit/s, mientras que otras están considerando usar hasta 8 Mbit/s para aplicaciones clave como el flasheo de la ECU. y transmitir mensajes largos. Las tramas formateadas CAN FD aumentan significativamente el soporte de carga útil al permitir hasta 64 bytes en un solo mensaje.