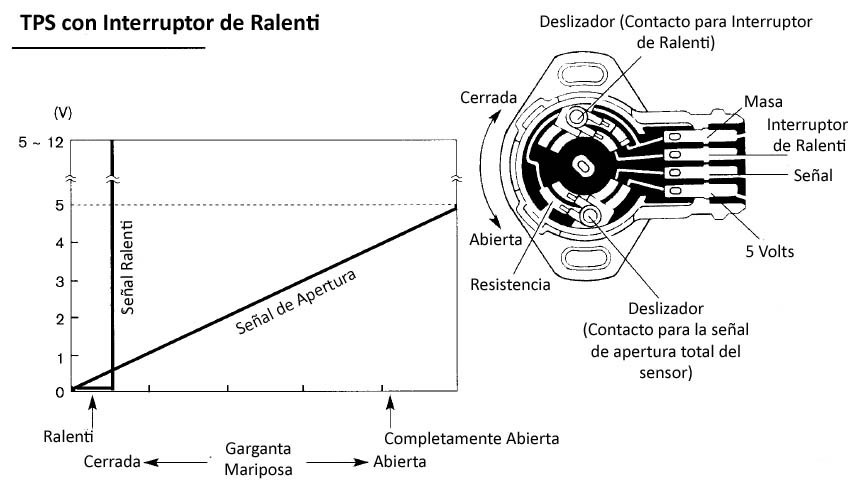
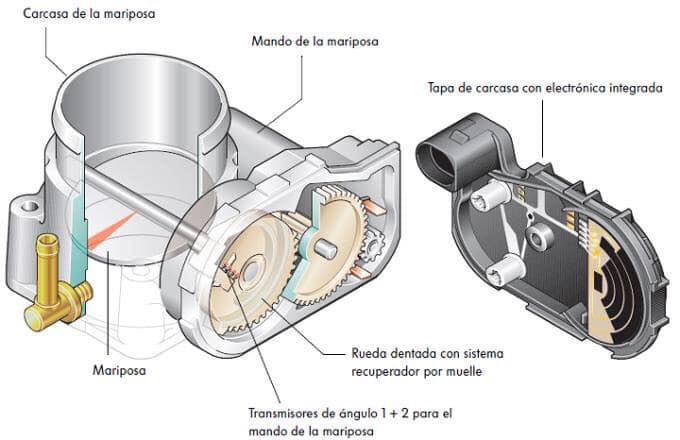
Se utiliza un sensor de posición del acelerador (TPS) para monitorear la posición de la válvula del acelerador en los motores de combustión interna. El TPS generalmente se encuentra en el eje de la válvula de mariposa en el cuerpo de aceleración para que pueda monitorear directamente su posición. El sensor TPS es un potenciómetro que consiste en una una resistencia variable en función de la posición de la válvula del acelerador La señal del sensor es utilizada por la unidad de control del motor (PCM) como entrada a su sistema de control. La sincronización del encendido y la sincronización de la inyección de combustible, se alteran según la posición de la válvula de mariposa y también según la velocidad de cambio de esa posición. Algunas modificaciones de la válvula del acelerador tienen interruptores finales integrados. Son sensores de posición de aceleración cerrada (CTPS) y a menudo incluyen un sensor de aceleración totalmente abierta (WOT) que está montado en el pedal del acelerador. La señal de posición del acelerador se puede producir a partir de un simple contacto (TS) o un potenciómetro (TPS), y también de un sensor combinado TS / TPS. Algunos sistemas utilizan ambos tipos como elementos separados.
Funcionamiento
Sensor de potenciómetro del acelerador (TPS)
El TPS proporciona al PCM información sobre el ralentí, la desaceleración, la tasa de aceleración y el estado de la válvula de mariposa completamente abierta (WOT).
El TPS es un potenciómetro de tres hilos.
Primer cable se aplica un voltaje de + 5V a la capa resistiva del sensor
Segundo cable cierra el circuito del sensor a tierra.
Tercer cable está conectado a la pluma del potenciómetro, por lo que cambia la resistencia y, por lo tanto, el voltaje de la señal que regresa a la PCM
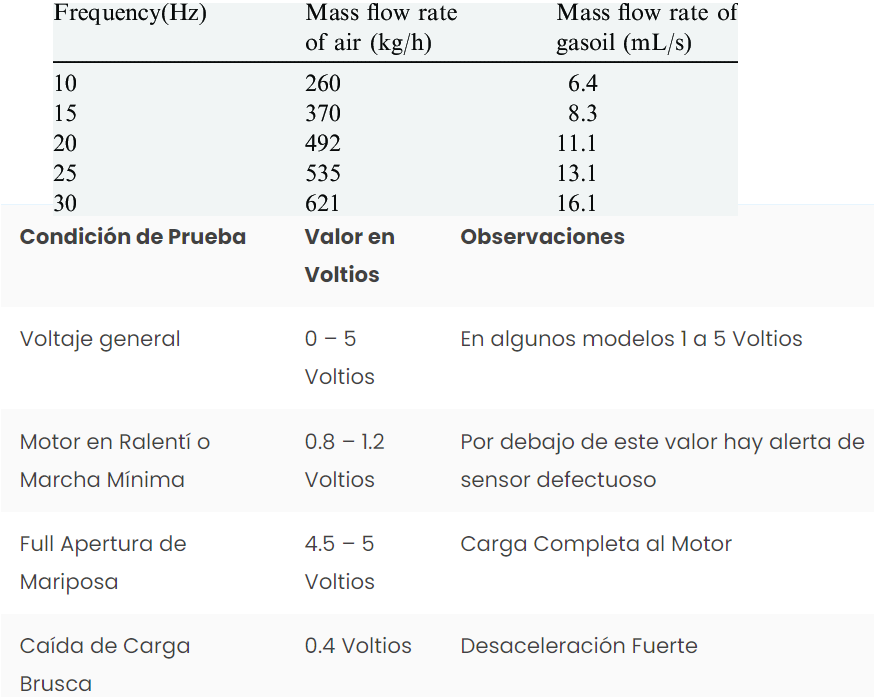
Según el voltaje recibido, la PCM puede calcular el ralentí (por debajo de 0,7 V), la carga completa (aproximadamente 4,5 V) y la velocidad de apertura de la válvula de mariposa. En estado de carga completa, la PCM proporciona un mayor enriquecimiento de la mezcla de combustible. En el modo de desaceleración (válvula de mariposa cerrada y velocidad del motor por encima de ciertas RPM), la computadora de a bordo apaga la inyección de combustible. El suministro de combustible se reanuda después de que la velocidad del motor alcanza su valor de ralentí o cuando la válvula de mariposa está abierta. Algunos coches permiten el ajuste de estos valores.
Pruebas al TPS
Verifique el voltaje del TPS
Conecte el terminal negativo de un voltímetro a la tierra del motor.
Determine los terminales de tierra, inactivo y de carga completa.
NOTA: La mayoría de los potenciómetros del acelerador tienen tres terminales, pero algunos pueden tener contactos adicionales, que funcionan como interruptores del acelerador. Si existe tal contacto, debe verificarse como se describe arriba para el interruptor del acelerador.
Conecte el terminal positivo del voltímetro al cable conectado a la señal de contacto del potenciómetro de la válvula de mariposa.
Encienda el encendido, pero no arranque el motor. En la mayoría de los sistemas, la lectura de voltaje debe ser inferior a 0,7 V.
Abra y cierre la válvula de mariposa varias veces, comprobando la suavidad de la tensión ascendente.
Verificar la resistencia del TPS
Conecte un ohmímetro entre el limpiador del potenciómetro y el terminal de voltaje de referencia o entre el limpiador del potenciómetro y la tierra.
Abra y cierre la válvula del acelerador varias veces y verifique la suavidad de la variación de resistencia. Si la resistencia del potenciómetro es infinita o cero, esto indica un mal funcionamiento.
No se muestran los valores exactos de la resistencia del potenciómetro del acelerador. Una de las razones es que muchos fabricantes no publican datos de control. El hecho de que la resistencia del potenciómetro se mantenga dentro de los límites es menos importante que el correcto funcionamiento del potenciómetro, es decir, la resistencia cambia suavemente al mover la válvula de mariposa.
Conecte un ohmímetro entre la tierra y los terminales de voltaje de referencia. La resistencia debe ser constante.
Si la resistencia es infinita o baja, se debe reemplazar el potenciómetro
El sensor APP (Accelerator Pedal Position) o sensor de posición de pedal de acelerador es el encargado de comunicarle a la ECU de motor en qué posición de pisado se encuentra el pedal para hacer la correlación con el sensor TPS . La mayoría de los sensores de posición del pedal de aceleración están equipados con dos potenciómetros para aumentar la confiabilidad. Cada potenciómetro tiene su propia fuente de alimentación desde la ECU, lo que significa que el número de conexiones puede ser de hasta 6 pines . El potenciómetro contiene una pista de carbono conectada a la fuente de alimentación en un extremo y tierra en el otro. Un control deslizante conectado mecánicamente al pedal del acelerador se desliza sobre la pista de carbono recogiendo el voltaje del sensor.
Si el sensor contiene dos potenciómetros, la fuente de alimentación generalmente se conecta al revés al segundo potenciómetro. Cuando se mueve el pedal de aceleración, el voltaje de la señal de un potenciómetro aumenta mientras que el otro disminuye. El sensor de posición del pedal de aceleración en este ejemplo de medición también contiene dos potenciómetros, pero ambos están conectados de la misma manera. Como resultado, ambas señales son iguales excepto por un desplazamiento diferente.
La información de la posición del acelerador se transfiere al módulo de control del actuador del acelerador (TAC) y al módulo de control del tren motriz (PCM). El sensor de posición del acelerador se compone de dos sensores individuales, con ambos sensores diseñados para tener cableado de retorno de sensor individual. Cada sensor tiene un rango de voltaje variable.
El sistema PCM recibe y procesa las señales eléctricas de los sensores ACC, junto con las señales del motor de corriente continua (CC), que establece la placa del acelerador a través de un cable del acelerador. Cuando el conductor presiona el pedal del acelerador, la presión hace girar la placa del acelerador dentro del cuerpo del acelerador, lo que abre un pasaje dentro de esta unidad para permitir el flujo de aire. A medida que el aire viaja a través del paso del acelerador hacia el colector de admisión, activa los sensores de flujo de aire que manipulan la unidad de control del motor y empujan el combustible hacia el sistema de inyección de fluido.
El sensor que compone la unidad de sensor de APP se llama potenciómetro (montado en el pedal del acelerador). En algunos sensores, también hay un segundo y tercer sensor para componer la unidad de sensor de APP. En términos de un sistema jerárquico, el primer sensor es la entrada principal para acelerar a fondo. Si hay una discrepancia entre la señal de voltaje de salida de los potenciómetros que monitorean la posición del pedal o el sensor en sí, la unidad PCM reducirá el rendimiento del vehículo, configurando así la unidad APP en un ‘modo de emergencia’.
Las señales generadas por cada uno de los potenciómetros son diferentes. Mientras que uno de los potenciómetros transmitirá una señal de voltaje (que varía entre 0 y 5 voltios) a la unidad PCM sobre la posición del pedal, el segundo y tercer sensor se comportan como una unidad de respaldo. Durante el movimiento de un vehículo, la unidad PCM está comparando continuamente la salida de los tres potenciómetros del sistema de sensor de APP.
La falla del sensor de la aplicación será el resultado más común de la exposición continua a altos niveles de calor debido a su ubicación en la tabla del piso, que se encuentra junto al cortafuegos del vehículo. Aunque los sensores de APP normalmente mantendrán una funcionalidad adecuada durante la vida útil del vehículo, ocasionalmente será necesario reemplazarlo. Los sensores alternativos para la aplicación que han demostrado mostrar propiedades y funciones similares incluyen sensores resistivos, magnéticos e inductivos.
En aplicaciones que no usan un sensor de temperatura del refrigerante del motor (ECT), se usa el sensor CHT para determinar la temperatura del refrigerante del motor. Para cubrir todo el rango de temperatura tanto del CHT y sensores ECT, el PCM tiene un circuito de resistencia de conmutación doble en la entrada CHT. Un gráfico que muestra la temperatura cambia de la línea COLD END a la línea HOT END, con el aumento de temperatura y espalda con temperatura decreciente está incluida. Anote la zona de superposición de temperatura a voltaje.
Dentro de esta zona es posible tener un voltaje COLD END o HOT END al mismo temperatura. Por ejemplo, a 90ºC (194ºF), el voltaje podría indicar 0,60 voltios o 3,71 voltios. Referir a la tabla para los valores esperados de temperatura a voltaje.
Valores de voltaje calculados para VREF = 5 voltios. Estos valores pueden variar en un 15% debido al sensor y variaciones de VREF.
La ubicación de este componente por lo general siempre va insertada en la cabeza de motor y/o en medio de las bujías
Pruebas
Con la llave en la posición APAGADA y el conector del sensor CHT desconectado, mida la resistencia entre los pines del sensor.
La resistencia normal está relacionada con la temperatura del motor. Consulte la tabla para conocer las lecturas de resistencia normales.
El sensor de velocidad diferencial transmite la velocidad de la corona del diferencial al módulo de control del ABS. El módulo de control calcula la velocidad del vehículo usando estos datos.
Este sensor al igual que los otros 4 que van integrados en las ruedas del vehículo complementan la información necesaria requerida para determinar correctamente la aplicación de los frenos y que no exista un bloqueo de ruedas que pueda provocar un accidente.
Este sensor por lo general va integrado en la parte superior del diferencial, ya sea en diferenciales delanteros (Para autos quattro, 4×4 o 4WD) o traseros.
Funcionamiento
El sensor magnético tipo tipo HALL detecta las muescas de la corona del diferencial haciendo un conteo de revoluciones de esta para detectar a la velocidad a la que esta girando la flecha cardan que viene de la transmisión y que sale a las ruedas mediante el diferencial
Coteja la información el Módulo ABS con los otros 4 sensores de rueda y con los sensores de diferenciales para que se aplique la fuerza correcta de frenado en cada una de las ruedas de modo que no exista ningun derrapamiento de este
El sensor de posición de la transmisión, también conocido como sensor de rango de transmisión, es un sensor electrónico que proporciona una entrada de posición al Módulo de control del tren motriz (PCM) para que la transmisión pueda ser controlada correctamente por el PCM de acuerdo con la posición ordenada por el sensor.
El sensor de rango de la transmisión a veces también se denomina interruptor de estacionamiento / neutral o interruptor de seguridad. Se comunica con el módulo de control de transmisión del vehículo y el PCM, y está conectado a la válvula manual de transmisión.
El interruptor de rango de la transmisión identifica si la palanca selectora está en estacionamiento o en neutral y envía la señal al módulo de control de la transmisión. Lo hace para garantizar que el vehículo arranque en posición de estacionamiento y neutral e informar al PCM sobre la posición de la palanca de cambios. El PCM envía una referencia de voltaje al sensor, mientras que el sensor envía un voltaje diferente al PCM, dependiendo de la palanca de cambios en la que se encuentre.
La rotación de la corona cambia el campo magnético, que, a su vez, cambia el voltaje en el sensor de rango de transmisión. Estas señales de voltaje son enviadas a la unidad de control por el sensor de rango de transmisión.
Fallos comunes DTC
Código de diagnóstico de problemas (DTC) El código P0705 significa «Mal funcionamiento del circuito del sensor de rango de la transmisión (entrada PRNDL)». Se activa cuando el sensor de rango de transmisión no puede enviar datos o proporciona una entrada errónea a los módulos de control de transmisión (TCM) o de control del tren motriz (PCM).
El código de error P0706 ocurre cuando la transmisión no recibe datos claros del sensor de rango de transmisión, o el voltaje de retorno no es el que se supone que es. Esto generalmente sucede cuando el vehículo se está moviendo y lee que el vehículo está viajando a una velocidad que no coincide con la lectura del PCM para la posición de cambio actual, como cuando viaja a cualquier velocidad cuando la transmisión lee e informa que todavía está en estacionamiento o posición neutral.
Código de error P0707: Entrada baja en el circuito del sensor de rango de transmisión
Código de error P0708: Entrada alta en el circuito del sensor de rango de transmisión
Código de error P0709: circuito del sensor de rango de transmisión intermitente
Código de error P0814: circuito de visualización del rango de transmisión
Código de error P0819: Cambio de cambio hacia arriba y hacia abajo para correlación del rango de transmisión
El sensor de temperatura exterior o ambiente es un sensor que va instalado en la parte frontal del vehículo para ser precisos en la facia donde se encuentran ubicadas las parrillas por donde fluye el aire que entra al motor, este sensor determina la temperatura que hay en el exterior del vehículo con el fin de tomar datos informativos y mostrárselo al conductor
La información que recaba el sensor se muestra en el tablero del vehiculo indicando los grados que detecta el sensor en el ambiente y también es muy importante para el sistema de Aire acondicionado ya que con la información recabada el módulo de Aire acondicionado hace los ajustes necesarios para poder trabajar de manera optima el sistema de Aire acondicionado
Por lo general el funcionamiento eléctrico de este sensor es el de un sensor de temperatura común y corriente resistencia alta baja temperatura, resistencia baja tendremos una alta temperatura
Cuando este sensor falla se generan códigos DTC P0070, P0071, P0072, P0073 Y P0074, y en el tablero no aparece la temperatura registrada por lo general aparecen cuatro rallas tal y como en este ejemplo ( —- °C ).
Por lo general no genera una luz Check Engine, pero sin embargo si escaneamos el auto en el módulo de Aire Acondicionado y Motor aparecerán códigos de error ya mencionados
Un sensor de presión de refuerzo es parte de un motor turboalimentado que mide y regula la presión de aire en el colector de admisión y controla el nivel de impulso del motor sobrealimentado. Un BPS monitorea la velocidad y la presión del flujo de aire en el colector de admisión y asegura que el motor permanezca en su nivel óptimo y reciba el suministro ideal de aire y combustible.
Principio de funcionamiento del BPS
El sensor de presión de refuerzo mide la presión absoluta antes de la válvula de mariposa. La unidad de control del motor usa su señal para calcular un valor de corrección para la presión de refuerzo. Al detectar la cantidad de impulso y la densidad del aire en el colector de admisión del automóvil, la unidad de control electrónico o ECU del automóvil puede determinar cuánto combustible se necesita en la cámara de combustión del automóvil para que la mezcla de aire y combustible esté en su mejor momento. La mezcla adecuada de aire y combustible es fundamental para los motores, ya que esto se traduce en una producción de energía mejor y más eficiente. Esto no solo hace que el motor sea más potente, sino que también hace que el motor funcione de manera efectiva, maximizando cada gota de combustible.
Cuando la presión del múltiple es baja (alto vacío), la salida de voltaje del sensor es 0.25-1.8V en el ECM. Cuando la presión del múltiple de admisión es alta debido al turboalimentador, la salida de voltaje del sensor es 2.0-4.7V. El rango de presión está entre 10kPa y 350kPa. El sensor recibe una referencia de 5V del ECM. La tierra del sensor también es proporcionada por el ECM. El ECM utiliza la presión de refuerzo combinada con la temperatura del aire de admisión para determinar el volumen de aire que ingresa al motor.
Orden para verificar la funcionalidad del BPS
• Prueba de la tensión de alimentación.
Desconecte el enchufe del sensor.
Encienda el encendido.
Ajuste el multímetro a «voltaje de CC».
Mida el voltaje de alimentación entre el pin C (3) y la tierra A (1). Debe ser de aproximadamente 5V. Si no se alcanza este valor, debe localizarse la falla en el suministro de voltaje.
• Prueba de la señal de salida
Retire el sensor de presión del colector de admisión.
Conecte la bomba manual de vacío al sensor de presión.
Encienda el encendido.
Ajuste el multímetro a «voltaje de CC».
Establezca el valor de presión absoluta más bajo P-bajo.
Pruebe la señal de salida inferior U-baja entre el pin B (2) y la tierra A (1).
Establezca el valor de presión absoluta superior P-alto.
Pruebe la señal de salida superior U-high entre el pin B (2) y la tierra A (1).
• Verificación rápida del BPS usando un osciloscopio
Restaure todas las conexiones al BPS como durante el trabajo normal del motor.
Conecte el cable de tierra del osciloscopio a la tierra del chasis.
Conecte el cable de prueba del osciloscopio activo al terminal de señal del BPS (generalmente en el medio).
Arranque el motor y déjelo al ralentí.
Presione bruscamente el acelerador y luego suéltelo inmediatamente. Tenga en cuenta que el voltaje no se elevará a su máximo cuando el automóvil no esté funcionando. Esto es normal debido a la baja carga del motor.
Debe ver la señal de salida de CC que varía de 1.0V a 3.0V, que cambiará simultáneamente con la posición del acelerador.
En la figura 2 podrá monitorear el cambio de presión (eje y) en función del tiempo (eje x).
• Posibles fallas en el BPS: – Señal de salida caótica
La señal de salida caótica es, cuando la señal de voltaje cambia aleatoriamente, cae a cero y desaparece. Esto generalmente ocurre cuando hay un BPS ineficiente. En este caso, el sensor debe ser reemplazado.
– Falta de voltaje de señal
Compruebe si se aplica la tensión de alimentación (+ 5.0V).
Verifique la conexión a tierra para detectar problemas.
Si el voltaje de alimentación y la conexión a tierra son correctos, verifique el cable de señal entre el BPS y el controlador a bordo.
Si el voltaje de suministro y / o la conexión a tierra no son correctos, verifique la integridad de los cables entre el sensor y la ECU.
Si todos los cables del sensor son correctos, verifique todas las conexiones para el voltaje de referencia y tierra del controlador a bordo. Si son correctos bajo sospecha cae el controlador.
– La fuente de alimentación BPS o la señal es igual al voltaje de la batería del automóvil.
Compruebe si hay un cortocircuito a la p terminal de ositivo de la batería del coche.
• Otros controles:
Verifique si hay combustible excesivo en la manguera o trampa de vacío.
Revise la manguera de vacío por fugas y / u otros daños.
Verifique si hay partes mecánicas dañadas del motor, sistema de encendido o en el sistema de combustible, lo que provoca un bajo vacío.
El sensor MAP (Manifold Air Pressure ) canaliza una señal a la ECU para ajustar el tiempo y relación de aire/combustible basándose en la cantidad de presión en el múltiple de admisión. Detecta las variaciones de presión en el interior del múltiple de admisión según también los cambios de carga y velocidad
El sensor MAP está conectado al múltiple de admisión a través de una manguera de vacío. El vacío en el múltiple de admisión acciona el diafragma del sensor de MAP. El convertidor transforma la presión medida en una señal eléctrica que se alimenta al ECU. La ECU estima los datos de los valores del sensor MAP como: «Presión absoluta» = «Presión atmosférica» - «presión múltiple».
Al utilizar el método de velocidad / densidad, el ECU calcula la composición de la mezcla de combustible en función de la señal de MAP y la velocidad del motor. Este método se basa en la teoría de que con cada giro el motor aspira un volumen fijo de aire. La precisión de este método no se puede comparar con la del sensor de cantidad de aire, que después de una medición precisa del flujo de aire calcula la relación de mezcla de combustible en función de la masa o el volumen de aire aspirado del motor.
Cuando hay un alto nivel de vacío en el colector de admisión (por ejemplo, inactivo), la señal de salida MAP es relativamente baja y ECU proporciona menos combustible.
En sistemas con colector de admisión de tipo «húmedo» (por ejemplo, SPi), los cambios en la presión del colector pueden hacer que el combustible que ingresa a la manguera de vacío alcance el MAP. Para evitar esto, se utiliza una trampa especial y, en consecuencia, se traza la manguera de vacío. Si el combustible llega al sensor MAP, su diafragma puede dañarse.
En los sistemas MPi, el colector es de tipo «seco» y el combustible no puede entrar cuando se rocía sobre las válvulas de admisión. Por lo tanto, no hay riesgo de penetración de combustible del sensor de MAP y contaminación del diafragma, y por lo tanto no se usa una trampa especial. Cuando el sensor MAP está integrado en el controlador integrado, el posible reemplazo del MAP requerirá el reemplazo de todo el controlador.
Sensor MAP analógico
Inspección general inicial
Conecte un medidor de vacío entre el colector de admisión y el sensor MAP, utilizando una junta en T.
Dejó el motor al ralentí. Si el vacío en el motor es pequeño (menos de 570 mbar a 700 mbar), verifique la presencia de las siguientes fallas:
Despresurización
Tubo de vacío dañado o agrietado;
Manguera de vacío bloqueada;
Problema mecánico del motor, como la correa de distribución mal ajustada que acciona el árbol de levas;
Fugas en la membrana del sensor de MAP (si el sensor está integrado en el controlador integrado).
Desconecte el medidor de vacío y conecte en su lugar una bomba de vacío.
Con la bomba, cree un vacío de alrededor de 750 mbar (75 kPa) en el sensor de MAP.
Apague la bomba de vacío. La membrana del sensor debe mantener el mismo valor de vacío al menos 30 segundos.
Conecte el terminal negativo de un voltímetro de CC a la tierra del chasis.
Identifique la tensión de alimentación, señal y terminales de tierra.
Una el terminal positivo del voltímetro al cable de señal del sensor MAP.
Desconecte la manguera de vacío del sensor.
Conecte el sensor MAP a una bomba de vacío.
Encienda el encendido (pero no arranque el motor).
Compare el voltaje con el valor regulatorio para este tipo de vehículo y motor.
Cree vacío con el valor mencionado en la Tabla 1 y controle la suavidad del cambio de voltaje.
Los resultados de los motores turbo (Tabla 3) son diferentes de los resultados de los motores «atmosféricos» (Tabla 2).
Vacio Aplicado Mbar
Voltaje V
Valor del MAP Bar
0
4.3 – 4.9
1.0 ± 0.1
200
3.2
0.8
400
2.2
0.6
500
1.2 – 2.0
0.5
600
1.0
0.4
Condicion
Voltaje V
Valor MAP Bar
Vacio Bar
Cuerpo de aceleración abierto al 100%
4.35
1.0 ± 0.1
0
Motor encendido
4.35
1.0 ± 0.1
0
Ralenti
1.5
0.28 – 0.55
0.72 – 0.45
Motor apagado
1.0
0.20 – 0.25
0.80 – 0.75
Condicion
Voltaje
Valor MAP Bar
Vacio Bar
Cuerpo de aceleración abierto al 100%
2.2
1.0 ± 0.1
0
Encendido Conectado
2.2
1.0 ± 0.1
0
Ralenti
0.2 – 0.6
0.28 – 0.55
0.72 – 0.45
Sensor MAP digital
Determine el suministro de voltaje, señal y terminales de tierra.
Conecte la sonda de tierra del osciloscopio a la tierra del chasis y el extremo activo, al cable de señal de salida del sensor.
Encender el motor. Debe observar una forma de onda similar a la de la figura
Si tiene un lector de fallas y puede leer el cambio de velocidad del motor, realice el proceso que se describe a continuación.
Aumente la velocidad del motor a 4500 – 4900 rpm.
Conecte una bomba de vacío a la manguera de vacío del sensor de MAP. El vacío debe mantenerse al mismo nivel para todos los valores de voltaje.
Vacio MBar
La velocidad debe reducirse a:
200
525 ± 120 rpm
400
1008 ± 120 rpm
600
1460 ± 120 rpm
800
1880 ± 120 rpm
Cuando se corta la presión, el valor medido del número de ciclos debe ser igual a la posición inicial – 4500 – 4900 rpm.
Reemplace el sensor MAP, si funciona de manera diferente a la descrita anteriormente.
La función principal del sistema ABS es controlar la velocidad de las ruedas cuando se presiona el pedal del freno monitoreando si alguna de las ruedas disminuye su velocidad más rápido que las demás. Esto significa que existe la posibilidad de un «bloque» de rueda. Lo que ahora se llama «Control de estabilidad» ESP y es mucho más avanzado que el ABS estándar. Los autos nuevos están equipados con un sistema antideslizante, que básicamente funciona frente al ABS. Si hay algún aumento en la velocidad individual de cualquiera de las ruedas al acelerar, esta rueda es alimentada por presión de disminución para reducir la diferencia. Durante este tiempo, la unidad de control electrónico cambia el par.
La unidad hidroneumática incorpora acumulador hidráulico, bomba electrohidráulica y válvulas. Las válvulas ajustables individualmente se montan en pares en cada rueda: válvula de entrada normalmente abierta y válvula de salida normalmente cerrada. Al controlar estas válvulas, la ECU aumenta, disminuye o mantiene una presión constante en las canalizaciones del freno.
En el estado inicial de la unidad hidroneumática, las dos válvulas electromagnéticas y el motor de la bomba hidráulica están vacíos. La cámara del freno está conectada al cilindro maestro a través de la válvula de salida abierta y la válvula de entrada está cerrada.
A presiones de funcionamiento normales (sin «bloque» de la rueda) el líquido de frenos pasa del cilindro maestro a la cámara del freno sin restricción, ya que la presión del líquido en el cilindro y la cámara es igual y proporcional a la cantidad de presión aplicada en el pedal del freno . En este caso, el ABS no afecta el sistema de frenos. Durante un freno de emergencia (posibilidad de “bloqueo” de la rueda), la ECU controla los electroimanes de dos válvulas simultáneamente, lo que hace que funcionen.
La válvula de entrada libera la cámara del freno del cilindro maestro y la válvula de salida la conecta con el acumulador hidráulico, reduciendo así la presión. Simultáneamente, la ECU enciende el motor de la bomba hidráulica para devolver el líquido del acumulador hidráulico en el cilindro maestro. La presión de la cámara del freno continúa disminuyendo. Cuando desaparece la posibilidad de bloqueo de la rueda, la ECU cierra la válvula de salida. La cámara del freno se desconecta del cilindro maestro y del acumulador hidráulico, y la presión en la cámara permanece constante y menor que el cilindro maestro. Cuando aumenta la velocidad de la rueda, la ECU cierra la válvula de entrada que se abre y la cámara del freno se conecta nuevamente al cilindro maestro.
Si la rueda intenta bloquearse nuevamente, se iniciará el siguiente ciclo. La frecuencia del sistema es de 5Hz a 10Hz. Cuando el ABS funciona, la presión promedio en la cámara del freno no depende de la presión aplicada al pedal del freno. Está determinado por la ECU y depende de la condición de la superficie de la carretera. En su configuración completa, el ABS incluye cuatro sensores y cuatro pares de válvulas, lo que permite el control individual de cada rueda para lograr el máximo efecto y permite mantener la distribución diagonal de los actuadores de freno.
Tipos de sensores ABS
Pasiva (analógica) Activo (digital)
Sensor Pasivo
El sensor consiste en una bobina con un núcleo de magnetización. La salida del sensor es CA y genera un pulso de voltaje cada vez que cualquiera de los dientes de la rueda dentada giratoria pasa a través del campo magnético del sensor. La forma de la señal de salida depende de varios factores:
Intensidad del campo magnético interno del sensor;
Número de devanados de la bobina del sensor;
Forma de la rueda dentada giratoria;Distancia entre el sensor y la rueda dentada giratoria;
Velocidad a la que la rueda dentada pasa a lo largo del campo magnético del sensor.
Cada uno de estos factores juega un papel importante en la formación de la señal de salida del sensor. Cuando uno de los dientes de la rueda dentada cae en el campo magnético del sensor, está presente un pico de voltaje positivo en la señal de salida, y después de abandonar el campo magnético está presente un pico de voltaje negativo, igual al positivo. El sensor tiene dos terminales de salida, uno de los cuales está conectado a tierra y el otro (señal) está conectado a la ECU. La señal de salida del sensor depende de la velocidad del automóvil: una velocidad más baja significa una amplitud de salida menor y el período de impulsos es mayor, y opuesto: a mayor velocidad, la amplitud es mayor y el período de pulsos es menor.
Sensor Activo
El sensor ABS activo ofrece la ventaja de poder leer a muy baja velocidad. Los sensores pasivos, normalmente dejan de leer alrededor de tres millas por hora. Los sensores activos más nuevos también pueden determinar la dirección de rotación. Se pueden construir mucho más pequeños que los sensores pasivos. A menudo se incorporan al conjunto de cojinete de rueda. Esto ahorra tiempo de montaje para el fabricante, pero aumenta considerablemente el costo de reparación.
Los frenos con sensores ABS activos producen una onda cuadrada, salida digital. El funcionamiento del sensor activo se puede comparar con el sensor de tipo Hall que se encuentra en los distribuidores, etc. El conjunto de recogida tiene un amplificador incorporado, que produce una señal fuerte incluso a una velocidad muy baja y, por lo tanto, se basa en un voltaje de alimentación, normalmente de 5V, pero Puede ser de 12V. El elemento giratorio consiste en un anillo magnético multipolar (norte-sur, norte-sur), que puede ubicarse en un conjunto giratorio como con el sensor pasivo.
Los polos magnéticos rotativos y alternos generan un flujo magnético dentro del elemento sensor, que luego amplifica y regula la señal para que la ECU la use como información de velocidad de la rueda. La salida de un sensor activo es capaz de enviar información de velocidad de la rueda hasta 0 Km/h, mientras que la precisión del sensor pasivo suele ser dudosa por debajo de 40 km/h
Los sensores activos generalmente tienen tres cables: fuente de alimentación (entrada de referencia), retorno de señal y tierra / blindaje. Pero algunos sensores activos tienen solo dos cables (voltaje de referencia y retorno de señal).
El sensor de angulo de giro de volante es el encargado de monitorear la señal para la determinación del ángulo de dirección, enviándole dicha información a la unidad de control de la columna de dirección a través del CAN-Bus de datos. En la unidad de control electrónica de la columna de dirección se encuentra el analizador electrónico para estas señales.
El sensor de ángulo de dirección va situado detrás del anillo retractor con el anillo colector para el sistema airbag. Se instala en la columna de dirección, entre el mando combinado y el volante.
Componentes
un disco de codificación con dos anillos
parejas de barreras luminosas con una
fuente de luz y un sensor óptico cada una
El disco de codificación consta de dos anillos, el anillo exterior de valores absolutos y el anillo interior de valores incrementales.
El anillo de incrementos está dividido en 5 seg- mentos de 72° cada uno y es explorado por una par de barreras luminosas. El anillo tiene almenas en el segmento. El orden de sucesión de las almenas es invariable dentro de un mismo segmento, pero difiere de un segmento a otro. De ahí resulta la codificación de los segmentos.
El anillo de absolutos viene a determinar el
ángulo. Es explorado por 6 parejas de barreras luminosas.
El sensor de ángulo de dirección puede detectar 1044° de ángulos. Se dedica a sumar los grados angulares. De esa forma, al exceder la marca de los 360° reconoce que se ha ejecutado una vuelta completa del volante.
La configuración específica de la caja de la dirección permite dar 2,76 vueltas al volante de la dirección.
Todas las secuencias de señales de tensión se procesan en la unidad de control para electrónica de la columna de dirección. La medición del ángulo se realiza según el principio de la barrera luminosa.
Si por simplificar la explicación se contempla solamente el anillo de incrementos, se aprecia por un lado del anillo la fuente luminosa y por el otro el sensor óptico. Cuando la luz incide en el sensor al pasar por una almena del anillo se engendra una señal de tensión. Al cubrirse la fuente luminosa se vuelve a interrumpir la tensión de la señal.
Al mover ahora el anillo de incrementos se produce una secuencia de señales de tensión
De esa misma forma se genera una secuencia de señales de tensión en cada pareja de barreras luminosas aplicadas al anillo de valores absolutos. Previa comparación de las señales, el sistema puede calcular a qué grado han sido movidos los anillos. Durante esa operación determina también el punto de inicio del movimiento en el anillo de valores absolutos.
El sensor de velocidad / VSS (Vehicle Speed Sensor) le indica a la computadora información sobre la velocidad del vehículo. El sensor funciona según el principio del efecto Hall y generalmente va instalado en el tacómetro o en la transmision
Tipos de sensores
Sensores de velocidad basados en el efecto Hall
Sensores de velocidad con espiga mecánica
Sensores de velocidad inductivos
Efecto Hall VSS se alimenta con + 12V desde la llave de contacto. Cuando el cable de velocidad del tacómetro gira, el interruptor Hall se enciende y apaga consecutivamente, enviando una señal rectangular a la computadora a bordo. La frecuencia de esta señal indica la velocidad del automóvil.
Sensor de velocidad mecánico La señal de la rueda motriz giratoria tiene una forma rectangular. El voltaje de la señal varía de 0V a +5 V o 0V a un valor cercano al nominal de la batería del automóvil. El ciclo de trabajo de los pulsos es entre 40% y 60%.
Sensor de velocidad inductivo La señal de la rueda motriz giratoria tiene una forma sinusoidal (corriente alternativa). La señal cambia dependiendo de la velocidad de las ruedas como cada sensor inductivo, por ejemplo, el sensor ABS.
Revisar el funcionamiento del sensor VSS
VSS generalmente se encuentra en la transmision.
Revise el conector VSS por corrosión o daños mecánicos.
Asegúrese de que los pines del conector estén firmemente ajustados en sus lugares y si hacen un buen contacto con el sensor VSS.
Retire la cubierta protectora de goma del conector del sensor VSS.
Encuentre la fuente de alimentación, la tierra y los terminales de señal.
Conecte el cable de tierra del osciloscopio a la tierra del chasis.
Conecte el extremo activo de la sonda del osciloscopio al terminal de señal del VSS.
La señal se genera cuando las ruedas motrices del automóvil giran. Esto se puede lograr de las siguientes maneras:
Empuja el auto hacia adelante.
Levante el automóvil en rampa o gato para que las ruedas motrices puedan girar libremente.
El sensor de posición del árbol de levas también se llama sensor de identificación del cilindro o detector de fase de encendido. En los sistemas de inyección de combustible consecutivos, la ECU debe determinar qué cilindro entrará en ciclo de encendido . Esta información se proporciona desde el sensor CMP. Durante la rotación del motor, el sensor envía una señal a la ECU de que el primer cilindro está en el punto muerto superior (PMS). Por lo tanto, se estima la duración de la inyección de pulso
En los sistemas de inyección simultánea de combustible, la ECU no identifica los cilindros y el orden de encendido, ya que esto no es necesario para que el sistema funcione. Cuando aparece una señal de encendido anticipado del cigüeñal o del distribuidor, el cilindro exacto se detecta al reconocer las posiciones mecánicas del cigüeñal, el árbol de levas, las válvulas o el eje del distribuidor.
Tipos de sensores CMP
De acuerdo con su diseño de producción, existen tres tipos diferentes de sensores:
Inductivo Efecto Hall
El sensor de fase de inducción puede estar ubicado dentro del distribuidor o en el árbol de levas. Por lo tanto, cerca del árbol de levas se encuentra un dispositivo con imán permanente. Cada vez que el imán pasa a través del sensor, su campo magnético cambia y el pulso resultante se envía al controlador incorporado para su procesamiento.
El sensor de efecto Hall puede estar ubicado dentro del distribuidor o en el árbol de levas. La pantalla con ranura e imán está montada en el eje. Cuando la pantalla pasa entre el imán y el sensor de pasillo, el sensor se enciende y apaga. Mientras una ranura está frente al sensor, un voltaje regresa al amplificador a través de un tercer cable de señal. Siempre que frente al sensor haya un sector sólido de la pantalla, el voltaje de retroalimentación se interrumpe porque el campo magnético se desvía.
Sincronización del funcionamiento del sensor de posición del árbol de levas y el sensor de posición del cigüeñal
Es muy importante cómo se establecen las señales por fase, entre el sensor CMP y el sensor CKP para vehículos con sistema de inyección. Si las fases no están sincronizadas, el motor y el controlador a bordo pueden entrar en un modo operativo de emergencia con potencia reducida y una mayor concentración de contaminantes en los gases de escape. En el peor de los casos, el motor no arrancará en absoluto.
Las razones del mal momento pueden ser:
Distribuidor ajustado incorrectamente (solo para distribuidores ajustables); correa de distribución floja (una falla común); Mala sincronización .
Verificación del sensor inductivo CMP. Medición con voltímetro y ohmímetro de sensor inductivo –
Mida la resistencia del detector de fase de inducción y compárelo con los datos OEM del fabricante. La resistencia normal debe estar en el rango de 200Ω a 900Ω.
Desconecte el encendido y desconecte el sensor de fase de inducción o el acoplamiento de la ECU.
Conecte un voltímetro entre los dos terminales del sensor o entre las terminales del ECU.
NOTA: Por lo general, se obtienen mejores resultados midiendo el terminal «+», aunque la señal se puede medir en el circuito de puesta a tierra.
Encienda el motor. Debe obtener el valor RMS de la tensión de CA (amplitud de CA, multiplicada por 0,707), no inferior a 0,4 V
Conecte el sensor de fase inductivo o / y el acoplamiento del controlador integrado.
Conecte un voltímetro entre la señal y los terminales de tierra del sensor.
Encienda el motor y lo dejó en ralentí. Debe obtener un valor RMS no menor a 0.75V.
CKP (Crankshaft Position Sensor) , es un sensor electromagnético con la ayuda del cual el sistema de inyección de combustible sincroniza la operación de los inyectores de combustible y el sistema de encendido. El sensor СКР envía la señal de la velocidad y la posición del cigüeñal a la ECU de motor. Esta señal es una serie de pulsos repetitivos de voltaje eléctrico, generados por el sensor cuando el cigüeñal está girando. En base a estos impulsos, la ECU controla los inyectores de combustible y el sistema de encendido.
Tipos de sensores
Inductivo
Efecto sensor Hall
En los inductivos, el elemento sensible tiene un núcleo de magnetización y un devanado conductor de cobre montado en una bobina aislada.
Los sensores Hall utilizan el «efecto hall» que expresa el impacto del campo magnético en el sensor semiconductor. La señal de salida es cuadrada y proporcional a las variaciones que detecta el sensor.
En caso de falla del CKP o la rueda dentada del cigüeñal, ECU registra un evento de falla e ilumina la luz indicadora «CHECK ENGINE»y por consiguiente códigos DTC. Los siguientes síntomas pueden asignarse a fallas de estos elementos:
Ralentí errático
Aumento espontáneo y disminución de la velocidad del motor;
El motor se detiene;
El motor no arranca;
Bajo rendimiento del motor;
Golpear durante la aceleración;
Fallo de encendido del motor.
Procedimiento para verificar la condición de CKP
Realice una inspección visual externa del CKP y la rueda dentada del cigüeñal.
Revise el arnés CKP por corrosión y daños.
Asegúrese de que los pasadores del arnés estén apretados en sus lugares y que haya un buen contacto eléctrico.
Verifique que el espacio de aire entre la rueda dentada y el sensor CKP esté dentro de los límites.
Desconecte el arnés del sensor.
Mida con un ohmímetro la resistencia activa entre los terminales del CKP. Verifique en la base de datos proporcionada por OEM cuál debería ser el valor de la resistencia medida del sensor para la marca y modelo del automóvil correspondiente. Si la lectura muestra una resistencia extremadamente alta, esto significa que hay un circuito abierto en el sensor. La indicación de cero o cerca de cero significa cortocircuito en la bobina.
Revise con osciloscopio la señal de onda otorgada, las ondas correctas se muestran de la siguiente manera
NOTA: Independientemente de la resistencia medida dentro de los límites aceptables, no se puede tomar como evidencia de que el CKP podrá producir una señal correcta.
CKP puede tener cable blindado (no en todos los casos). Pele el acoplamiento del arnés.
Conecte una de las sondas de ohmímetro a uno de los terminales del СКР (1 o 2).
Conecte la otra sonda al terminal que corresponde al blindaje. La lectura debe inclinarse a una resistencia infinita.
Mueva la sonda desde el terminal de pantalla y conéctela a tierra. La lectura debe inclinarse hasta el infinito. Nota: En algunos sistemas, el cable blindado CKP está conectado a su cable de retroalimentación CKP a tierra. En este caso, el ohmímetro leerá cortocircuito, lo cual será normal para este sistema. verifique el circuito eléctrico del sistema que está probando para identificar cómo está conectado exactamente el CKP.
El sensor de temperatura es un elemento sencillo ya que es una resistencia de temperatura variable, que generalmente tiene un coeficiente de temperatura negativo y su función principal es monitorear la temperatura del refrigerante del motor para procesar la información y realizar acciones tales como activar ventiladores, determinar acciones como encender la luz de temperatura en el tablero o check engine.
Es un termistor de dos hilos sumergido en refrigerante y mide su temperatura. La ECU utiliza la señal de ECT (Engine Coolant Temperature Sensor) como el principal factor de corrección al calcular el avance del encendido y la duración de la inyección.
El proceso de transformación de la variación de resistencia de ECT en variación de voltaje, que es procesada por la ECU, el sensor de ECT está conectado en un circuito típicamente alimentado con un voltaje de referencia de + 5V.
En un motor frío y una temperatura ambiente de 20 ºC, la resistencia del sensor está entre 2000 y 3000 Ω. Después del arranque del motor, la temperatura del refrigerante comienza a aumentar. La TEC se calienta gradualmente y su resistencia se reduce proporcionalmente. A 90 ºC, su resistencia está en el rango de 200Ω a 300Ω.
De este modo, se envía una señal de voltaje variable dependiente de la temperatura del refrigerante a la computadora a bordo.
PROCESO DE DIAGNOSTICO DEL SENSOR DE TEMPERATURA
Ubique las conexiones del sensor con un diagrama eléctrico preferentemente
Conecte el cable negativo del voltímetro a la tierra del chasis.
Identifique cual es la señal y los terminales de tierra.
Conecte el cable positivo del voltímetro al terminal de señal ECT.
Arranque el motor .
Dependiendo de la temperatura, las lecturas de voltaje deben estar en el rango de 2V a 3V. La relación entre el voltaje y la temperatura
Compruebe si la señal de voltaje ECT corresponde a la temperatura. Necesitará un termómetro para este propósito.
Arranque el motor y llegue hasta a la temperatura de funcionamiento. Durante el calentamiento del motor, el voltaje debe disminuir
El problema común es que la resistencia de salida (y el voltaje) cambian incorrectamente más allá de su rango normal. El valor normal del voltaje del sensor ECT es 2V en el motor frío y 0.5V en el motor caliente. Un sensor de defectos puede indicar un voltaje de 1.5V en el motor frío y 1.25V en el motor caliente, causando dificultades para arrancar un motor frío y la presencia de una rica mezcla de combustible cuando el motor está caliente. Esto no generará ningún código de falla (si el controlador integrado no está programado para detectar cambios de voltaje) ya que el sensor continúa operando dentro de sus parámetros de diseño. Si se encuentra dicho defecto, se debe reemplazar el sensor ECT.
Si la señal de voltaje ECT es igual a 0V (falta de suministro de energía o hay un cortocircuito a tierra) o si es 5.0V, tenemos un circuito abierto.
En los motores de alta relación de compresión, el tiempo óptimo de encendido (a velocidades del motor más altas que las de ralentí) está muy cerca de la aparición de detonaciones del motor. Esta proximidad significa que existe la posibilidad de detonar en algún punto del ciclo de operación del motor, en algunos cilindros. La detonación puede ocurrir en cualquier momento y la ECU se encarga de su control. Durante la combustión, la ECU identifica el cilindro o cilindros exactos con detonación
Funcionamiento el knock sensor o sensor de detonación (KS) es un sensor piezoeléctrico instalado en el bloque del motor y reacciona a las vibraciones de sonido del motor. La señal del sensor se convierte en un voltaje proporcional al nivel de detonación y se alimenta a la computadora a bordo para su posterior procesamiento.
La frecuencia de la detonación está generalmente en el rango de 6 kHz a 15 kHz. La computadora a bordo analiza la detonación de cada cilindro y utiliza un algoritmo complejo para comparar su nivel con el nivel de ruido promedio de los períodos anteriores preestablecidos. Si el ruido excede el nivel promedio con un cierto valor, la computadora a bordo detecta una detonación.
Inicialmente, el tiempo de encendido se basa en un valor de referencia. Cuando se detecta la detonación en algunos de los cilindros, el controlador a bordo disminuye el tiempo con unos pocos grados. Una vez que desaparece la detonación, se aumenta el tiempo hasta que alcanza su valor base o hasta que se produce la siguiente detonación. Este es un proceso continuo, que proporciona una sincronización óptima para cada cilindro.
Procedimiento para verificar la funcionalidad de KS
Conecte la sonda de un estroboscopio inductivo al primer cilindro
Conecte los terminales KS a un voltímetro de CA.
Arranque el motor y lo dejó en ralentí.
Golpee ligeramente el bloque de cilindros del motor cerca del primer cilindro.
El avance debe intentar retrasarse y el voltímetro debe leer un voltaje pequeño (aproximadamente 1V).
el sensor IAT (Intake Air Temperature) es un termistor de dos cables y mide la temperatura en el colector de admisión. La densidad del aire es inversamente proporcional a la temperatura. Por lo tanto, la señal del sensor IAT indica un cálculo más preciso de la masa de aire aspirado por el motor.
Funcionamiento
El voltaje de referencia de + 5V se aplica al sensor en circuito abierto y la conexión a tierra es a través de la retroalimentación del sensor. El voltaje variable de la temperatura del aire se alimenta al controlador a bordo.La ubicación del sensor IAT es importante para el rango de temperatura. Según las características estructurales del vehículo, el sensor IAT lo podemos encontrar en:
En el colector de admisión;
En la caja del filtro de aire;
Dentro del MAF.
La señal de temperatura del aire varía significativamente desde el arranque del motor frío y caliente y desde la ubicación del sensor IAT. Si el sensor IAT está en el colector de admisión o en la caja del filtro de aire, la temperatura medida dependerá del compartimento del motor con un rango de 20ºС a 40ºС. Si se encuentra en el colector de admisión o en el cuerpo del acelerador (en algunos sistemas SPi), el rango de temperatura puede ser mucho mayor, alcanzando 70ºС cuando el motor está caliente. Algunos automóviles usan dos sensores: primero mide la temperatura del compartimento del motor y luego mide la temperatura ambiente. Esto es especialmente útil si el automóvil cuenta con turbo compresor
En la mayoría de los casos, se utilizan sensores ATS de coeficiente de temperatura negativo. Pero en algunos sistemas Renix se pueden ver sensores con un coeficiente de temperatura positivo.
Orden para verificar la funcionalidad del sensor IAT —Sensor negativo de coeficiente de temperatura IAT—
El sensor IAT reduce su resistencia al aumentar la temperatura.El sensor IATpuede ubicarse dentro del cuerpo MAF o en el colector de admisión.Si está dentro del MAF, usa el mismo cable a tierra que el sensor MAF. Ambos son sensores de dos cables y las operaciones de verificación son similares. Conecte el terminal negativo del voltímetro a la tierra del chasis.
Determine la señal y los terminales de tierra.
Conecte la sonda del voltímetro positivo al cable de señal del sensor. (IAT se encuentra en la caja del filtro de aire).
Encienda el encendido pero no arranque el motor.
El valor de voltaje debe estar en el rango entre 2V a 3V dependiendo de la temperatura.
El voltaje cambiará de acuerdo con la temperatura del aire dentro del múltiple de admisión. Cuando el compartimento del motor o la temperatura del múltiple aumentan, el voltaje disminuye. Cuando el motor está frío, la temperatura del aire corresponde a la temperatura ambiente. Después del arranque del motor, las temperaturas del compartimento del motor y del colector aumentan y la temperatura del colector puede elevarse a 70ºC ¸80ºC, lo que supera significativamente la del compartimento del motor.
Si las mediciones tienen que tomarse a diferentes temperaturas, el sensor IAT puede calentarse con un secador de aire o enfriarse con un enfriador por aspersión. Calentar y enfriar el sensor también cambiará su resistencia y voltaje.
Verifique si el voltaje de salida del sensor corresponde a su temperatura
El sensor MAF (mass air flow) que mide la cantidad de aire aspirado por el motor para controlar la necesidad de combustible y el nivel de gases emitidos.
El caudalímetro, también conocido como debímetro, es el elemento encargado de medir la masa de aire que entra en el colector de admisión desde el exterior, información que, por medio de una conexión eléctrica, envía a la centralita del automóvil.
Este aparato, similar a un anemómetro, es igualmente útil en vehículos con motorización diesel y gasolina y suele ir ubicado a la salida del filtro de aire, en el tubo de admisión, que es la canalización que conduce el aire ya filtrado a los cilindros.
Tradicionalmente, cuando se paraba el motor, los caudalímetros creaban un efecto de pirolisis por medio de un hilo térmico que elevaba la temperatura hasta eliminar las sustancias que podían alterar su funcionamiento.
Hoy en día, en los vehículos modernos, son más populares los caudalímetros HMF o LMS que funcionan a través de película caliente.
El funcionamiento de MAF se basa en el principio de temperatura constante.
El alambre de platino calentado, suspendido en la corriente de aire del motor (3), es una de las patas de un puente de Wheatstone. La temperatura constante de aproximadamente 100 ºС se mantiene aumentando o disminuyendo la corriente eléctrica que fluye a través del circuito mientras el flujo de aire entrante enfría el cable.
Al aumentar el flujo de aire, el alambre de platino se enfría y su resistencia disminuye. El puente de resistencia de Wheatstone es asimétrico y aparece un voltaje que se envía a un amplificador y se dirige a elevar la temperatura del cable. Este proceso continúa hasta que la temperatura y la resistencia del conductor no conducen al equilibrio del sistema.
El rango actual es 0.5A – 1.2А.Esta corriente también fluye a través de una resistencia de calibración y forma una caída de voltaje que ingresa al controlador de a bordo para calcular la cantidad de combustible inyectado. Los cambios de temperatura son compensados por la resistencia (4), que es un anillo de platino, suspendido en la corriente de aire. Los cambios de temperatura influyen simultáneamente tanto en el conductor de resistencia calentado (2) como en la resistencia de compensación de temperatura (4) y, por lo tanto, el puente de resistencia Wheatstone permanece equilibrado.
Durante el funcionamiento, el cable de platino contamina inevitablemente. Para evitar la contaminación después de apagar el motor, el cable se calienta a una temperatura de 1000 º C durante 1 segundo. Por lo tanto, se quema toda la suciedad que se adhiere al cable. Este proceso es controlado por el controlador integrado.
Sensor MAF que mide la masa del flujo de aire – Sensor de película caliente (HFM)
Los sensores MAF de película caliente funcionan de manera muy similar a un sensor de alambre caliente, y utilizan una película calentada centralmente o un elemento metálico tipo rejilla. Un lado de la película encuentra un flujo de aire de enfriamiento, mientras que la parte trasera protegida mantiene una temperatura constante, y el diferencial de corriente entre los dos se mide y transmite como una salida de frecuencia digital de onda cuadrada, entre alrededor de 30Hz en ralentí y 150Hz en el acelerador completamente abierto. . Los sensores de película caliente tienden a ser más robustos y menos susceptibles a la contaminación que los tipos de alambre caliente
El sensor MAF para consumo de volumen de aire – sensor MAF
Los sensores para el consumo de volumen de aire tienen una barrera de aire (4) equipada con un resorte de retorno. Esta barrera se coloca en el flujo de aire consumido por el motor y se mueve proporcionalmente al aumentar o disminuir el flujo de aire.
El sensor también está equipado con una barrera adicional (2), que sirve no solo para el equilibrio sino también como amortiguador contra las fluctuaciones.La barrera está conectada mecánicamente al limpiador del potenciómetro (3). La tensión de alimentación se alimenta al potenciómetro. Su voltaje de salida depende de la posición de la posición de barrera y la posición de la barrera en sí depende del volumen del flujo de aire.
El potenciómetro de medición del sensor está hecho sobre un sustrato cerámico. Los terminales de la resistencia del divisor de voltaje están hechos en el sustrato y están dispuestos en una fila y cubiertos con una capa resistiva.
El limpiador de potenciómetro se presiona contra la capa resistiva de contacto y debido al contacto eléctrico entre el limpiador y el voltaje del limpiador de capa resistiva siempre es igual al voltaje en el punto de contacto con la capa resistiva. El limpiador del potenciómetro está conectado mecánicamente a la barrera móvil del flujo de aire y cada vez que se cambia la posición de la barrera también se mueve en contacto constante a lo largo de la capa resistiva, arrastrándose sobre ella.
Estos cambios en contacto constante a lo largo de la capa resistiva desgasta el potenciómetro, lo que con el tiempo provoca daños en el potenciómetro de medición. En consecuencia, el deterioro en algunos lugares del contacto, la capa resistiva desaparece dejando solo el sustrato cerámico. Mover el limpiaparabrisas en un área tan desgastada provoca un contacto eléctrico inestable o incluso perdido y el voltaje de salida del potenciómetro ya no se corresponderá con la posición de la barrera móvil.
En caso de una contaminación o falla grave del filtro de aire, los canales de aire del sensor de flujo de aire de volumen pueden contaminarse mucho. Por lo tanto, la barrera móvil puede quedar atascada de vez en cuando o incluso completamente atascada. Por lo tanto, la señal de salida ya no se corresponderá con el flujo de aire real.
La desventaja del sensor de volumen de flujo de aire es que mide el volumen del aire entrante. Por lo tanto, es necesario calcular la cantidad de combustible para determinar la masa de aire y así ajustar las lecturas del sensor de acuerdo con la densidad del aire. La solución a este problema es colocar un sensor de temperatura adicional junto con el sensor de volumen de aire
La señal de salida de MAF, realizada por BOSCH, es un voltaje variable en el rango de 1 a 5V, cuyo valor depende de la masa de flujo de aire a través del sensor. Con flujo de aire cero (motor parado) el voltaje de salida del sensor debe ser igual a 0.98V – 1.02V. De lo contrario, el sensor se considera dañado. El aumento del flujo de aire conduce al aumento de la tensión de salida del sensor. Este sensor también puede detectar los flujos de aire inversos desde el colector de admisión al filtro de aire. El voltaje de salida en este caso se redujo por debajo de 1V, proporcional al tamaño del flujo de aire de retorno.
Problemas generales con los sensores MAF: La señal de salida no cambia con la variación del flujo de aire de admisión.Desviación del valor de la señal de salida del correcto.Reducción de la velocidad de respuesta del sensor. En este caso, el motor perdió significativamente su «agilidad» y se está volviendo difícil arrancar el motor cuando está frío. Reducción de la velocidad de reacción en caso de contaminación de la resistencia de calentamiento y los dos sensores de temperatura.
Descripción general El sensor de Oxigeno O2, también llamado sonda lambda, es el encargado de monitorear el nivel de oxígeno en los gases de escape y se encuentra situado en el escape del motor. La señal de un mal funcionamiento del sensor lambda es el aumento del consumo de combustible, la reducción de la dinámica del vehículo, la pérdida de potencia del motor, el ralentí irregular o la velocidad de ralentí incorrecta.
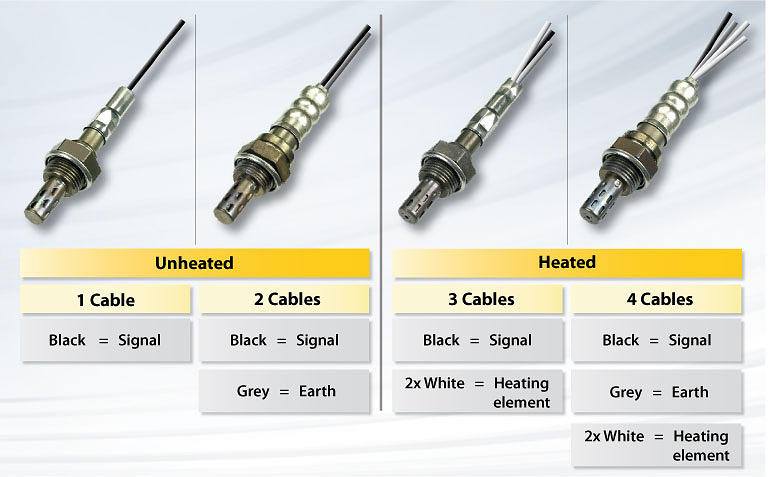
Colores típicos de los cables del sensor О2 Rojo – señal (final activo) Gris – tierra del sensor Blanco (dos piezas) – fuente de alimentación del calentador de 12V
Al analizar las formas de onda de funcionamiento del sensor lambda en diferentes modos de funcionamiento del motor, se puede evaluar el funcionamiento del sensor en sí, así como el funcionamiento del sistema de gestión del motor en general
Funcionamiento
Los motores de gasolina requieren de la mezcla estequimetrica de aire y combustible para su correcto funcionamiento, se llama estequiométrica y es exactamente 14.7: 1. Esto significa que una partícula del combustible debe mezclarse con 14,7 partículas de aire. En el auto, esta proporción de aire-combustible es la ideal para el correcto funcionamiento del auto y varía según el modo de funcionamiento del motor y la formación de la mezcla.
El valor de exceso de aire – L (lambda) caracteriza qué tan lejos está la mezcla real de combustible-aire de la estequiométrica (14.7: 1). Esta mezcla se considera óptima y en este caso L = 1. Si L <1, tenemos falta de aire y la mezcla se enriquece. Cuando L = 0.85 – 0.95 se incrementa la potencia del motor. Si L> 1, hay un exceso de aire y la mezcla se inclina. La potencia del motor baja cuando L = 1.05 – 1.3, pero la economía aumenta. En L> 1.3 la mezcla se vuelve imposible de encender y se produce un fallo de encendido del motor. Los motores de gasolina alcanzan su potencia máxima cuando hay una falta de aire del 5-15% (L = 0.85 – 0.95), y se logra un consumo mínimo de combustible con un exceso de aire del 10 – 20% (L = 1.1 – 1.2).
Cuando el motor está funcionando, la proporción L varía constantemente en el rango 0.9 – 1.1 y este es el rango operativo de regulación lambda. Cuando el motor se calienta a su temperatura de funcionamiento y no está cargado (es decir, al ralentí), mantener la igualdad L = 1 es esencial para que el convertidor catalítico cumpla por completo su propósito y reduzca al mínimo las emisiones del vehículo.
El sensor de oxígeno está montado en el colector de escape para que los gases de escape puedan estar en la línea de flujo de su superficie de trabajo. En efecto, el sensor de oxígeno es una fuente de corriente galvánica, que cambia su voltaje de salida de acuerdo con la temperatura y el contenido de oxígeno del ambiente. Dependiendo de la concentración de oxígeno de los gases de escape, aparece una señal de salida diferente. La forma de esta señal depende del tipo de material del que está hecho el sensor. Por lo tanto, el sensor de oxígeno informa a la ECU la cantidad de oxígeno en los gases de escape.
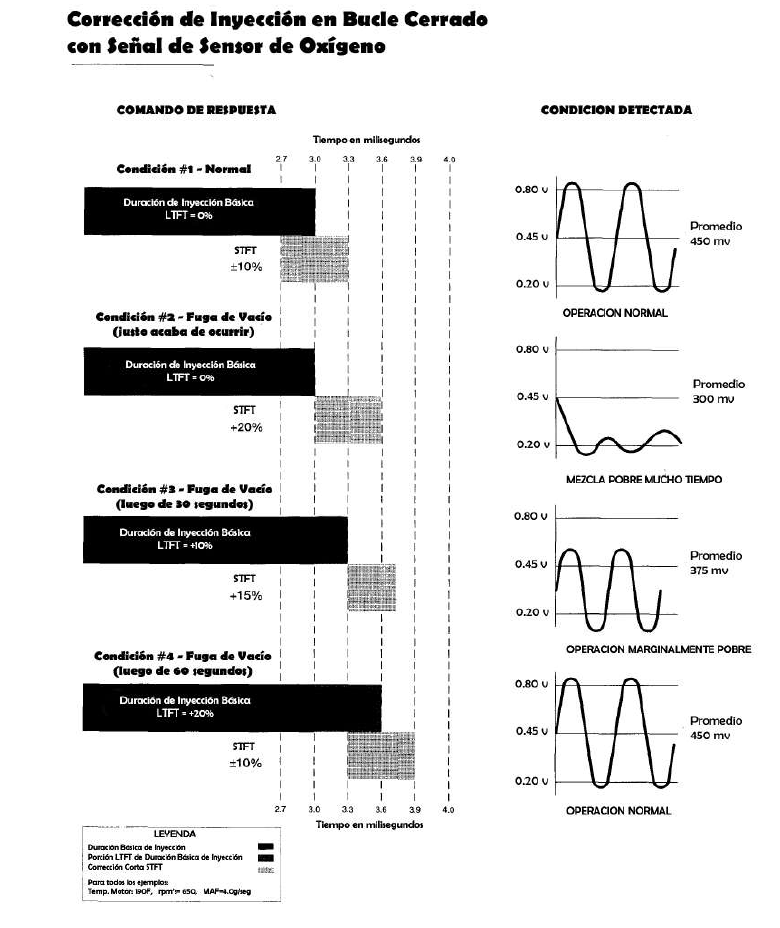
La ECU recibe la señal del sensor de oxígeno, lo compara con un valor almacenado en su memoria y si la señal difiere del óptimo para el modo actual, ajusta la duración de la inyección de combustible en ambas direcciones. Así, mediante la implementación de una retroalimentación y un modo de operación correcto, se logra una economía de combustible máxima y gases nocivos mínimos.
Procedimiento de pruebas al sensor de Oxigeno
Identificar las terminales.
El sensor puede tener uno, dos, tres o cuatro terminales según el sistema que se esté probando:
Calentador del sensor de oxígeno a tierra (blanco); Potencia positiva del calentador del sensor de oxígeno (blanco); Señal de sonda lambda (generalmente cable negro);
Sonda lambda molida (generalmente gris).
Verifique el calentador del sensor de oxígeno, si está presente. Verifique que el suministro del calentador sea igual al de la batería del automóvil – 12V. Si no hay voltaje, verifique los cables al relé de la llave de encendido. Verifique la conexión del calentador del sensor de oxígeno al suelo.
Arranque el motor y caliéntelo hasta su temperatura de funcionamiento.
Mantenga la velocidad del motor a 3000 rpm durante 30 segundos. Esto aumentará la temperatura del sensor, es decir, se encenderá.
Mantenga la velocidad del motor a 2500 rpm. Si el motor está en ralentí durante un largo período de tiempo, el sensor de oxígeno se enfriará y se apagará.
Nota: esta prueba no se puede realizar con un termostato defectuoso.
Determine el tipo de sensor de oxígeno: circonio, titanio o banda ancha.
Verifique la señal de salida del sensor de oxígeno. Sensor de circonio antes del convertidor catalítico.
NOTA: El voltímetro digital leerá un voltaje promedio, por ejemplo 450mV. El sensor de oxígeno «lento» puede encenderse correctamente y aún no notar que el voltaje es un poco más alto. En la mayoría de los casos, el osciloscopio es el instrumento más apropiado para encontrar fallas. No es apropiado usar un voltímetro o un lector de códigos de falla. Si el sensor funciona correctamente, cuando el motor está en modo inactivo, en la pantalla del osciloscopio se pueden ver fluctuaciones constantes, cercanas a la forma de onda sinusoidal con frecuencia 1Hz ÷ 5Hz. El valor más pequeño de la señal es 0.1V y el valor máximo es 0.9V. El nivel promedio de fluctuaciones será de alrededor de 0.45V. La duración de los bordes de la señal no es superior a 250 ms. La misma señal pero con una frecuencia más alta debe observarse a velocidades más altas del motor.
Sensor de circonio después del convertidor catalítico. Con un convertidor catalítico que funcione correctamente, la señal del sensor de oxígeno será una línea recta en el nivel 0.5V … 0.6 V. El voltaje de salida también se puede medir con un voltímetro digital. Si la señal varía y tiene una forma cercana a la señal del sensor antes del convertidor catalítico, esto significa que el convertidor catalítico no funciona correctamente.
Sensor de titanio antes del convertidor catalítico. Si el sensor funciona correctamente, cuando el motor está en modo inactivo, se pueden ver fluctuaciones de señal en el rango de 0.2V a 4.5V, y con bordes más pronunciados en comparación con los del sensor de circonio. El voltímetro digital leerá un voltaje promedio de alrededor de 2V.
Sensor de oxígeno de banda ancha
A diferencia de los sensores de banda estrecha que se comunican con la computadora por medio de un voltaje en un solo cable, el sensor de banda ancha usa dos cables y envía señales a la computadora por medio de un flujo de corriente. Una relación aire / combustible de 14.7 a 1 se considera la relación aire / combustible óptima o mezcla estequometrica . Cuando la relación está por encima de este valor, la corriente fluye en una dirección, y cuando está por debajo de este valor, fluye en la otra. Cuando la relación aire / combustible es exactamente 14.7 a 1, la corriente no fluye en absoluto. Para indicar un aumento de las condiciones de riqueza o escasez, el flujo de corriente aumenta en proporción a cuán rica o pobre es la proporción aire / combustible.
Los voltajes en estos cables de bomba de corriente varían de un fabricante a otro. Uno de los 2 cables de corriente tendrá un voltaje suministrado al sensor por la ECU. El otro cable será un cable de retorno del sensor a la ECU. Los autos Toyota tienen 3.0 voltios en su cable de referencia y 3.3 voltios en el cable de retorno de corriente. Los 3.3 voltios varian ligeramente a medida que fluya la corriente, pero estos cambios son muy pequeños. Del mismo modo, Nissan usa 2.7 voltios en su cable de referencia, y el cable actual es de aproximadamente 3.0 voltios. Hasta ahora, en todos los sensores de banda ancha de 4 cables que hemos visto, la diferencia entre los 2 cables de la bomba de corriente ha sido de .300 (300 milivoltios) nominales, que fluctúa ligeramente en función del flujo de corriente.
Hay otro tipo de sensor de banda ancha que usa 5 cables y, a veces, 6 cables (raro). En este caso hay un quinto cable que proporciona una representación de voltaje del flujo de corriente en los cables de la bomba de corriente. Cuando se usa un quinto cable de esta manera, generalmente se llamará «cable de señal». Las versiones de 6 cables también proporcionan una referencia de tierra para el cable de señal. En ambos casos, hay circuitos para convertir el flujo de corriente en los cables de la bomba de corriente en voltaje.
Pero este tipo todavía usa el par de cables de la bomba actual para controlar el voltaje en el quinto cable. • Sujete el cable positivo del multímetro al terminal del cable de señal en el sensor. El terminal del cable de señal es el tercero desde el lado (en medio de los cinco terminales). • Sujete el cable negativo del multímetro a un punto conectado a tierra. Un punto conectado a tierra puede ser el terminal negativo de la batería o la superficie metálica del colector o motor. • Encienda el motor y permita que el vehículo funcione en ralentí durante un minuto. • Monitorear el multímetro; Debería ver una lectura entre 1 y 5 voltios. Si no estás leyendo; El sensor está defectuoso y debe ser reemplazado.
Señales con Osciloscopio
Debemos de chequear que los picos de voltaje estén entre 0.2 a 0.8 voltios , también con el multímetro.
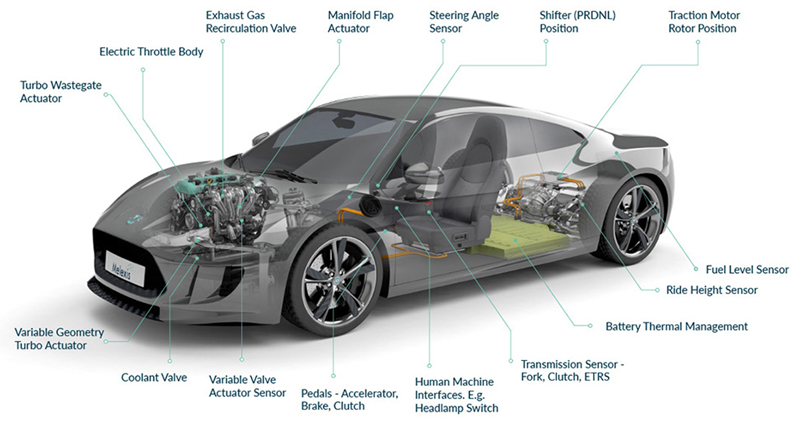
Los sensores son, en cierto modo, los órganos sensoriales del vehículo. Componente fundamental de los sistemas de control electrónico, deben registrar variables físicas o químicas y convertirlas en señales eléctricas…
Función
Los sensores son, en cierto modo, los órganos sensoriales del vehículo. Componente fundamental de los sistemas de control electrónico, deben registrar variables físicas o químicas y convertirlas en señales eléctricas.
TIPOS DE SENSORES
En los últimos años, ha habido una explosión en el número de diferentes tipos de sensores. Se han descubierto muchos tipos nuevos de sensores, especialmente en el ámbito de la electrónica de seguridad y confort. Básicamente, los sensores se pueden clasificar de la siguiente manera:
Sensores de posición (sensores de distancia/ángulo)
Los sensores de posición se utilizan para capturar la posición de
la válvula de mariposa,
del pedal del acelerador o del freno,
de la distancia y posiciones angulares en bombas de inyección diesel,
del nivel de llenado en el depósito de combustible,
del ángulo de dirección,
del ángulo de inclinación, etc.
A esta categoría también pertenecen los sensores ultrasónicos y de radar utilizados para determinar la distancia a los obstáculos en los modernos sistemas de asistencia al conductor.
Sensores de velocidad y velocidad.
Los sensores de velocidad y velocidad se utilizan para determinar
la velocidad de los cigüeñales,
árboles de levas y
bombas de inyección diesel o
velocidades de las ruedas.
Los sensores de velocidad de guiñada también pertenecen a esta categoría. Detectan el movimiento de rotación del vehículo alrededor de su propio eje y son necesarios para el ESP.
Sensores de aceleración
Los sensores de aceleración registran la aceleración de la carrocería del automóvil y se utilizan en sistemas de seguridad pasiva (airbags, tensores de cinturones de seguridad, barras antivuelco) y sistemas de estabilidad de conducción como ABS y ESP, así como en el control del chasis.
Sensores de presión
Los sensores de presión se utilizan para capturar una amplia variedad de presiones, incluidas
presión de succión o carga,
presión de combustible, presión de frenos,
presión de los neumáticos,
presión del depósito hidráulico (para ABS y dirección asistida),
presión del refrigerante (sistema de aire acondicionado),
presión de modulación (transmisión automática), etc.
Sensores de temperatura
Los sensores de temperatura se utilizan para registrar temperaturas, p. en el contexto de la medición
temperatura del aire de succión o carga,
temperaturas ambiente e interior,
temperatura del evaporador (sistema de aire acondicionado),
temperatura refrescante,
temperatura del aceite del motor,
temperatura del aire de los neumáticos, etc.
Sensores de fuerza y par
Los sensores de fuerza y torsión se utilizan para medir fuerzas como
fuerza del pedal,
conducir,
fuerzas de par de freno y dirección o
el peso de los ocupantes de un vehículo (para sistemas de retención adaptativos).
Medidores de flujo
Los medidores de flujo se utilizan para capturar el requerimiento de combustible y la cantidad de aire aspirado por el motor.
Sensores de gases
Los sensores de gas detectan la composición de los gases de escape (sensor de oxígeno, sensor de NOx) o detectan sustancias peligrosas en el aire fresco.
EJEMPLOS DE SENSORES PARA CONTROL DE MOTOR:
Sensor de pulso, cigüeñal
El sensor del cigüeñal capta la velocidad del motor y la posición del cigüeñal. La unidad de control utiliza estos valores para calcular el impulso de inyección y el impulso de encendido.
Posición del árbol de levas
El sensor del árbol de levas está situado en la culata y detecta una corona dentada en el árbol de levas. Esta información se utiliza, por ejemplo, para el inicio de la inyección, para la señal de activación de la electroválvula del sistema de inyección bomba/boquilla y para el control de detonación específico del cilindro.
Medidor de masa de aire
El medidor de masa de aire está instalado entre la carcasa del filtro de aire y el colector de admisión. Mide la masa de aire aspirada por el motor. Esta variable proporciona la base para calcular la cantidad de combustible que se debe suministrar al motor.
Temperatura del aire de admisión/Temperatura exterior/Temperatura interior
Los sensores de temperatura del aire captan la temperatura del aire ambiente. Los valores medidos se utilizan para controlar distintos sistemas (p. ej., el sistema de aire acondicionado) o como valores de corrección para el sistema de inyección. El lugar de instalación está determinado por la temperatura del aire a medir. El sensor para la temperatura del aire aspirado se encuentra, por ejemplo, en el conducto de aire aspirado.
Temperatura refrescante
El sensor de temperatura del refrigerante está atornillado al sistema de refrigeración. La punta del medidor penetra en el refrigerante y registra su temperatura. La centralita utiliza este valor para adaptar la cantidad de combustible inyectada a la temperatura del motor.
La posición del acelerador
Los sensores de la válvula de mariposa están conectados al eje de la válvula de mariposa. Controlan el ángulo de apertura de la válvula de mariposa. A partir de estos valores, la electrónica del motor calcula en función de otros factores la cantidad de combustible inyectada.
Sensores de golpe
El golpeteo es una forma incontrolada de combustión en un motor de gasolina. Como los golpes continuos pueden dañar el motor, es necesario comprobarlos y regularlos. La unidad de control del motor evalúa las señales de voltaje recibidas del sensor de detonación y regula el punto de ignición en un rango justo por debajo del llamado límite de detonación. Los sensores de detonación son monitoreados permanentemente por la unidad de control.
Presión del tubo de admisión
El sensor de presión del tubo de admisión mide el vacío del tubo de admisión detrás de la válvula de mariposa y transmite este valor como señal eléctrica a la unidad de control del motor. Esto se combina con el valor del sensor de temperatura del aire para poder calcular la masa de aire aspirada.
Sensores de oxígeno
El sensor de oxígeno mide el contenido de oxígeno residual en los gases de escape para garantizar una mezcla de combustión óptima en todo momento. Dependiendo del tipo de sensor, un elemento químico (dióxido de titanio/dióxido de circonio) y el contenido de oxígeno residual de los gases de escape polarizan una tensión que luego es utilizada por la unidad de control como magnitud de medición.
EJEMPLOS DE SENSORES DE LA ELECTRÓNICA DE LA CARROCERÍA:
Velocidad de la rueda
La velocidad de la rueda la utilizan los sistemas de seguridad de conducción como ABS y ASR como valor de velocidad, así como los sistemas GPS para calcular la distancia recorrida. Una falla provocará que estos sistemas fallen, lo que afectará significativamente la seguridad.
Velocidad, transmisión
El sensor de transmisión registra la velocidad de transmisión. La unidad de control utiliza la señal de velocidad para controlar con precisión la presión de cambio durante el cambio y para decidir qué marcha se debe engranar y cuándo.
Velocidad, distancias recorridas
Los sensores de distancia se utilizan para capturar la velocidad de conducción. Se montan en la transmisión o en el eje trasero. La información obtenida es necesaria para el velocímetro, el control de crucero y el control de deslizamiento del convertidor.
Nivel de aceite del motor/Nivel de refrigerante
Por razones de seguridad operativa y para mayor comodidad, los niveles como el aceite del motor, el líquido refrigerante y el líquido lavaparabrisas se controlan mediante sensores de nivel. Los sensores de nivel envían una señal a la unidad de control del motor que activa una lámpara indicadora.
Desgaste de los forros de freno
Los sensores de desgaste de los frenos están ubicados en las pastillas de freno y están sujetos al mismo desgaste. Una señal visual indica al conductor que se ha alcanzado el límite de desgaste.
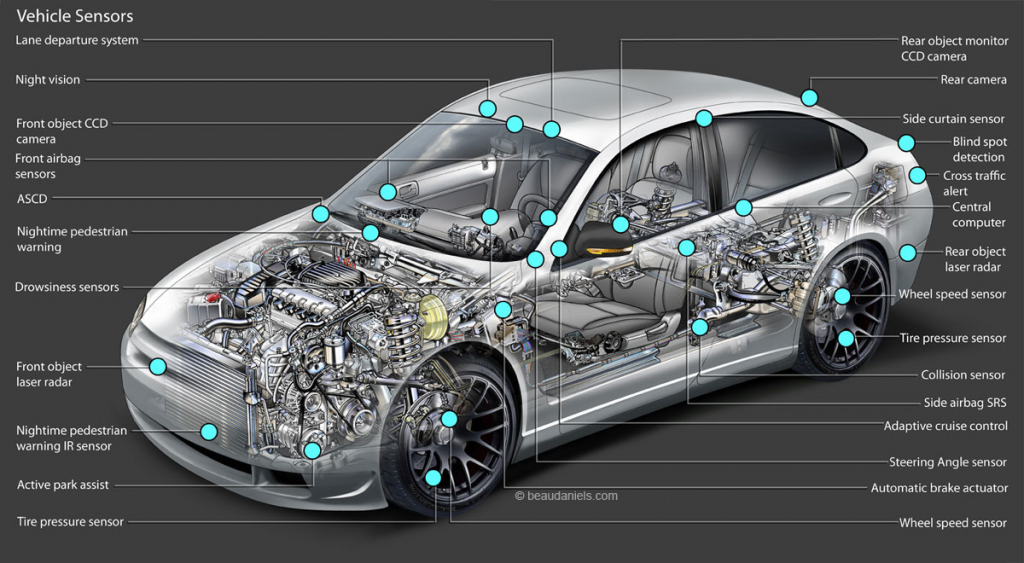
Seguridad
La información de los sensores constituye la base para el funcionamiento de numerosos sistemas de seguridad activos y pasivos. Gracias a los importantes avances en el desarrollo de nuevos sensores, en los últimos años se ha producido un aumento constante de las capacidades de los sistemas de seguridad y asistencia al conductor. Por tanto, los sensores desempeñan un papel clave a la hora de aumentar la seguridad en nuestras carreteras.
Algunos de los sistemas de seguridad son
Sistema para evitar colisiones frontales –
Alerta al conductor cuando el vehículo se acerca a otro vehículo que le precede. Emplea varios sensores como cámaras, RADAR o LIDAR para detectar los objetos u otros vehículos que se encuentran delante del vehículo. Un sistema de advertencia de colisión frontal provisto de frenado autónomo puede reducir la velocidad del vehículo, mitigando así el efecto de la colisión.
Control de crucero adaptativo –
El control de crucero adaptativo mantiene la velocidad preestablecida del vehículo. Automáticamente desacelera el vehículo en tráfico pesado para mantener una distancia segura. Los sensores montados en la parte delantera registran la distancia con el vehículo delantero. El vehículo acelera para mantener la velocidad de crucero preestablecida a medida que el tráfico aumenta la velocidad.
Sistema de advertencia y prevención de cambio de carril –
Este sistema emplea cámaras para rastrear la posición del vehículo dentro del carril y alertar al conductor si el vehículo está en peligro. Ciertos sistemas ofrecen advertencias hápticas, como vibraciones del asiento o la dirección, mientras que otros brindan advertencias audibles y/o visuales.
Sistema de detección de puntos ciegos –
Este sistema de red de sensores monitorea los puntos ciegos en las áreas delantera, lateral y trasera del vehículo. La mayoría de los sistemas proporcionan alertas visuales que aparecen en o cerca de los espejos laterales al detectar el punto ciego.
Se activa una alerta audible cuando el conductor señala un giro y el vehículo se dirige hacia el punto ciego en el lado de giro.
Ciertos sistemas también pueden activar los controles de dirección o el freno para mantener el vehículo en su carril.
Sistema de asistencia al estacionamiento y prevención de marcha atrás –
ayuda a los conductores a estacionar y dar marcha atrás en sus vehículos. Los sistemas de detección de objetos traseros utilizan sensores y cámaras para permitir al conductor buscar objetos en la parte trasera del vehículo mientras retrocede.
Faro adaptativo
alerta a los conductores para que visualicen mejor los objetos en carreteras oscuras y con curvas. El faro gira en la dirección de un vehículo en movimiento para iluminar el camino adelante según la velocidad del vehículo y el movimiento del volante.
Sistemas de alerta de fatiga
Emplea algoritmos sofisticados para monitorear el control de la dirección y otros comportamientos como la duración y la frecuencia del parpadeo del conductor. Este sistema está diseñado para avisar al conductor si detecta somnolencia o falta de atención.
Sistema de advertencia de velocidad en curva
Supervisa el vehículo a medida que se aproxima a las curvas de la carretera mediante un sistema de posicionamiento global y un mapa digital. Los sensores de velocidad en curva alertan al conductor si el sistema detecta que el vehículo se acerca a una curva a una velocidad excesiva.
Protección del medio ambiente
Los sensores hacen que los vehículos modernos no sólo sean más seguros sino también más limpios. Proporcionan la información básica para una combustión limpia y eficaz del combustible en el motor, lo que permite reducir significativamente los valores de emisiones de escape y el consumo de combustible. Por último, respaldan el funcionamiento fiable de los sistemas de retratamiento de gases de escape de alta eficiencia. Algunos ejemplos son el catalizador de 3 vías controlado, el filtro de partículas diésel o el catalizador DeNOx.
A lo largo de la evolución de la era moderna, los fabricantes de vehículos han incluido sistemas automáticos en sustitución de los sistemas mecánicos, con el propósito de mejorar la eficiencia en el consumo de combustible, el confort, la potencia y el desempeño.
Debido a una limitante en la ECU para la protección del motor, estos sistemas no permiten arrancar el auto “patinando llantas” o que debido a un conductor novato el auto se apegue de manera inesperada, ni tampoco es posible revolucionar al máximo el motor mientras el auto está detenido.
En ese sentido, nos preguntamos ¿cuáles elementos conforman el sistema de aceleración electrónico y cómo funcionan?
En los autos con sistemas mecánicos, el ingreso de aire al motor se realizaba por medio del cable Bowden accionado por el motor. Por lo que este sistema no presenta ningún tipo de automatización, por lo que no existe un sistema de autodiagnóstico. Adicionalmente, en los sistemas de control de mariposa motorizado, se intenta copiar el principio del carburador, moviendo un elemento regulador del paso de aire, a solicitud del conductor por el accionamiento de un pedal.
En cambio, en los sistemas de aceleración electrónica, la entrada de aire no se controla mediante un cable, sino mediante una señal eléctrica. A medida que se cambia la posición del pedal, el sistema de control electrónico ordena al cuerpo de aceleración la apertura o cierre de la mariposa, según la acción del conductor y las condiciones de desempeño. Por ejemplo, la computadora puede activar modos específicos de seguridad o protección contra fallas, siendo de esta forma posible que un vehículo “no obedezca” al conductor si se reporta alguna falla en el sistema, porque es función del programa almacenado en la memoria de la ECU.
Componentes básicos del sistema electrónico de aceleración (varían de acuerdo al modelo)
1. Pedal del acelerador
Dependiendo del fabricante, el pedal del acelerador cuenta con dos o tres sensores. Al presionar el pedal, se envía una señal a la computadora, la cual interpreta la solicitud del conductor y ordena al cuerpo de aceleración la apertura de la mariposa, en función del requerimiento y de las condiciones de desempeño del vehículo. La electrónica de este dispositivo es muy básica.
Este dispositivo consta de dos sensores, a los cuales se les conoce con la nomenclatura APP1 y APP2, ambos para el monitoreo de la posición exacta del pedal. Fabricantes como GM y FORD utilizan hasta tres sensores para le verificación de la posición exacta del pedal. Lo cual disminuye las posibilidades de mediciones incorrectas., puesta la unidad de control verifica la correlación entre ambos (o entre los tres) sensores. Es decir, la ECU dispone de una estrategia redundante para la detección de fallas relacionadas con el pedal del acelerador.
2. Cuerpo de aceleración
Esta válvula regula la cantidad de aire que ingresa al motor, intentando copiar el sistema de regulación de aire que ofrecía al carburador, sólo que controlado electrónicamente.
El elemento regulador es la mariposa de aceleración, que es accionada por un motor y para lo cual cuenta con una interfaz electrónica que se comunica permanentemente con la computadora principal.
El cuerpo de aceleración consta de un actuador motorizado bipolar que, unido mediante un eje, coloca a la mariposa en la posición ordenada por la unidad de control, contando además con una interfaz electrónica. La mariposa tiene una posición de reposo considerada de emergencia, pues permite un ingreso de aire suficiente para mantener encendido el vehículo, aun en condiciones de fallas graves en el sistema de aceleración
La responsabilidad de gestionar el sistema de control electrónico de aceleración recae sobre la computadora principal del vehículo. La ventaja de este sistema, es que automatiza muchas funciones que el usuario no podría controlar eficientemente y ello se traduce en mejoras como: ahorro de combustible, control de emisiones, manejo y arranque suaves, seguridad y protección de fallas, entre otros.


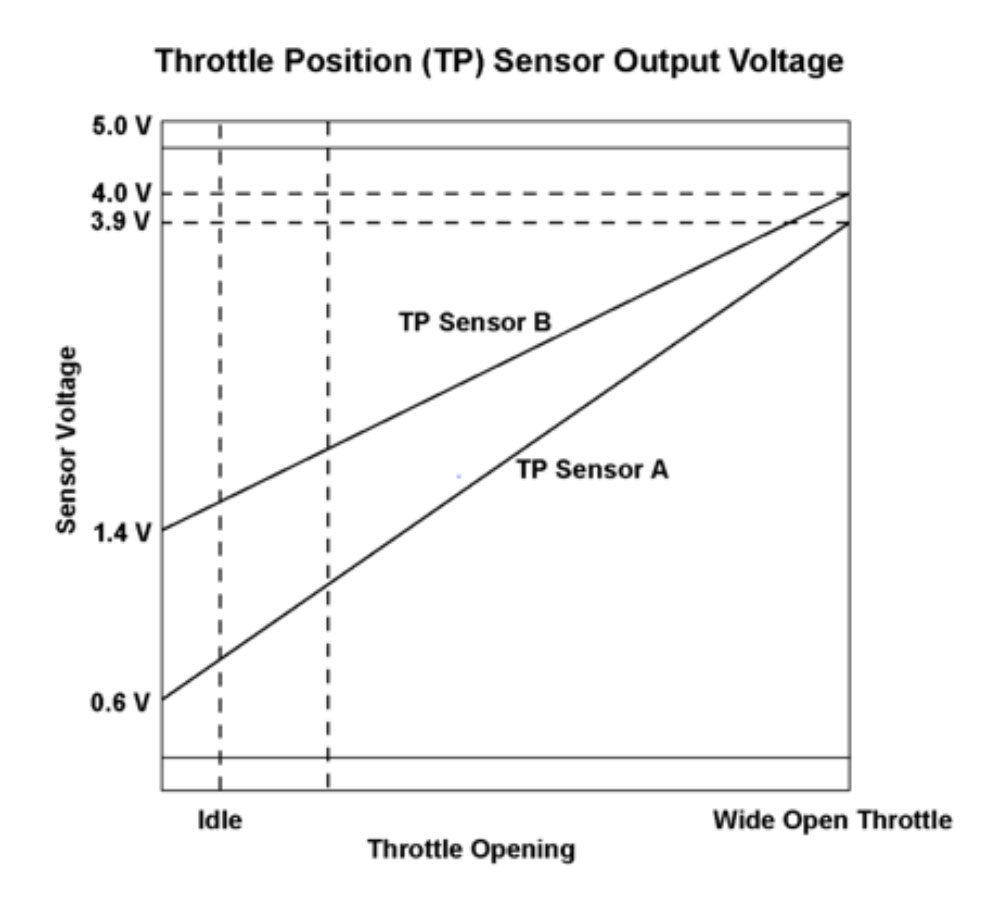
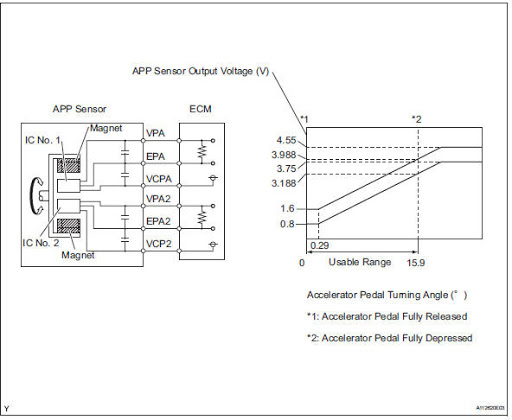

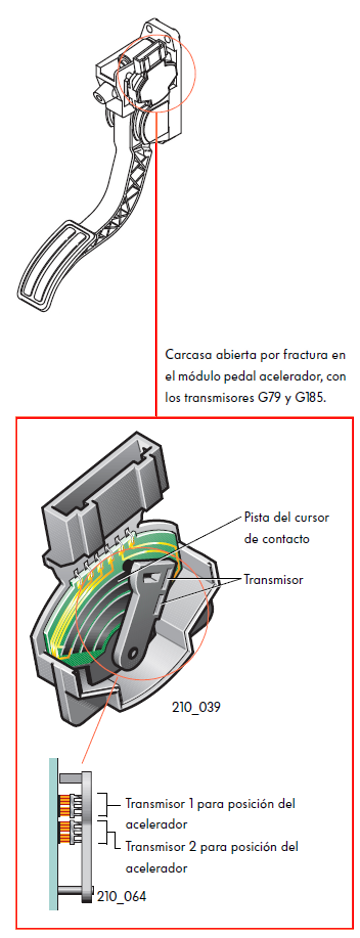


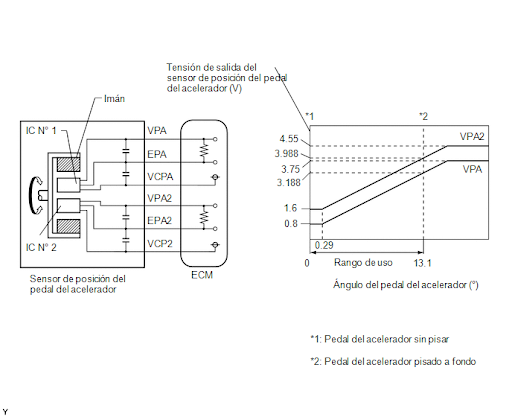
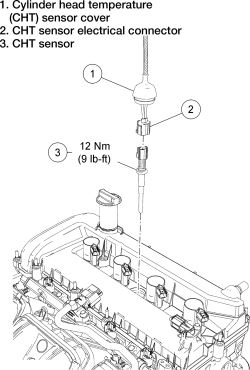
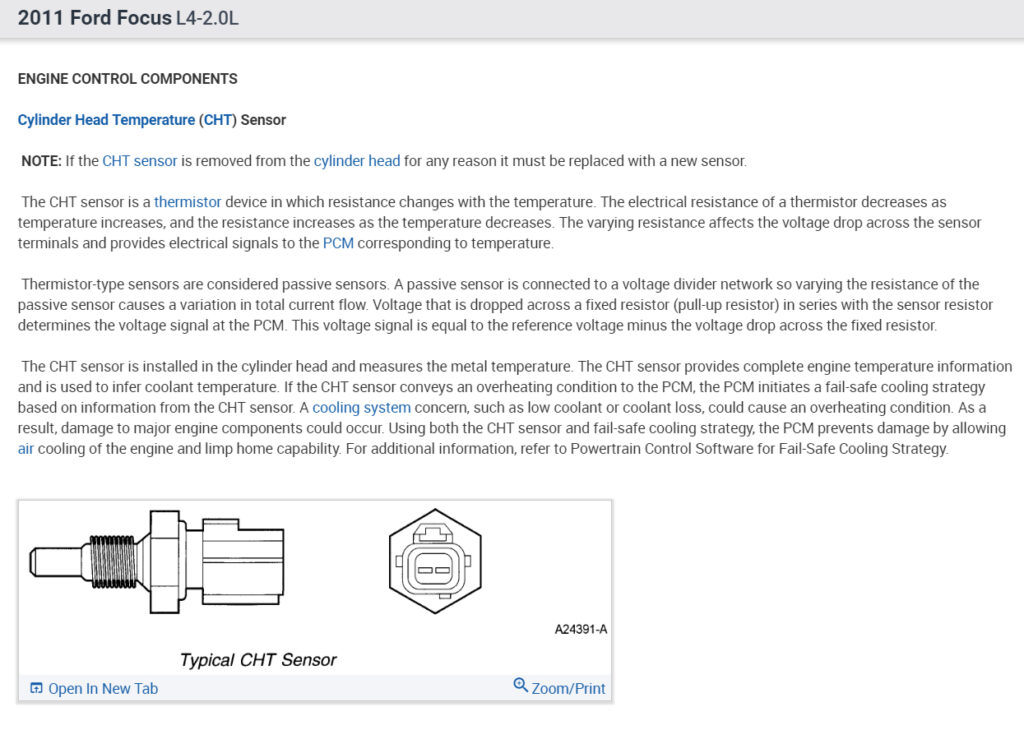
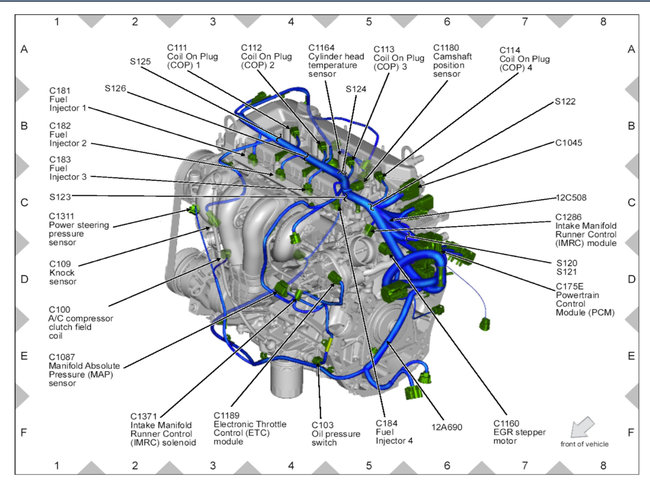
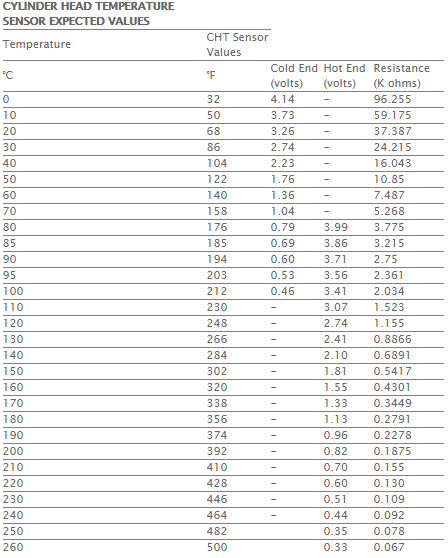
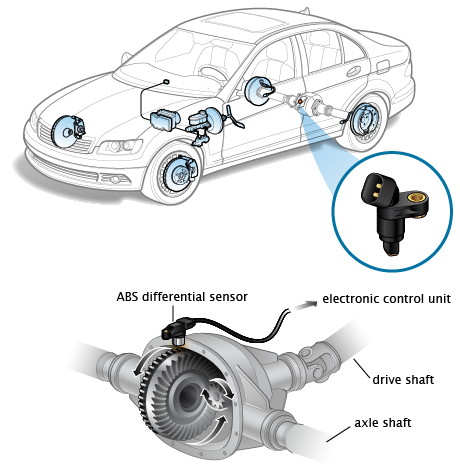


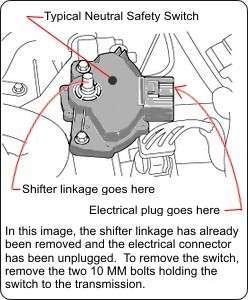


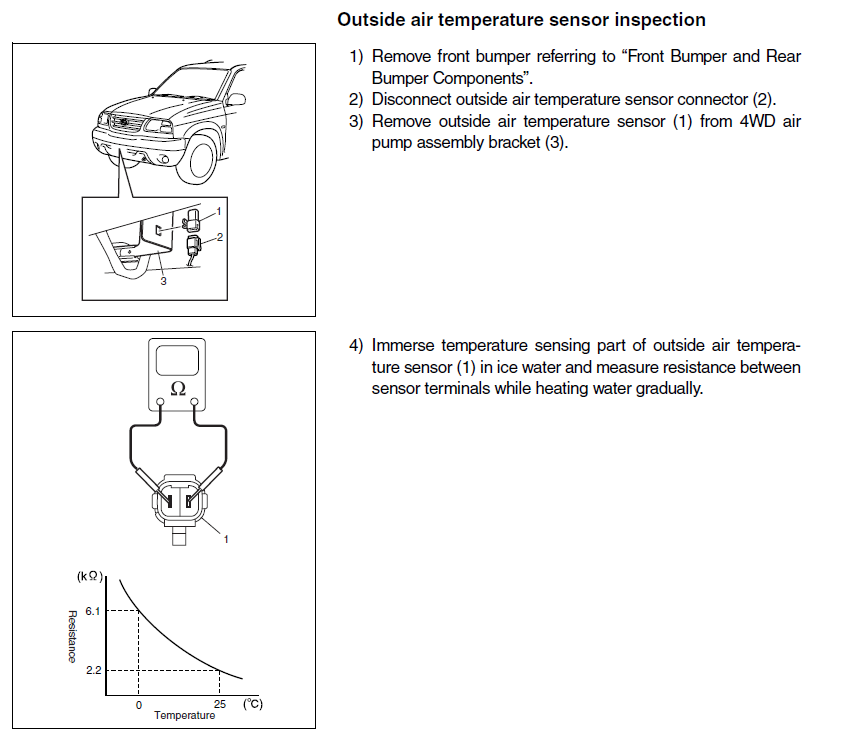

/index_clip_image004.jpg)



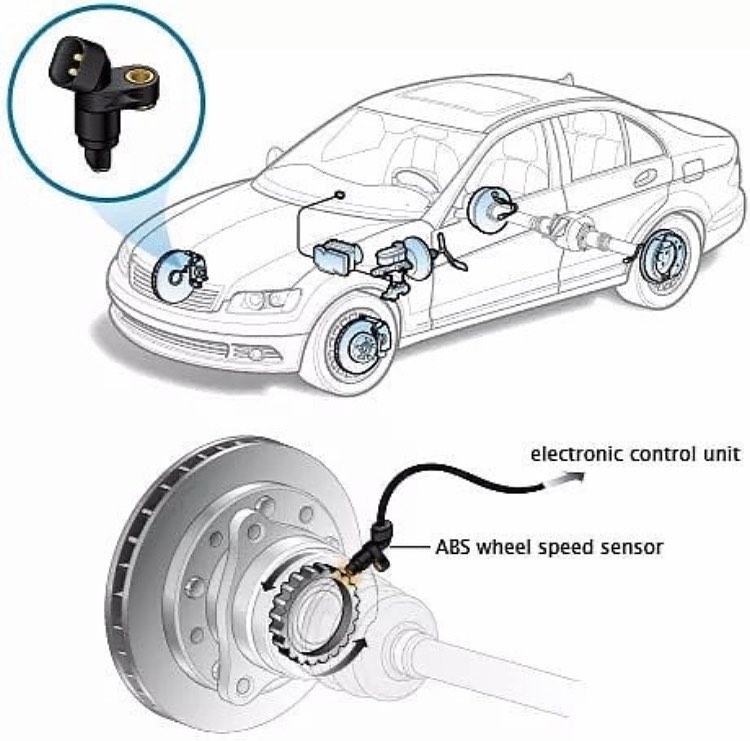


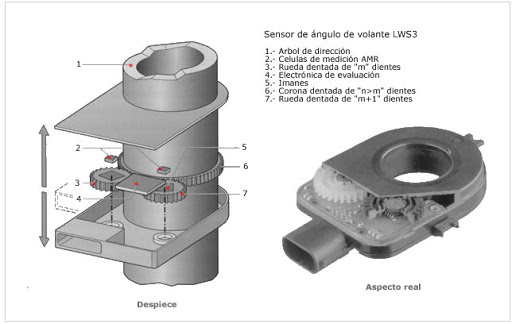
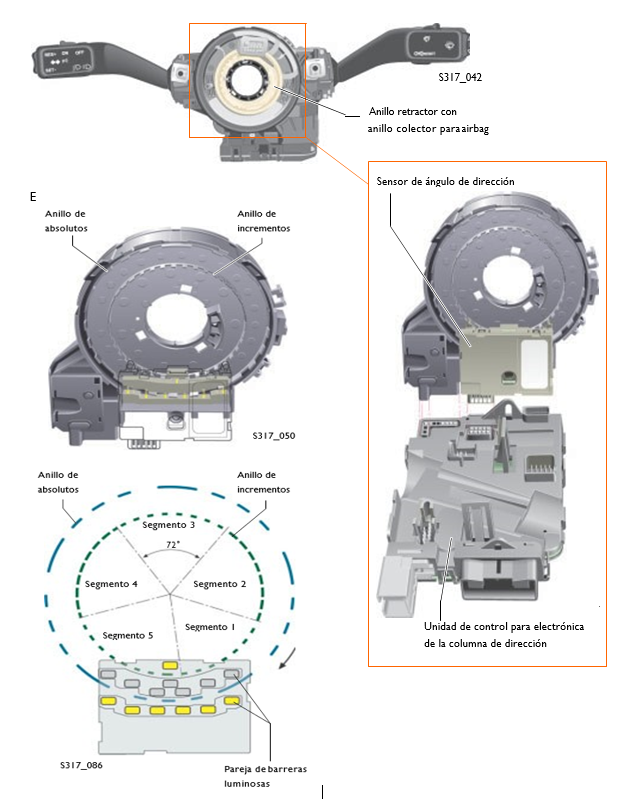
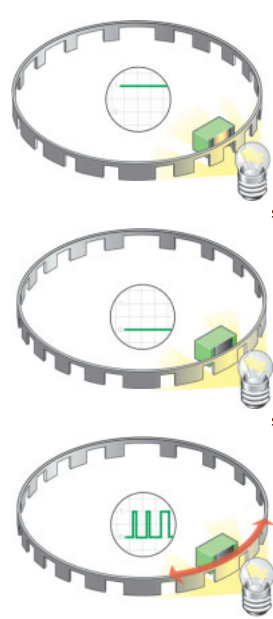


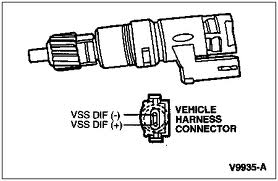
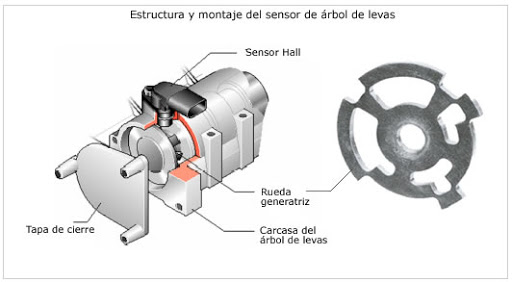
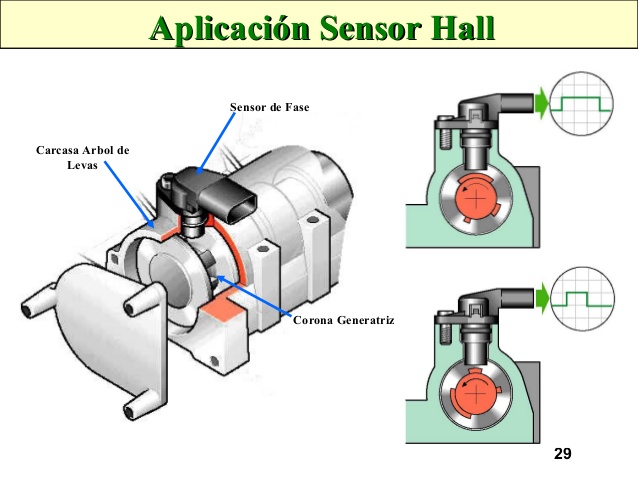
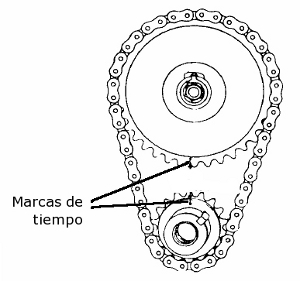
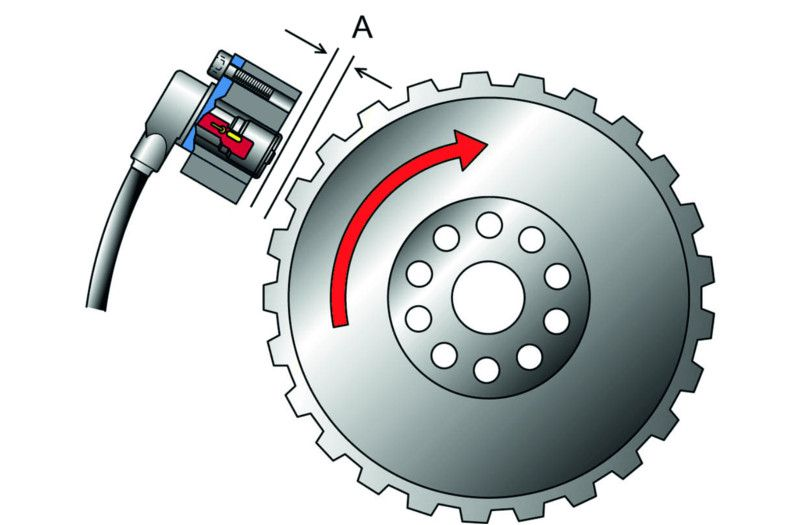
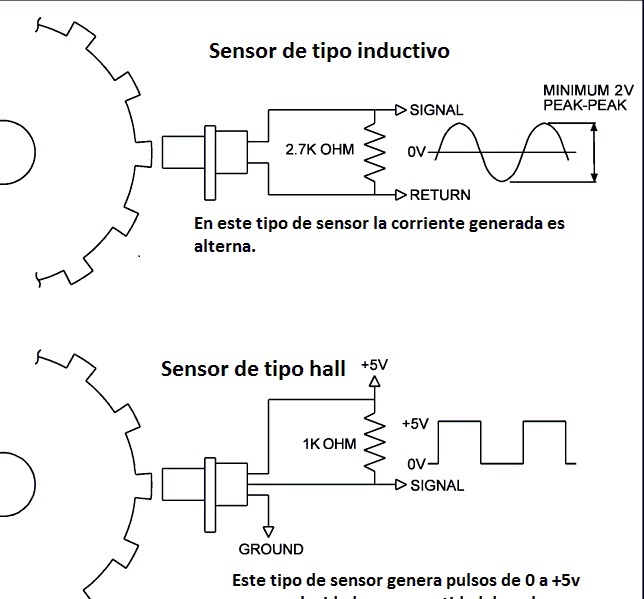

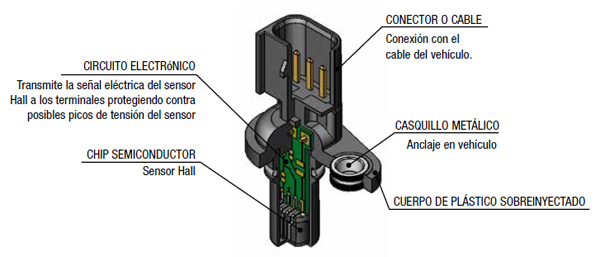

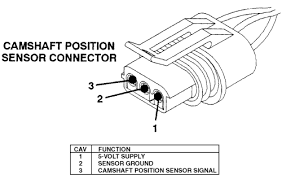
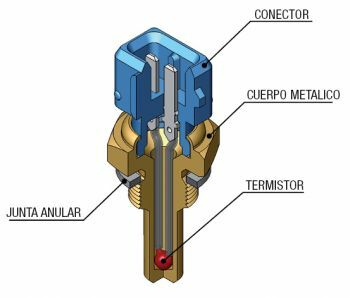
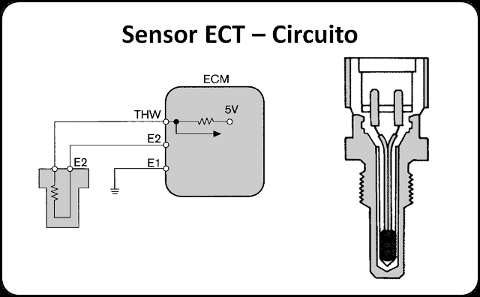

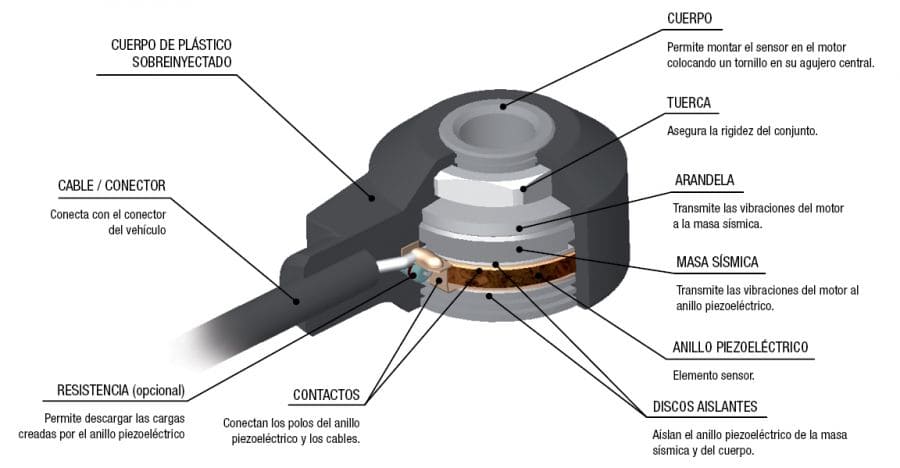


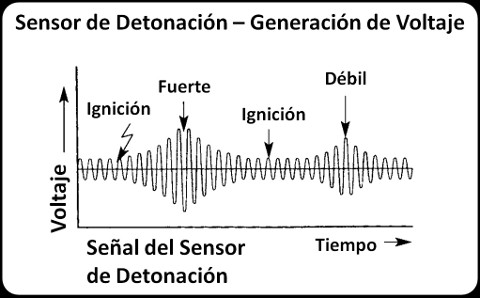
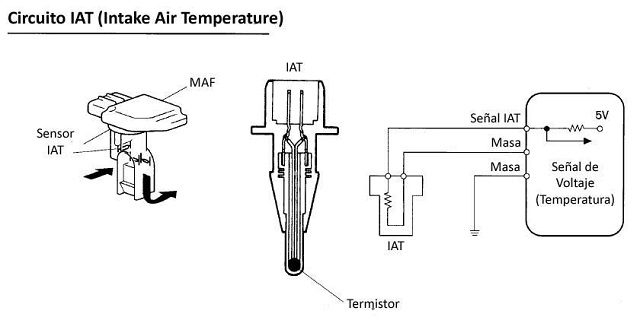
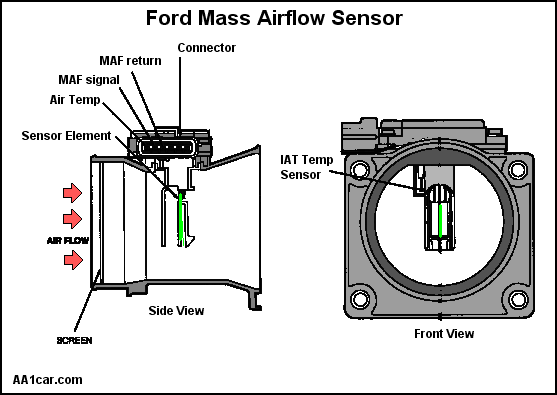



/MAF_5.gif)