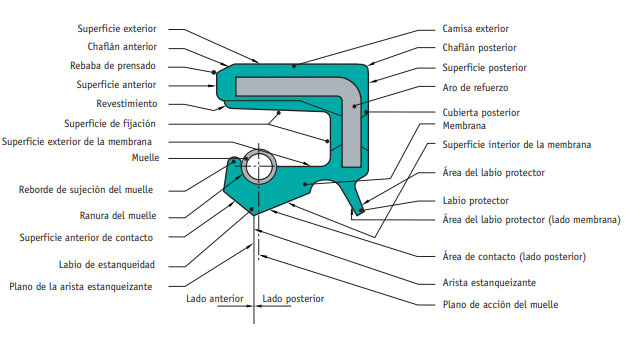
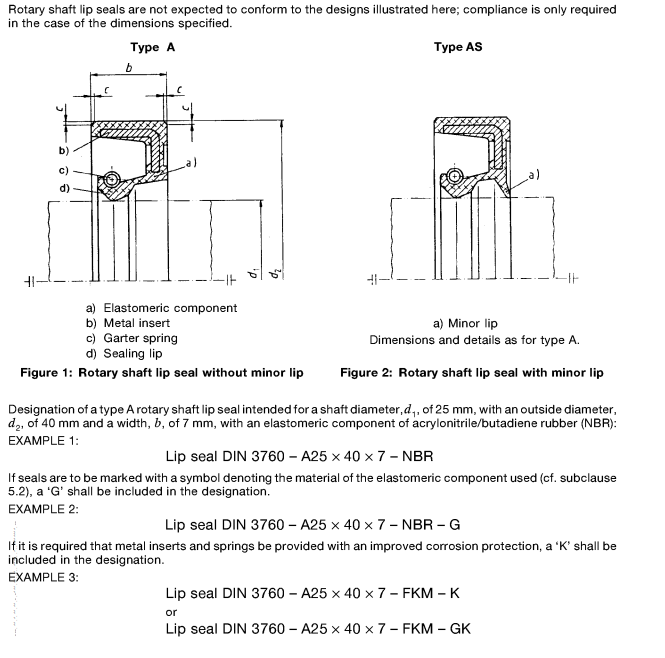
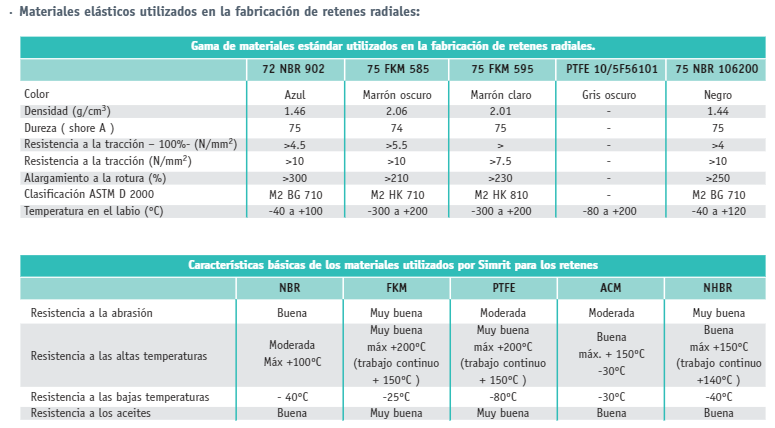
La función de un reten radial es mantener un fluido, por ejemplo aceite, un gas, etc., dentro de un volumen, que normalmente se encuentra atravesado por un eje que gira o se mueve axialmente. El reten va montado en la parte fija de la máquina (alojamiento) y tiene un labio flexible (asistido por un resorte) que sella contra el eje en movimiento, impidiendo el paso de fluido que se debe retener.
Para el diseño y selección de sellos se debe considerar lo siguiente:
El fluido a ser sellado interno o externo
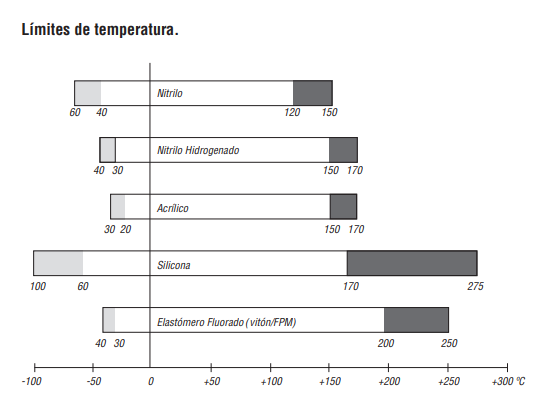
Temperatura media del ambiente
El eje en cual el eje sellador se desliza
Los diseños de elemento sellador para el cual se desarrollo el herramental
El elemento que sella debe ser lo suficiente flexible para que adapte al descentrado del eje, pero suficientemente rígido para evitar falla en condiciones de operación
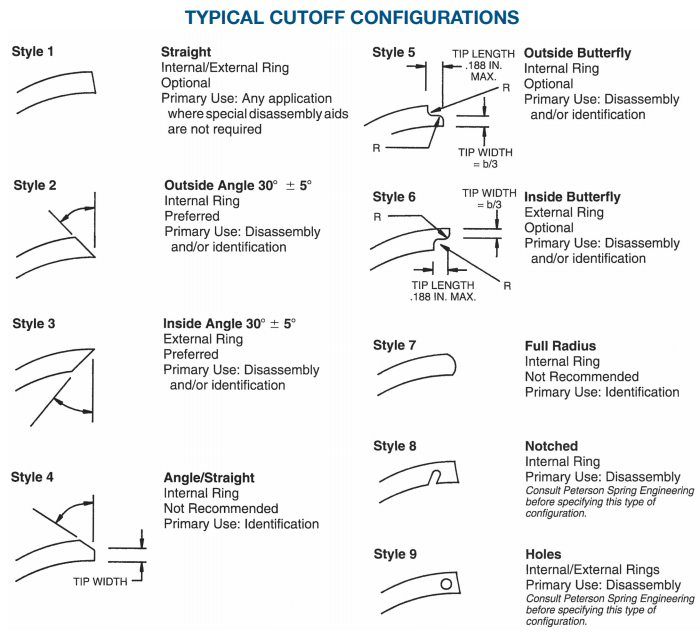
La combinación de ángulos que se miden entre la superficie recortada y el ángulo de aproximación es crítico esto particularmente cierto del ángulo en dirección al aceite, Si el ángulo es demasiado agudo, un sellado bien diseñado funcionará eficientemente.
Instalación de sellos
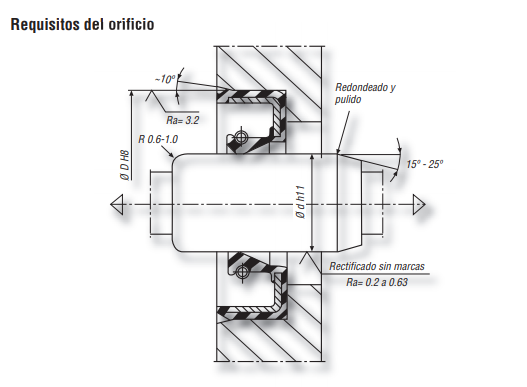
La cavidad cilíndrica debe ser redonda y lisa así como contener un chaflan apropiado con un mínimo de marcas de herramienta y sin ranuras de regreso de herramienta, Se debe diseñar en el fondo de la cavidad cilíndrica y esta misma cavidad deberá estar concéntrica a la superficie de retención del cojinete
Diseño
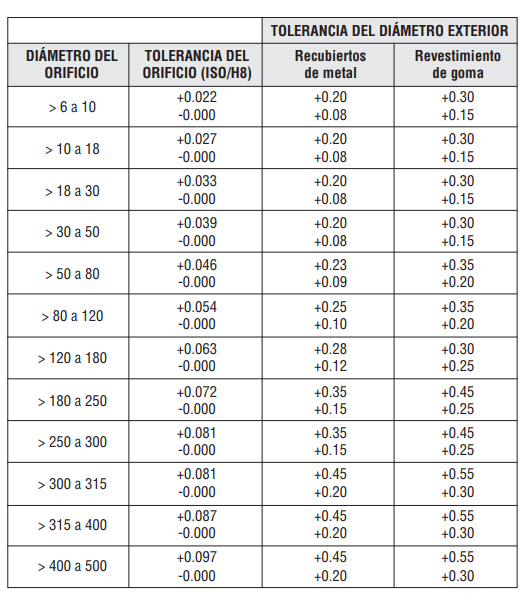
Tolerancia del orificio.
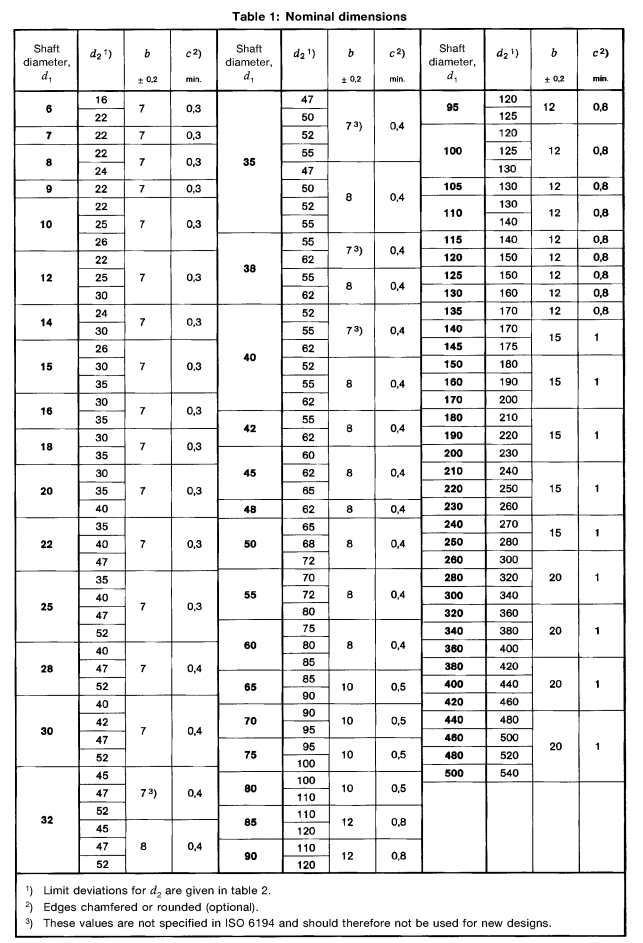
Los diámetros exteriores del orificio son normalmente más grandes que el orificio del sello: de 0,13 mm para el metal y 0,51 mm para la goma. Para asegurar el necesario ajuste a presión, respete las dimensiones indicadas en los cuadros. Las tolerancias de los cuadros sólo tienen aplicación para materiales ferrosos. Por ejemplo, el aluminio generalmente tiene un límite de expansión térmica mayor que el acero
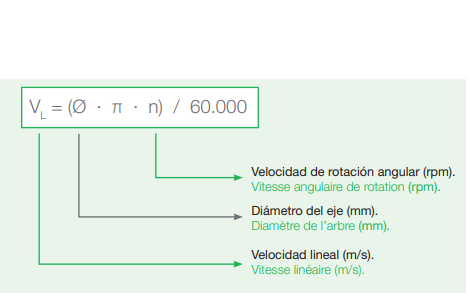
Velocidad
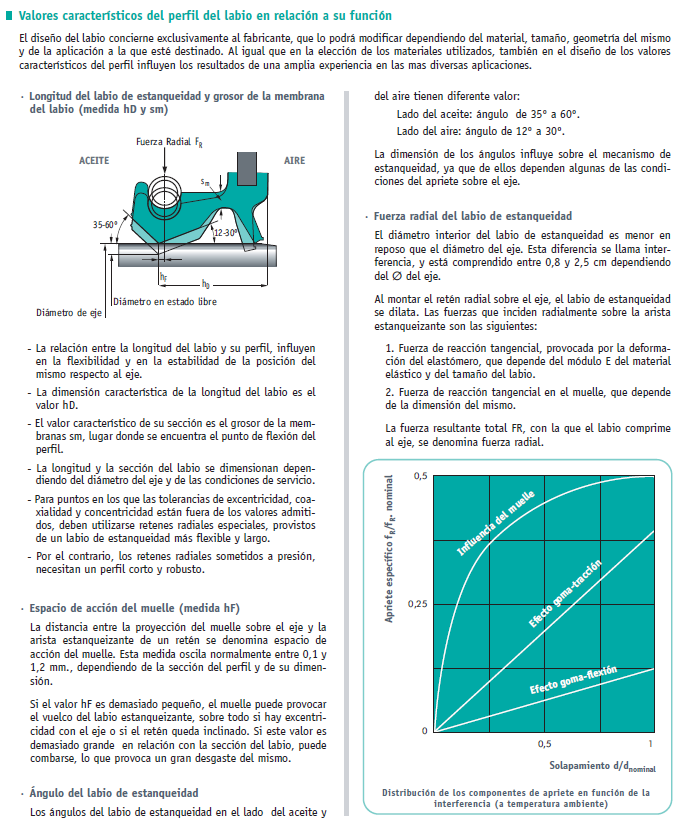
El desgaste que sufre el labio de un retén es consecuencia directa de la velocidad de giro del eje. A partir de esta velocidad y teniendo en cuenta el diámetro del eje, se obtiene la velocidad lineal (VL) con la que trabaja el labio. Se calcula VL según la siguiente expresión:
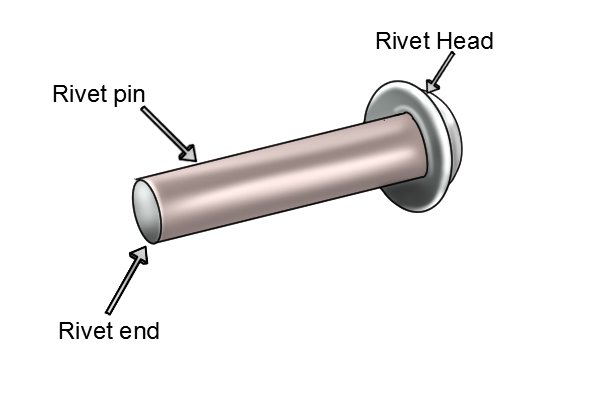
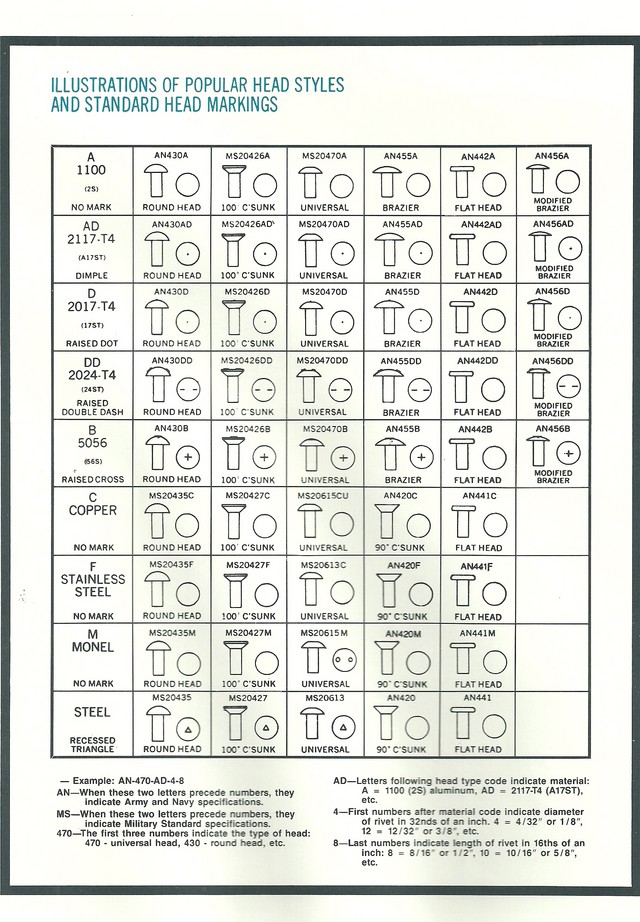
El remache es un método de sujeción y de unión principalmente debido a su simplicidad, seguridad y bajo costo
Básicamente un remache es un pasador de metal dúctil que se inserta a través de barrenos en dos o mas piezas, teniendo los extremos formados encima para sostener las piezas firme mente
Una de las principales cualidades que tienen los remaches es que se les pueden dar diferentes usos tales como unir diferentes piezas de diferentes materiales, así como funcionar como sujetadores, espaciadores y pivote de dos ejes, contacto eléctrico, tope o inserto
Una desventaja del remache es que una vez unida ambas piezas para su mantenimiento se dificulta ya que hay que destruir el remache para realizar el mantenimiento respectivo lo que generaría un maltrato de piezas así como la destrucción del remache
El remachado es esencialmente un proceso de forja, que se ha desarrollado partiendo de un proceso de martillado a mano hasta llegar al método actual de colocación a máquina. El material empleado es acero dulce, es decir, con poco contenido de carbono, característica que favorece el conformado, ya que el material se deforma fácilmente, siendo este tipo de material es fácilmente maleable
El proceso de remachado puede ser realizado en caliente o en frio según el tamaño del remache o roblón, entendiendo por remaches de pequeño tamaño los de diámetro inferior a 12 mm, las operaciones de unión se practican en frio y cuando es superior se realizan calentando previamente el roblón. A esta operación se le llama caldeo. Inicialmente la cabeza de los remaches se conseguía a golpe de martillo, pero actualmente todo esta simplificado por el uso de maquinaria especial. Para realizar el remachado primero se perfora la chapa a unir, se coloca el remache (frío o caliente) en la perforación y se conforma la otra cabeza.
El montaje de la unión remachada se realiza colocando las dos piezas a unir en posición de montaje haciendo coincidir los agujeros de las dos piezas. Seguidamente se introduce el remache y se coloca una pieza denominada sufridera apoyada sobre la cabeza del remache. Esta pieza tiene una cavidad de forma inversa a la cabeza del remache. Posteriormente, con otra pieza denominada estampa se golpea el extremo opuesto del remache, adoptando este la forma de la cavidad de la estampa y produciendo el remachado.
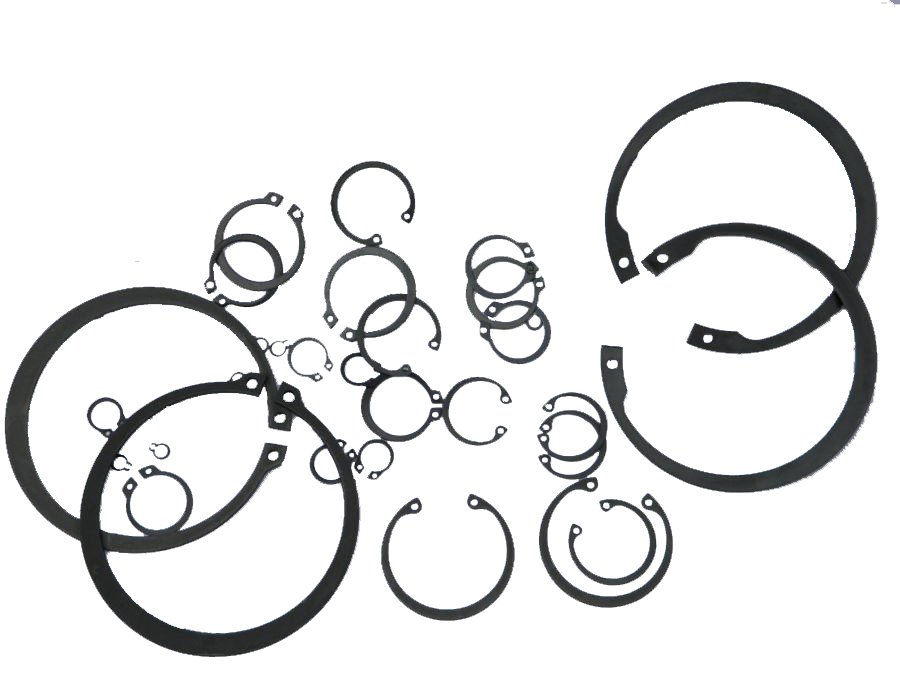
Para la industria los anillos retenedores son elementos indispensables de fijaciones de ejes, bujes, rodamientos, entre otras cosas. En la industria Automotriz este elemento es indispensable para muchas partes que llevan movimiento en el vehículo.
Los anillos de retención son esencialmente vigas delgadas y circulares que son lateralmente estables y se cargan en flexión pura. Se utilizan varios enfoques de diseño para diseñar anillos para aplicaciones dadas y todas se basan en principios de ingeniería mecánica como la ley de Hooke y el teorema de Castigliano.
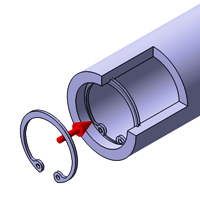
Un anillo de retención es útil justo para retener partes de un ensamblaje de manera segura. Se trata de una solución de fijación para los componentes y montajes que van en ranuras, carcasas o ejes, proporcionando un hombro para retener todo un ensamble.
Una de las mejores características de estos productos es que eliminan roscados, taladrados y perforados, así como otras operaciones que requieren los sujetadores tradicionales como tornillos, tuercas, clavijas, pasadores, arandelas y más
Tipos de anillos
Anillos Interiores
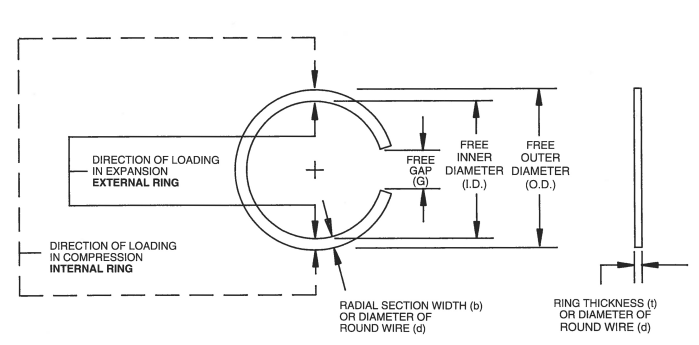
Se trata de un anillo que encaja en una ranura. que abarcará el diámetro exterior del anillo y es típicamente contenido en algún tipo de vivienda. Un exterior libre El diámetro generalmente se especifica en los anillos internos.
Anillos Exteriores
Un anillo que encaja en una ranura. que abarcará el diámetro interior del anillo y normalmente se utiliza en algún tipo de eje. Un diámetro interior libre es generalmente especificado en anillos externos.
Diseño de Anillos
Los parámetros generales a considerar son los siguientes
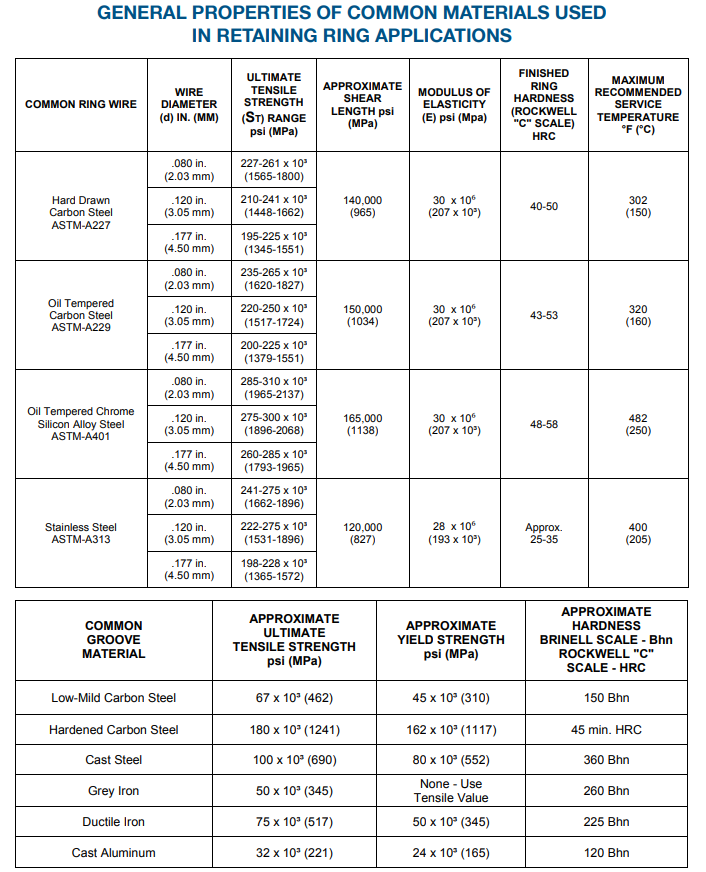
Diámetros de anillo de .500 pulg. A 24.000 pulg. (12,7 mm a 610 mm) se puede producir en st
181/5000Una buena regla general es ± .010 pulg. (0.25 mm) por cada 1.000 pulg. (25,4 mm) de diámetro. La excepción son los anillos por debajo de 1.500 pulg. (38,1 mm) que debe permanecer en ± 0,15 pulg. (0,38 mm).
La tolerancia del espesor del anillo debe ser de ± 0,002 pulg. (0,05 mm). Para mantener una tolerancia controlada estadísticamente de ± 0,001 pulg. (0,025 mm), se requiere rectificado secundario agregando un gasto significativo.
La tolerancia del ancho radial de la sección del anillo de la tolerancia debe ser de ± 0,004 pulg. (0,102 mm) mínimo.
Flatness: La hélice libre máxima debe ser igual al anillo máximo grosor. Las tolerancias del plato se especifican generalmente como 0,005 pulg. (0,13 mm) sobre el grosor máximo de la sección del material cuando se mide bajo placas paralelas que ejercen una carga de 10 lb (4,5 kg).
Los resortes Helicoidales son muy utilizados en la Industria automotriz para absorber las vibraciones del camino, son fundamentales en la suspensión automotriz, pero no solamente tiene esas aplicaciones si no en otros lugares podemos encontrarlas como en palancas, frenos, transmisiones , motores etc.
Resortes Helocoidales
Se utilizan para resistir las fuerzas de compresión aplicadas y/o para almacenar energía. Tienen la configuración de resorte más común y se encuentran en muchas aplicaciones como la automotriz, aeroespacial y entre otras. La forma más común del resorte de compresión es un resorte cilíndrico hecho de alambre redondo, se producen muchas otras formas.
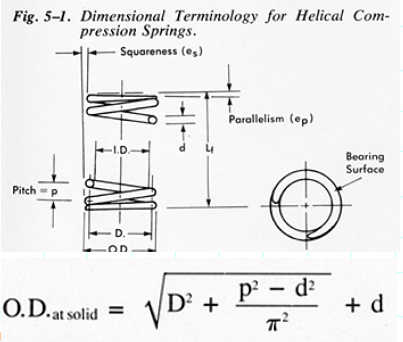
El diámetro exterior, el diámetro interior y el diámetro medio se utilizan para describir dimensiones del resorte de compresión helicoidal. El diámetro medio es igual a la suma de O.D
I.D. dividido por dos, y se emplea en los cálculos de diseño de resortes para tensión y deflexión. El O.D. se especifica para resortes que operan en una cavidad, mientras que el I.D. se especifica para resortes que operan sobre una varilla, asiento o eje. Mínimo La holgura diametral entre el resorte y la cavidad o varilla es:
0.05D – cuando Dc es mayor que 13 mm (0.512 «) 0.10D – cuando Dc es menor de 13 mm (0.512 «) Dc es el diámetro de la varilla o cavidad.
El diámetro aumenta cuando se comprime un resorte. Aunque el aumento de El diámetro suele ser pequeño, debe tenerse en cuenta cuando los espacios mínimos son establecido. El aumento de diámetro es función del paso inicial del resorte y puede estimarse a partir de la siguiente ecuación donde p = paso.
Número de vueltas
El número total de vueltas debe especificarse como número de referencia. Para muelles con extremos cuadrados, el número total de bobinas menos dos es el número de bobinas activas. Hay algo de actividad en las bobinas terminales, pero durante la deflexión algo de material activo entra en contacto con las bobinas de los extremos y se vuelve inactivo
Un resorte de compresión helicoidal se puede enrollar hacia la izquierda o hacia la derecha
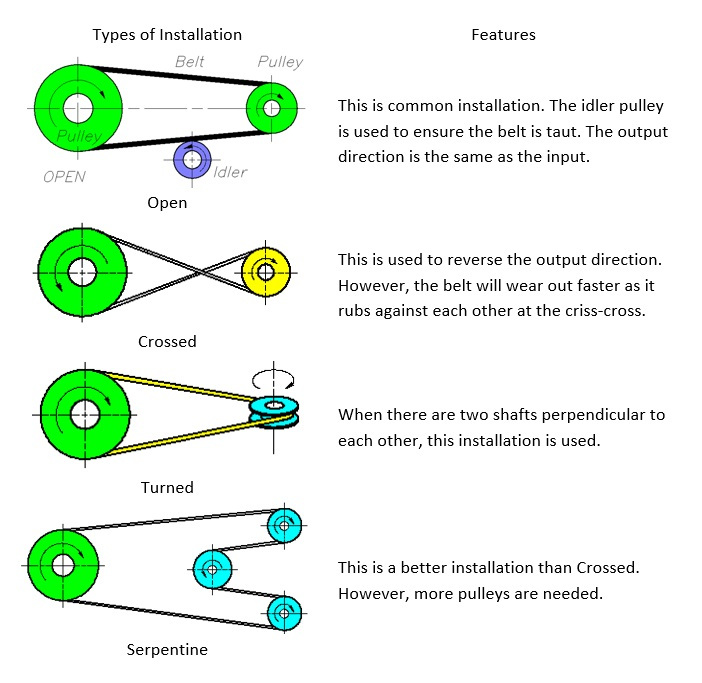
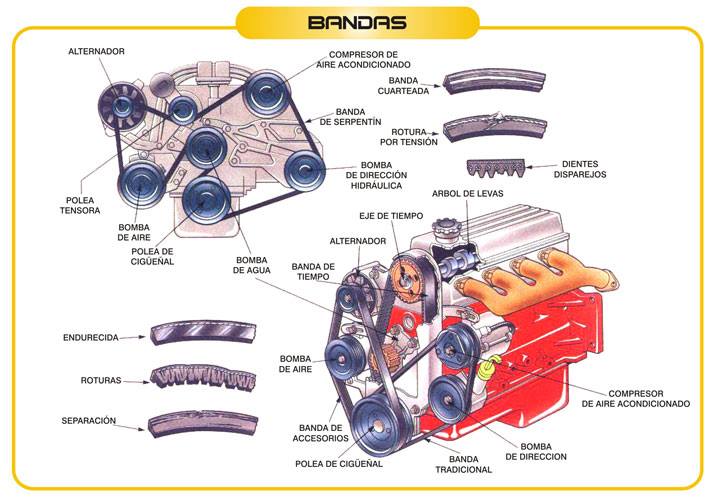
Las bandas o correas son componentes flexibles en tranmision de potencia, generalmente empleada en todas las industrias pero una de sus principales sectores en el cual las vamos a poder encontrar son en la industria automotriz para tomar la sincronía de los motores como una banda de distribución.
Estos elementos son utilizados para transmitir movimiento en componentes como compresores, alternadores, bombas de agua, bombas de liquido de dirección e inclusive elementos más complejos como un supercargador.
Las bandas son elementos que se encuentran montados en poleas y tensores los cuales en conjunto hacen que se genere un movimiento generando una transmision de un mecanismo en especifico
Las bandas deben soportar altas temperaturas, así como soportar tensiones, torques elevados, altas revoluciones por minuto, así como soportar las condiciones climáticas a las que estén sometidas hablando de temperatura y presión.
Cabe destacar que un sistema de transmision por bandas es bastante bueno y eficiente, así como su costo es más barato que un sistema de engranes cadenas pero tiene una desventaja, que su mantenimiento suele ser económico pero en cierto punto continuo debido a las propiedades del material que empieza a fisurarse y presentar holguras
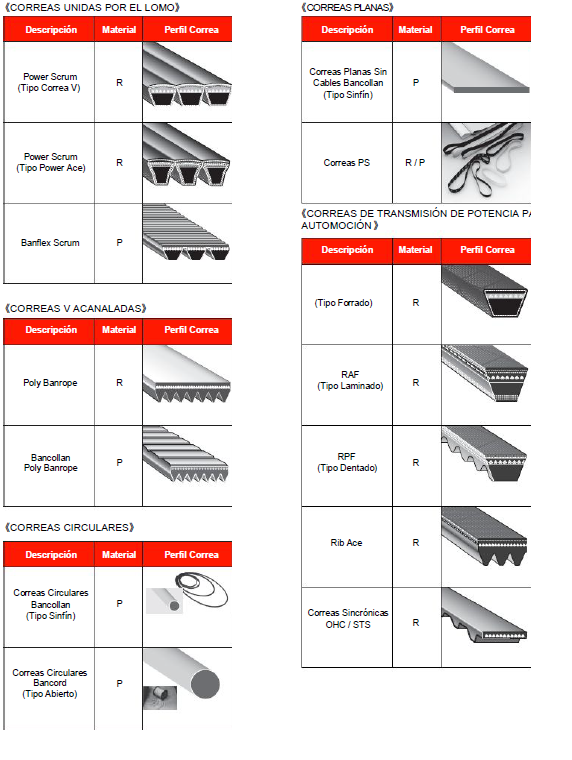
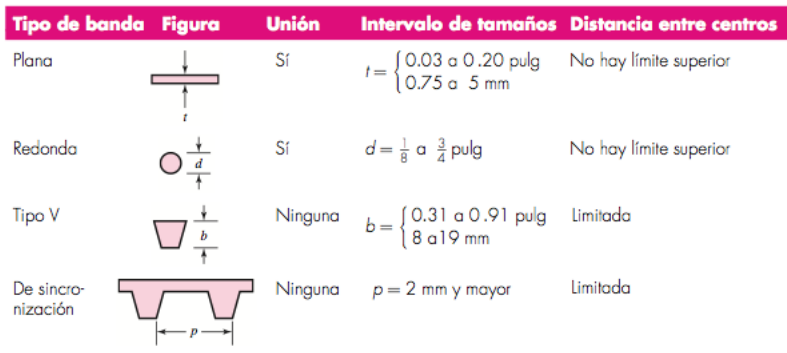
Tipos de bandas
Bandas planas
Nos brindan una flexibilidad, absorción correcta de vibraciones así como una transmision eficiente a altas velocidades de giro (RPM), estas tienen la caracaterística de estar básicamente en poleas realetivamente pequeñas pueden ser empalmadas o conectadas para funcionamiento sinfin
Tiene una eficiencia del 98% acercándose mucho a los mecanismos por engranajes
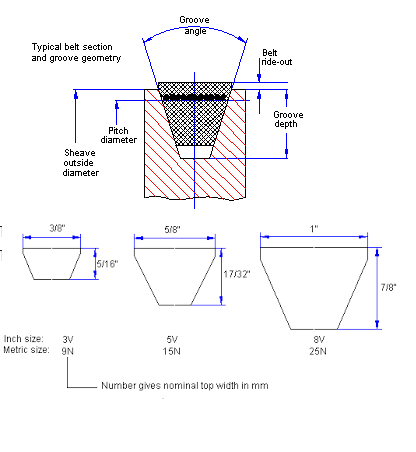
Bandas en v
Son las más empleadas en la industria ya que sus características de ñas bandas en V funcionan mejor en velocidades que oscilan entre los 1500 a 6000 ft/min (8 a 30 m/s), sin embargo funcionan gasta 10,000 ft/min (50m/s)
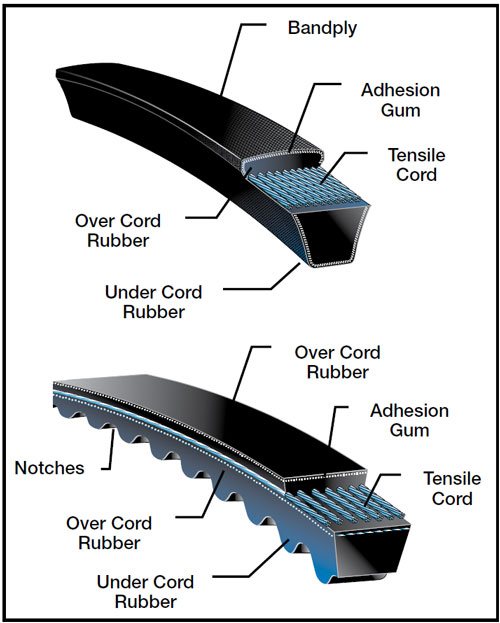
Composición y Propiedades de materiales para bandas
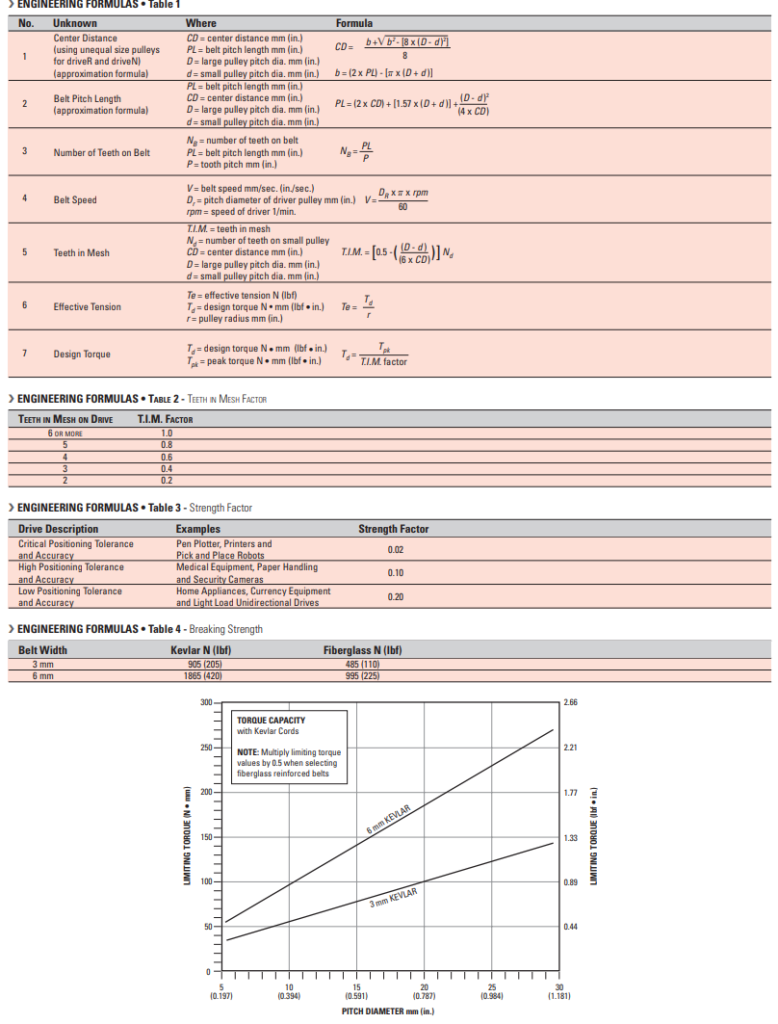
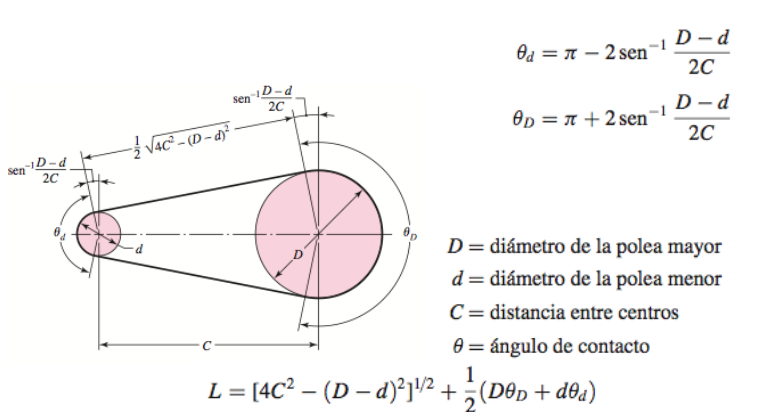
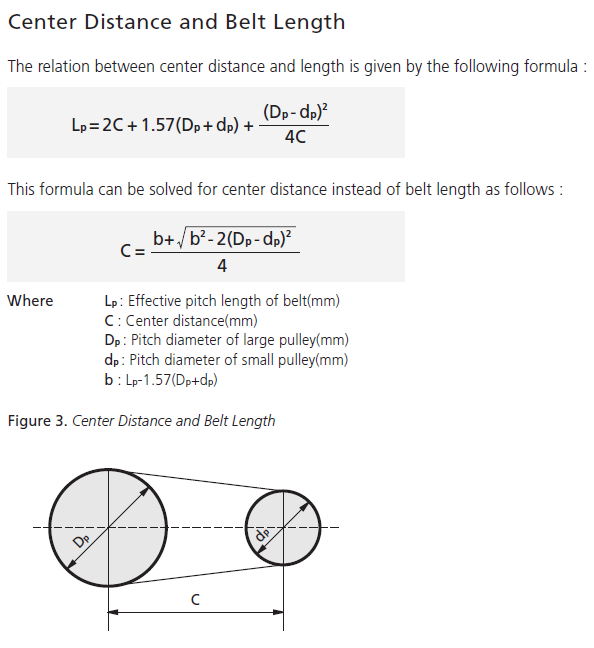
Diseño de bandas
Cuando se emplea una transmisión de banda abierta, los ángulos de contacto se determinan mediante
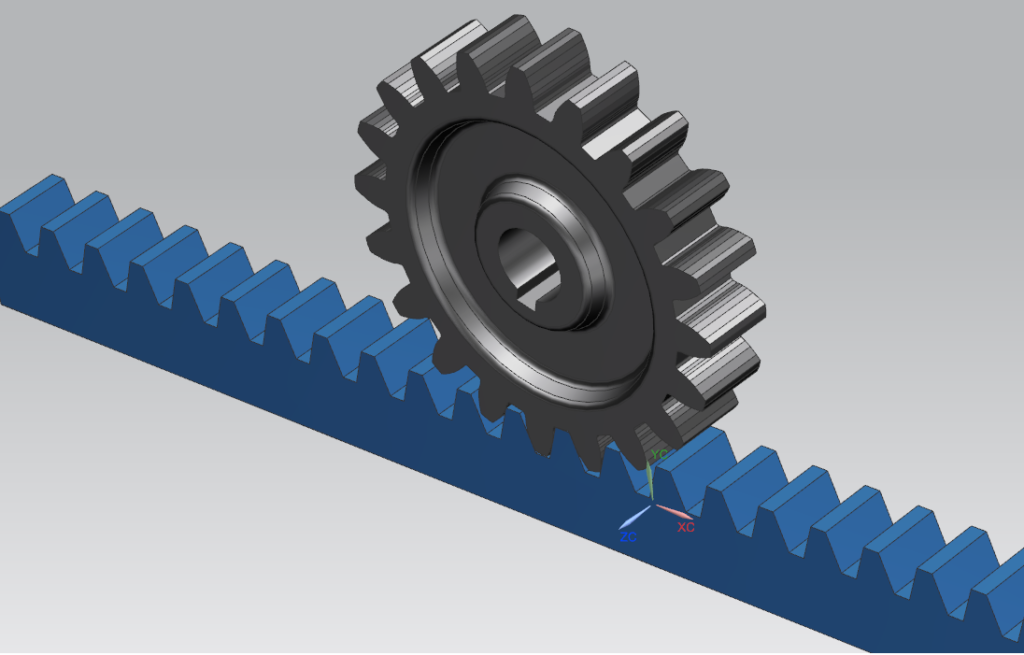
Los sistrmas de engranes de íñon y cremallera se utilizan para convertir el movimiento giratorio en movimiento lineal. Una cremallera tiene dientes rectos cortados en una superficie de una sección cuadrada o redonda de la barra y funciona con un piñón, que es un engranaje cilíndrico pequeño que se engrana con la cremallera.
En general, la cremallera y el piñón se denominan colectivamente «cremallera y piñón». Hay muchas formas de usar engranajes. Por ejemplo, como se muestra en la imagen, se usa un engranaje con la cremallera para girar un eje paralelo.
Si la aplicación requiere una larga longitud que requiere múltiples cremalleras en serie, tenemos bastidores con las formas de los dientes configuradas correctamente en los extremos. Estos se describen como «cremalleras con extremos mecanizados». Cuando se produce una cremallera, el proceso de corte de dientes y el proceso de tratamiento térmico pueden hacer que intente salir de la realidad. Podemos controlar esto con prensas especiales y procesos correctivos.
Hay aplicaciones en las que la cremallera es estacionaria, mientras el piñón atraviesa y otras donde el piñón gira sobre un eje fijo mientras la cremallera se mueve. El primero se usa ampliamente en sistemas de transporte, mientras que el segundo se puede usar en sistemas de extrusión y aplicaciones de elevación / descenso.
Como elemento mecánico para transferir el movimiento rotativo a lineal, las cremalleras de engranajes a menudo se comparan con los husillos de bolas. Hay ventajas y desventajas para usar cremalleras en lugar de tornillos de bola. Las ventajas de una cremallera son su simplicidad mecánica, gran capacidad de carga y sin límite de longitud, etc. Sin embargo, una desventaja es la reacción. Las ventajas de un husillo de bolas son la alta precisión y menor holgura, mientras que sus defectos incluyen el límite de longitud debido a la desviación.
La cremallera y los piñones se utilizan para mecanismos de elevación (movimiento vertical), movimiento horizontal, mecanismos de posicionamiento, topes y para permitir la rotación sincrónica de varios ejes en maquinaria industrial en general. Por otro lado, también se utilizan en sistemas de dirección para cambiar la dirección de los automóviles. Las características de los sistemas de piñón y cremallera en la dirección son las siguientes: estructura simple, alta rigidez, pequeña y ligera, y excelente capacidad de respuesta. Con este mecanismo, el piñón, montado en el eje de dirección, se engrana con una cremallera de dirección para transmitir el movimiento giratorio posteriormente (convirtiéndolo en movimiento lineal) para que pueda controlar la rueda. Además, la cremallera y los piñones se utilizan para otros fines, como juguetes y puertas laterales deslizantes.
Diseño y fórmulas
En el sector atomotriz
El mecanismo de dirección se utiliza para cambiar la dirección de los automóviles y se clasifican principalmente en tipos de cremallera y piñón.
De estos dos, el mecanismo de dirección tipo piñón y cremallera se ha convertido en la corriente principal utilizada en muchos automóviles pequeños. Su construcción es simple con otras características como peso ligero, alta resistencia, baja fricción, capacidad de respuesta superior, etc.
El mecanismo de dirección de tipo cremallera y piñón consiste en un piñón unido a la punta del eje de dirección en el que está montado el volante. El piñón está engranado con una cremallera para que el movimiento del mango gire el piñón que a su vez mueve la cremallera lateralmente. La rueda se mueve hacia la izquierda y hacia la derecha a través del sistema de tirantes conectados a los extremos del bastidor.
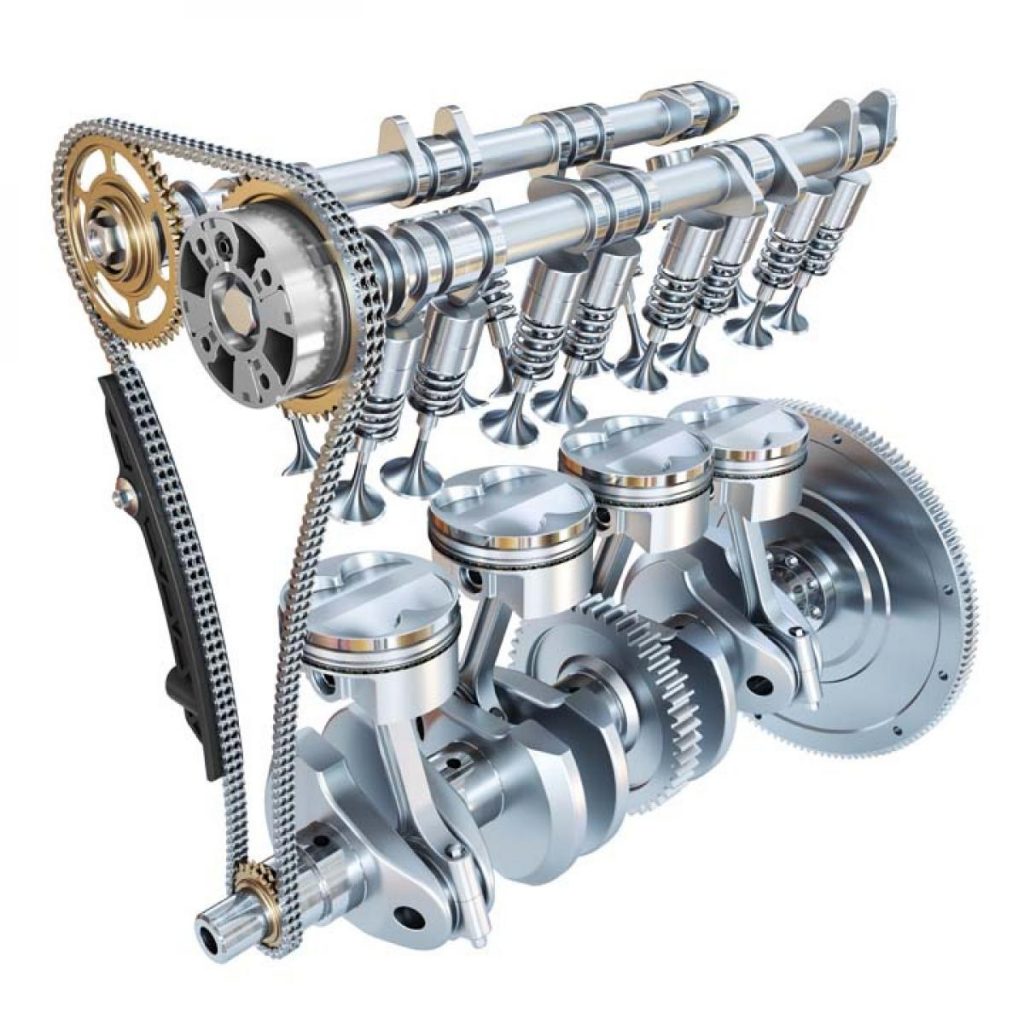
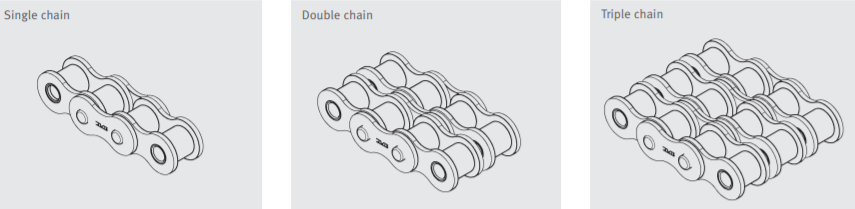
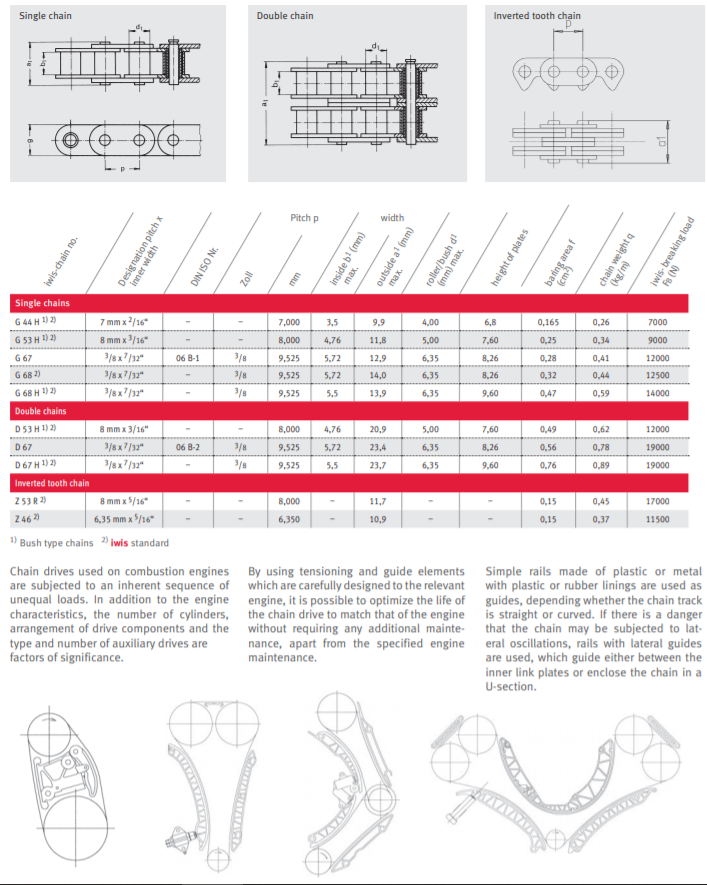
Los sistemas de transmisión por cadena se emplean para transmitir movimiento entre dos ejes paralelos que se encuentran alejados entre sí tal es el caso de las cadenas de distribución de motor que une el árbol de levas con el cigüeñal mediante el movimiento de los sprockets de los ejes del cigüeñal y árbol de levas y este movimiento lo permite en sincroniza gracias a la cadena que esta fabricada con fundiciones de acero gris así como acero fundido
Las transmisiones por cadena son menos sensibles a la suciedad y a la falta de mantenimiento. que los engranajes y otras unidades, también se pueden usar en altas temperaturas de funcionamiento Las cadenas de rodillos de acero se utilizan en todo Ingeniería. Se utilizan en la fabricación de máquinas herramientas, en la construcción de vehículos y motores.
Las ventajas que tienen las cadenas es que pueden tener distancias ilimitadas entre los centros de los ejes, así como un tamaño reducido y facilidad de ensamblaje, flexibilidad así como soportar altas temperaturas de operación y presión
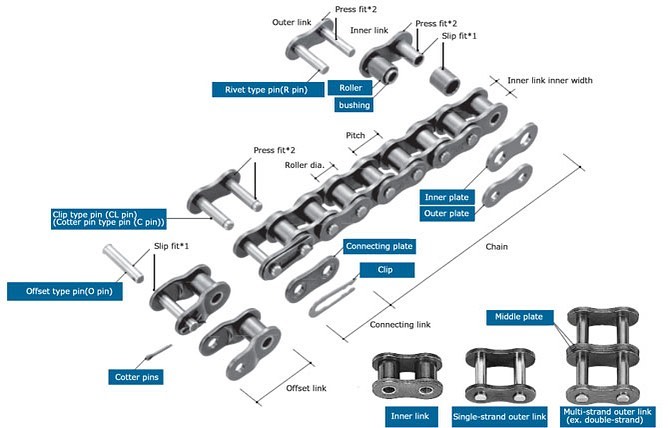
Componentes
Tipos de cadenas
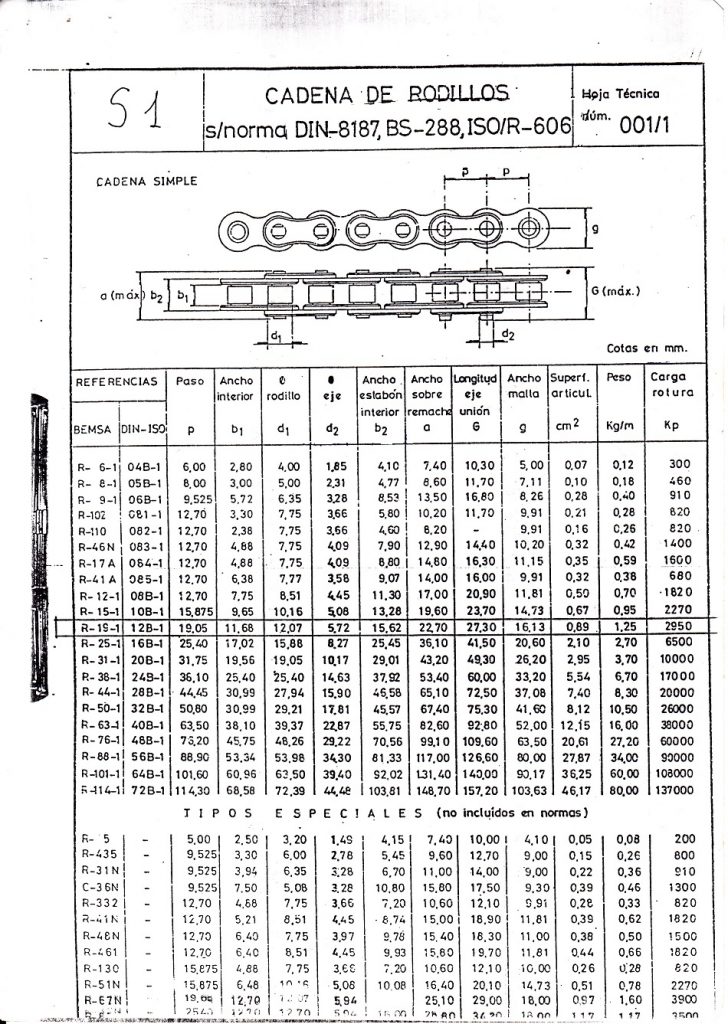
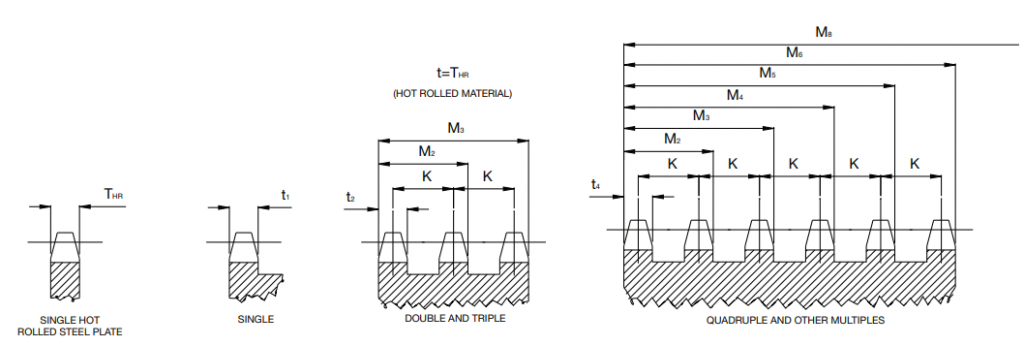
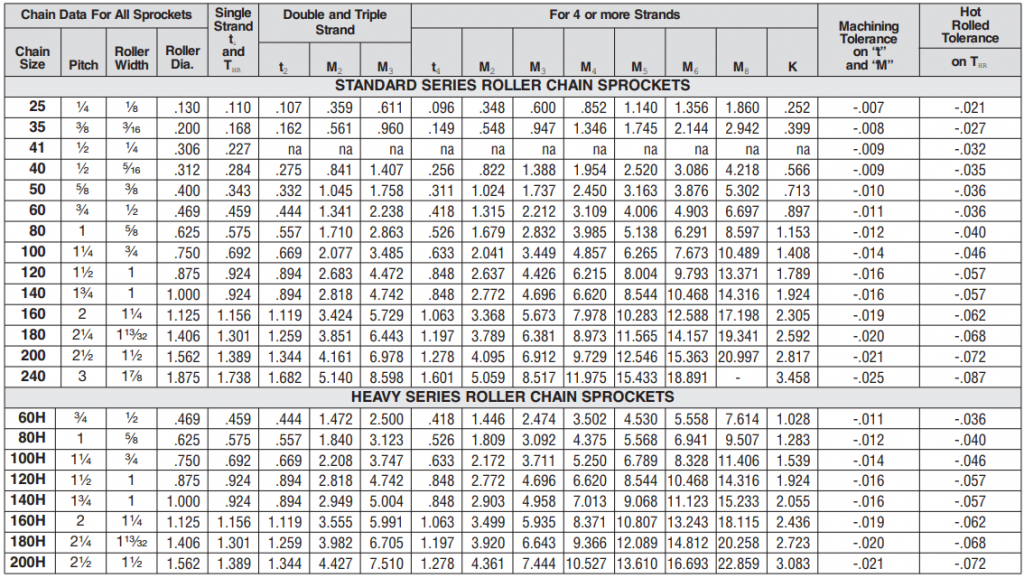
Medidas de cadenas
Diseño
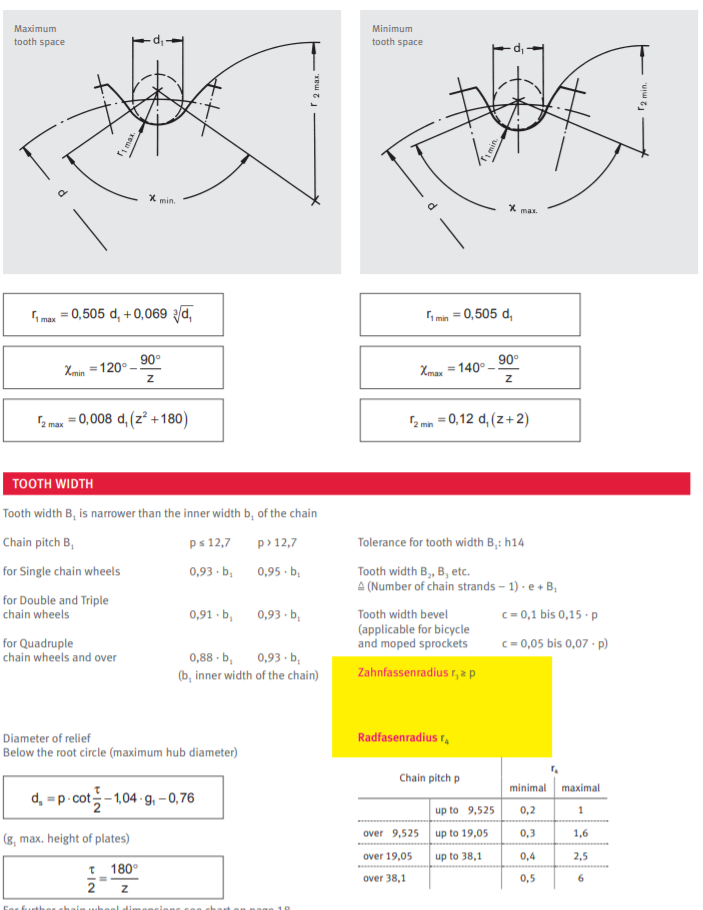
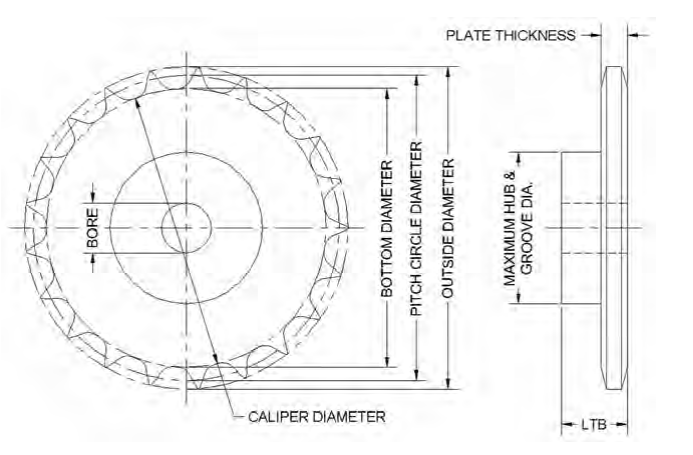
La forma de las ruedas de cadena está determinada por el tamaño de la cadena, número de dientes y el par a transmitir.
Ruedas con los cubos permiten la transmisión de un par más alto, mientras que la placa las ruedas solo pueden usarse para la transmisión de pares más pequeños.
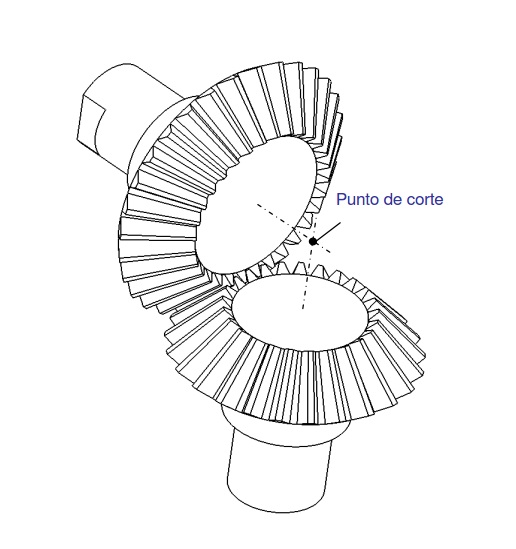
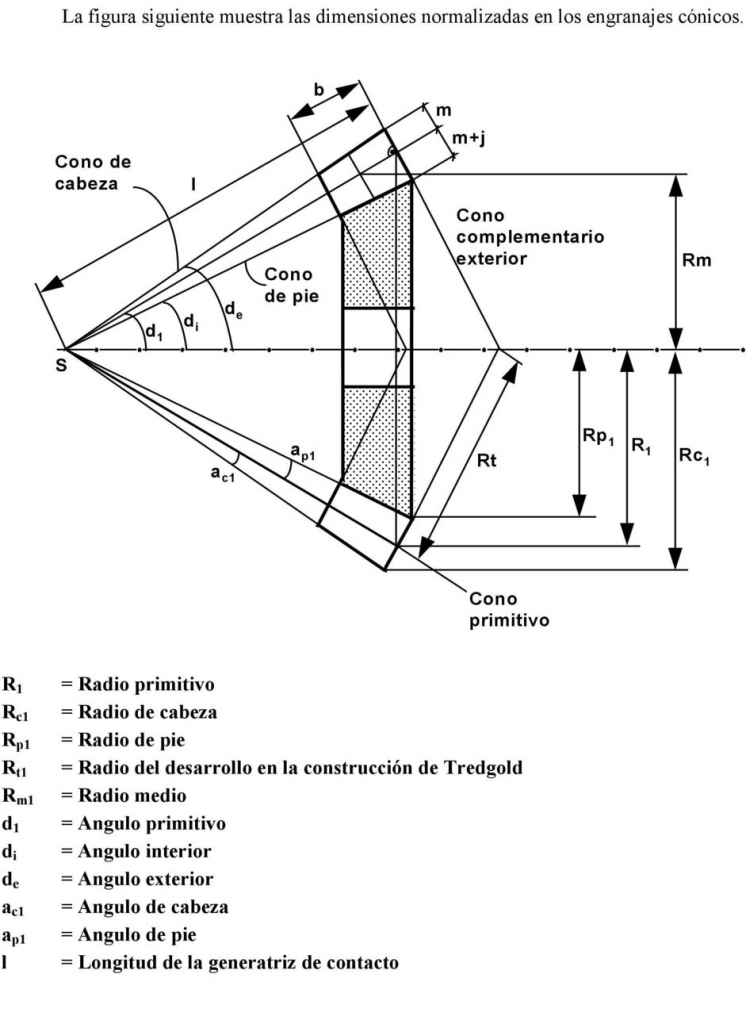
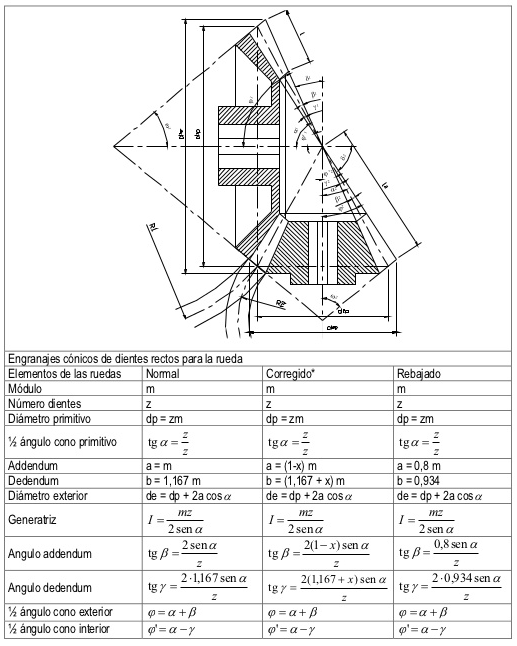
Los engranes cónicos son empleados comúnmente para transmision de potencia entre dos arboles cuyos ejes se cortan, Los ángulos pueden cortarse a cualquier ángulo, el más empleado es el de 90°.
Son muy parecidos a los conos rodantes que tienen el mismo ápice. Los dientes son de la misma forma que la de los dientes de engranes rectos, pero son un poco más delgados hacia el ápice del cono.
La ventaja de esto es que muchos términos de ángulos rectos aplica también para engranes cónicos
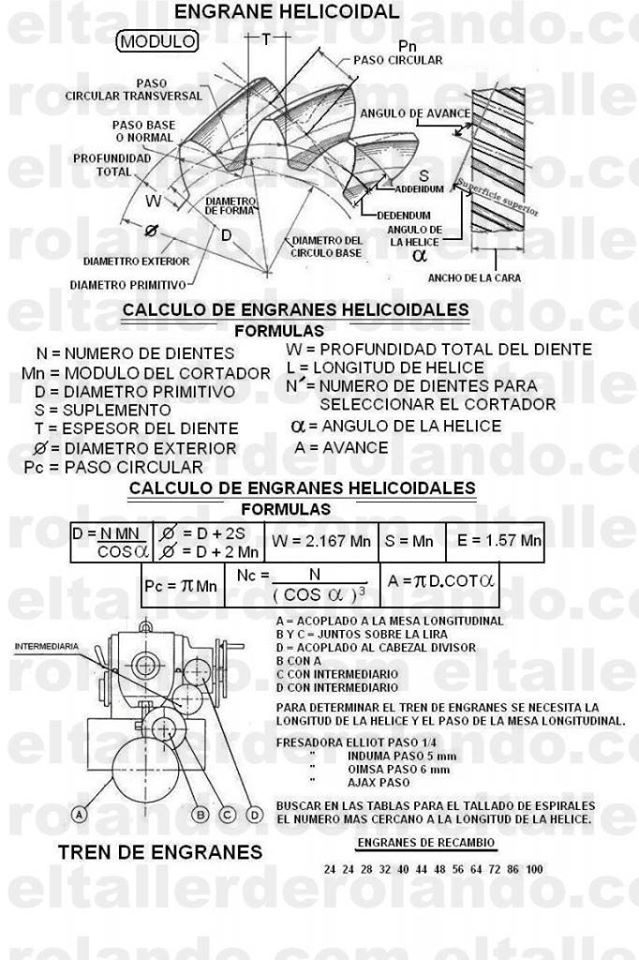
Los engranajes helicoidales y cónicos-helicoidales están diseñados para aplicaciones difíciles tales como los transportadores en la minería, plantas papeleras, extrusoras, coladas continuas o grúas de puertos.
Estos engranajes deben proporcionar un alto nivel de fiabilidad operativa en condiciones difíciles, como entornos calientes, húmedos y polvorientos, a velocidad muy baja y con cargas pesadas. El reto consiste en mejorar el rendimiento, haciendo posible al mismo tiempo una producción modular rentable.
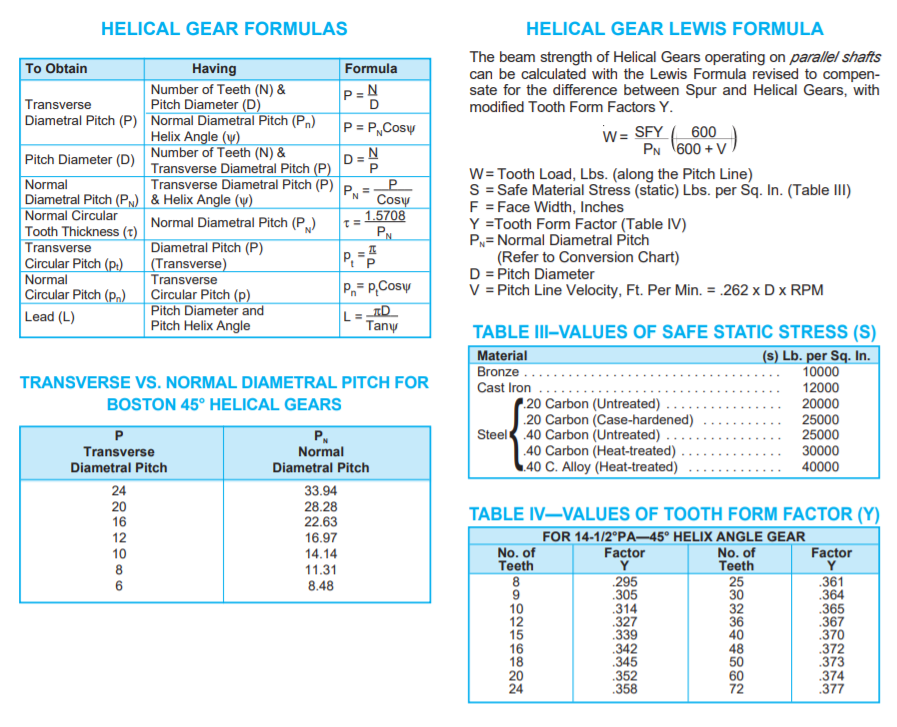
Los engranajes helicoidales ofrecen un refinamiento sobre los engranajes rectos. Los bordes de los dientes no son paralelos al eje de rotación, pero están posicionados en angulo. Ya que el engranaje es curvo, este angulo causa que la forma del diente pertenezca al segmento de una hélice. Engranajes helicoidales pueden ser acoplados en paralelo u orientación cruzada. La primera se refiere a cuando los ejes están en paralelo; esta es la orientación mas común. En la segunda, los ejes no son paralelos.
Para dientes en angulo se acoplan de manera mas gradual que los engranajes de diente recto lo que causa una operación mas suave y sin ruido.
En engranajes helicoidales paralelos, cada par de dientes hace contacto en un solo punto del engranaje; una curva móvil de contacto crece gradualmente a lo largo de la cara del diente hasta un cierto máximo después del cual disminuye hasta terminar contacto en un solo punto en el lado opuesto.
En engranajes rectos los dientes se acoplan súbitamente en una línea de contacto a lo largo de todo el ancho lo que causa stress y ruido. Engranajes rectos generan un sonido característico a altas velocidades y no pueden soportar tanta torsión como los engranajes helicoidales.
Mientras que engranajes de ángulo recto son usados en aplicaciones de baja velocidad y situaciones donde el control de ruido no es un problema, el uso de engranajes helicoidales es indicado cuando la aplicación requiere alta velocidad o gran transmisión de potencia.
Angulo
El ángulo β que forma el dentado con el eje axial deriva de la hélice, es importante considerar que el ángulo tiene que se igual para las dos ruedas que engranan pero de orientación contraria.
El valor se establece de acuerdo con la velocidad que tenga la transmisión:
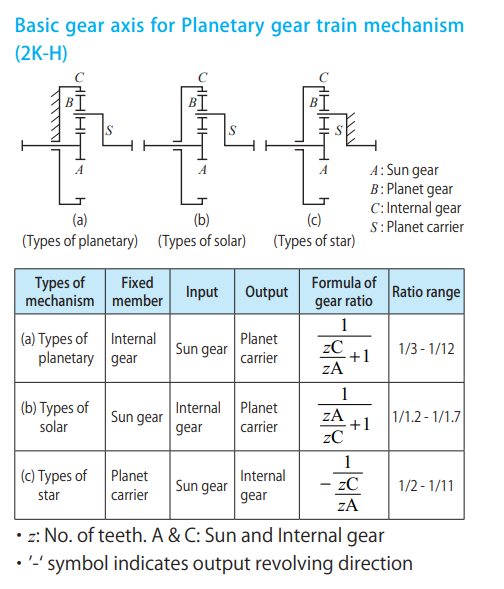
Los engranajes planetarios es un conjunto de engranajes con el eje de entrada y el eje de salida alineados. Se utiliza una caja de engranajes planetarios para transferir el mayor par en la forma más compacta (conocida como densidad de par).
El centro de aceleración de la bicicleta es un gran ejemplo de un mecanismo de rueda planetaria: ¿Alguna vez se ha preguntado cómo puede obtener tanta potencia y capacidades en un centro tan pequeño? Para un cubo de tres velocidades, se utiliza un sistema de engranaje planetario de una etapa, para un cubo de cinco velocidades de 2 etapas. Cada sistema de engranaje planetario tiene un estado de reducción, un acoplamiento directo y un modo de aceleración.
En términos matemáticos, la relación de reducción más pequeña es 3: 1, la más grande es 10: 1. En una relación de menos de 3, el engranaje solar se vuelve demasiado grande contra los engranajes del planeta. En una proporción superior a 10, la rueda solar se vuelve demasiado pequeña y el par caerá. Las relaciones son generalmente absolutas, es decir, un número entero.
¿Dónde se utilizan los sistemas de engranajes planetarios?
Los engranajes planetarios a menudo se usan cuando el espacio y el peso son un problema, pero se necesita una gran cantidad de reducción de velocidad y torque. Este requisito se aplica a una variedad de industrias, incluidos tractores y equipos de construcción, donde se necesita una gran cantidad de torque para conducir las ruedas. Otros lugares donde encontrará juegos de engranajes planetarios incluyen motores de turbina, transmisiones automáticas e incluso destornilladores eléctricos.
Los sistemas de engranajes planetarios pueden producir una gran cantidad de torque porque la carga se comparte entre múltiples engranajes planetarios. Esta disposición también crea más superficies de contacto y un área de contacto más grande entre los engranajes que un sistema de engranaje de eje paralelo tradicional. Debido a esto, en la carga se distribuye de manera más uniforme y, por lo tanto, los engranajes son más resistentes al daño.
La forma más básica de engranaje planetario implica tres conjuntos de engranajes con diferentes grados de libertad. Los engranajes planetarios giran alrededor de los ejes que giran alrededor de un engranaje solar, que gira en su lugar. Una corona dentada une los planetas en el exterior y está completamente fija. La concentricidad del planeta que se agrupa con el sol y los engranajes anulares significa que el par se realiza a través de una línea recta. Muchos trenes de potencia son «cómodos» alineados en línea recta, y la ausencia de ejes compensados no solo disminuye el espacio, sino que elimina la necesidad de redirigir la potencia o reubicar otros componentes.
En una configuración planetaria simple, la potencia de entrada gira el engranaje solar a alta velocidad. Los planetas, espaciados alrededor del eje central de rotación, se engranan con el sol y con la corona dentada fija, por lo que se ven obligados a orbitar a medida que ruedan. Todos los planetas están montados en un solo miembro giratorio, llamado jaula, brazo o portador. A medida que el porta planetas gira, ofrece una salida de baja velocidad y alto par.
Relación entre los engranajes en un sistema de engranajes planetarios
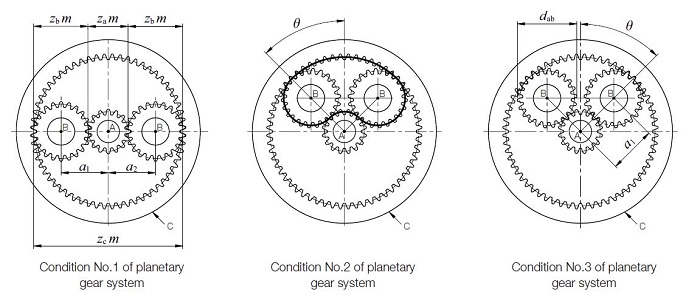
Para determinar la relación entre el número de dientes del engranaje solar (za), los engranajes planetarios B (zb) y el engranaje interno C (zc) y el número de engranajes planetarios N en el sistema, estos parámetros deben satisfacer el siguientes tres condiciones:
Condición No.1
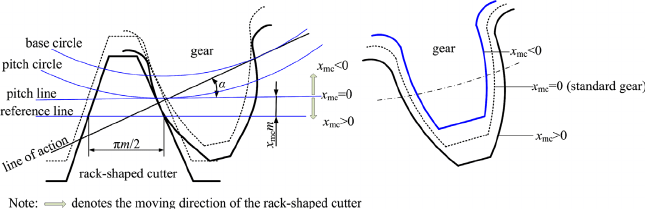
zc = za + 2 zb (17.1) Esta es la condición necesaria para que las distancias centrales de los engranajes coincidan. Dado que la ecuación es verdadera solo para el sistema de engranajes estándar, es posible variar el número de dientes usando diseños de engranajes desplazados de perfil. Para usar engranajes desplazados de perfil, es necesario hacer coincidir la distancia central entre el sol A y los engranajes del planeta B, a1, y la distancia central entre el planeta B y los engranajes internos C, α2. α1 = α2 (17.2)
Condición No.2
Esta es la condición necesaria para colocar engranajes planetarios espaciados uniformemente alrededor del engranaje solar. Si se desea una colocación desigual de engranajes planetarios, entonces se debe satisfacer la ecuación (17.4).
Donde θ : la mitad del ángulo entre engranajes planetarios adyacentes (°)
Condición No.3
Satisfacer esta condición asegura que los engranajes planetarios adyacentes puedan operar sin interferir entre sí. Esta es la condición que debe cumplirse para un diseño de engranaje estándar con la misma colocación de engranajes planetarios. Para otras condiciones, el sistema debe satisfacer la relación:
Donde: dab: Diámetro de la punta de los engranajes planetarios α1: Distancia central entre el sol y los engranajes planetarios Además de las tres condiciones básicas anteriores, puede haber un problema de interferencia entre el engranaje interno C y los engranajes del planeta B. Vea la Sección 4.2 Engranajes internos
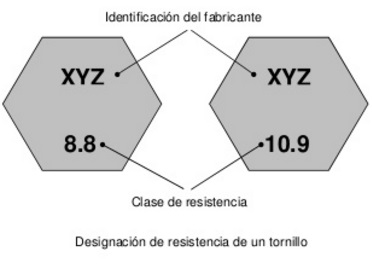
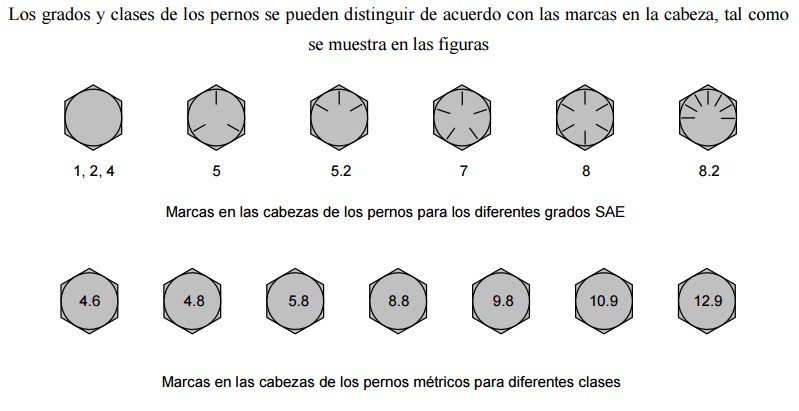
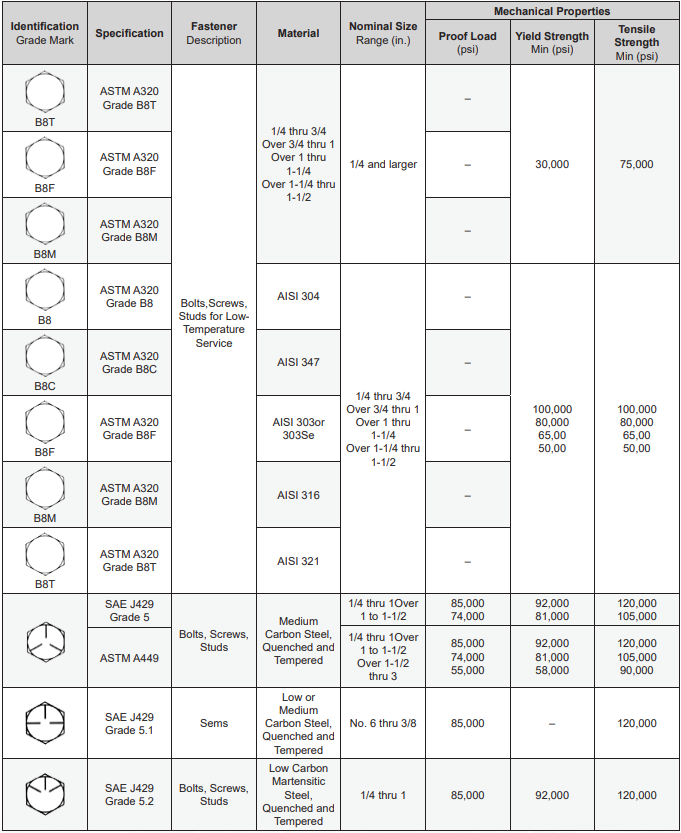
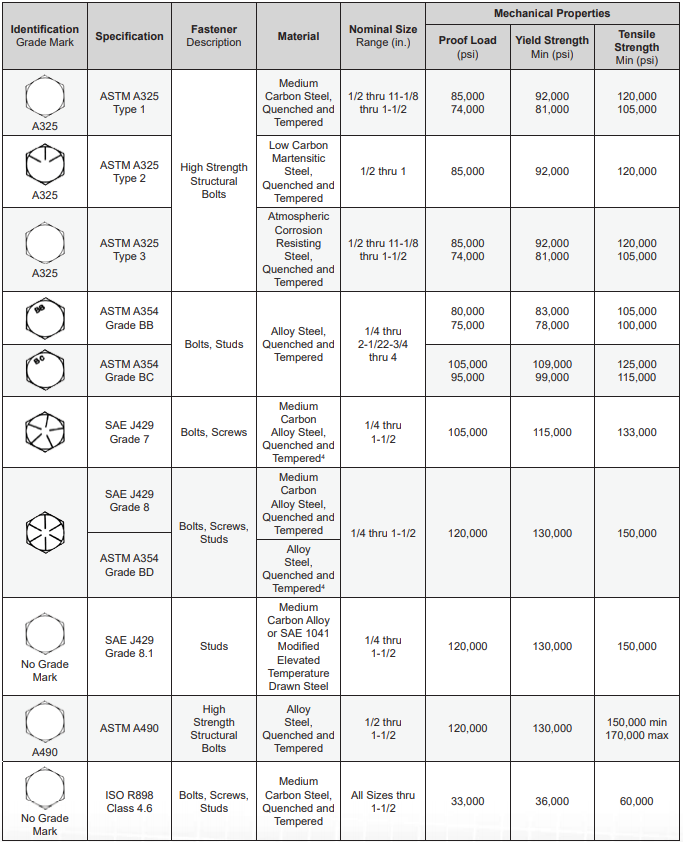
La clase de resistencia de los tornillos según ISO 898-1 viene definida en tablas y está marcada en la cabeza del tornillo convencionalmente. La resistencia a la tracción es la resistencia al estiramiento ocasionado por la fuerza de apriete que se produce al girarlo. En la cabeza de los tornillos también se especifica la dureza o el grado del tornillo, dependiendo del material utilizado y la aplicación que se le dará al tornillo, según las unidades métricas que se estén utilizando y la aplicación del tornillo así será su grado, en la Figura 14 se observa la equivalencia del grado en el sistema inglés, el sistema métrico y para los tornillos estructurales.
También existe el grado 12, sistema inglés y 12.9 sistema métrico, para la fabricación de estos tornillos se utilizan aceros súper aleados y se identifican con ocho líneas marcadas en la cabeza del tornillo, sistema inglés y con el número 12.9 en el sistema métrico. La clase de resistencia de los tornillos según ISO 898-1 viene definida en tablas y está marcada en la cabeza del tornillo convencionalmente. La resistencia a la tracción es la resistencia al estiramiento ocasionado por la fuerza de apriete que se produce al girarlo.
El tornillo se identifica con el siguiente código para designar sus propiedades:
La primera cifra se multiplica por cien (100) obteniendo el valor de la resistencia a la tracción. Unidades dimensionales en N/mm2 – newton por milímetro cuadrado -.
La segunda cifra es diez (10) veces el cociente del límite elástico inferior (o límite elástico convencional al 0.2%) y a la resistencia a la tracción.
Las dos cifras separadas multiplicadas por diez (10) no dan el valor del límite elástico aparente en N/mm2.
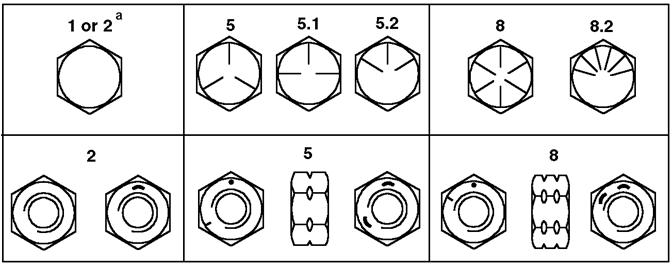
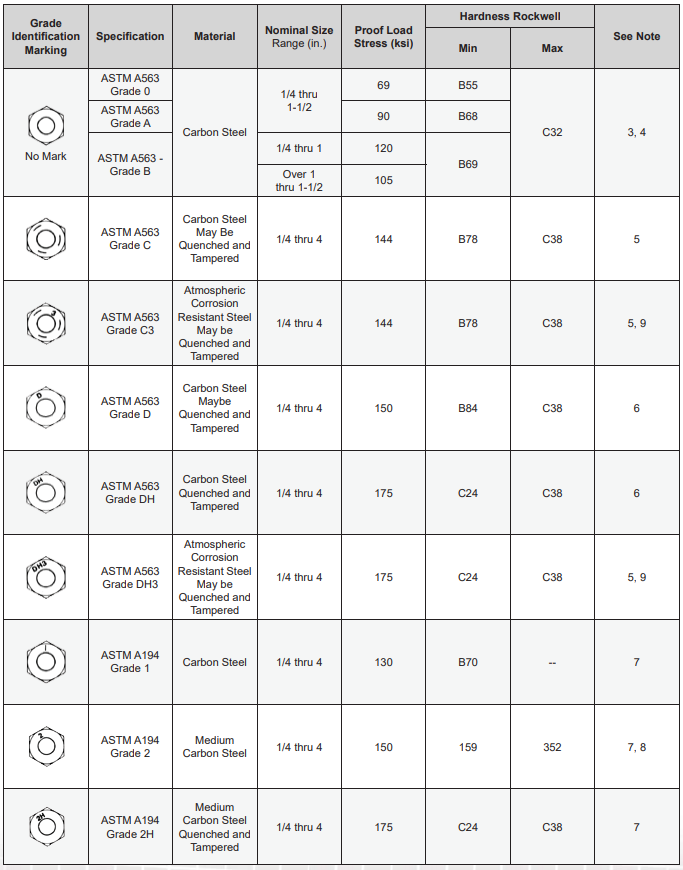
Además del marcado de grado indicado, todos los grados, excepto A563 grados O, A y B, deben marcarse para la identificación del fabricante.
Las marcas que se muestran para todos los grados de tuercas A194 son para tuercas forjadas en frío y forjadas en caliente. Cuando las tuercas se mecanizan a partir de material de barra, la tuerca debe marcarse adicionalmente con la letra ‘B’.
No se requiere que las tuercas estén marcadas a menos que el comprador lo especifique Cuando está marcado, la marca de identificación debe ser la letra de grado O, A o B.
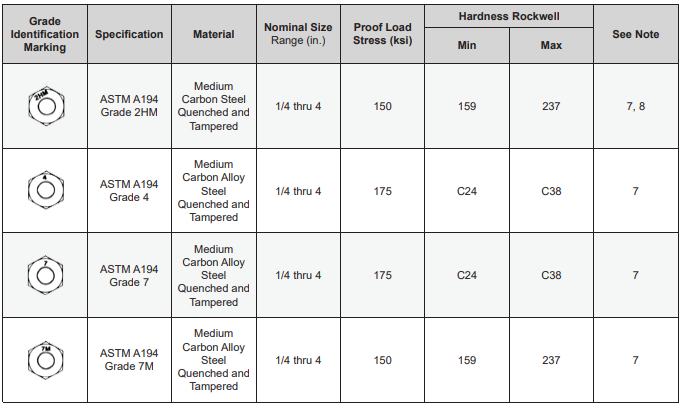
Las propiedades que se muestran son las de las tuercas hexagonales de rosca gruesa no revestidas o no revestidas.
Las propiedades que se muestran son las de tuercas hexagonales pesadas de rosca gruesa.
Las propiedades que se muestran son las de tuercas hexagonales pesadas de rosca gruesa.
Las propiedades que se muestran son las de tuercas hexagonales gruesas de rosca gruesa de 8 pasos.
Las durezas son números de dureza Brinell.
El fabricante de la tuerca, a su elección, puede agregar otras marcas para indicar el uso de acero resistente a la corrosión atmosférica.
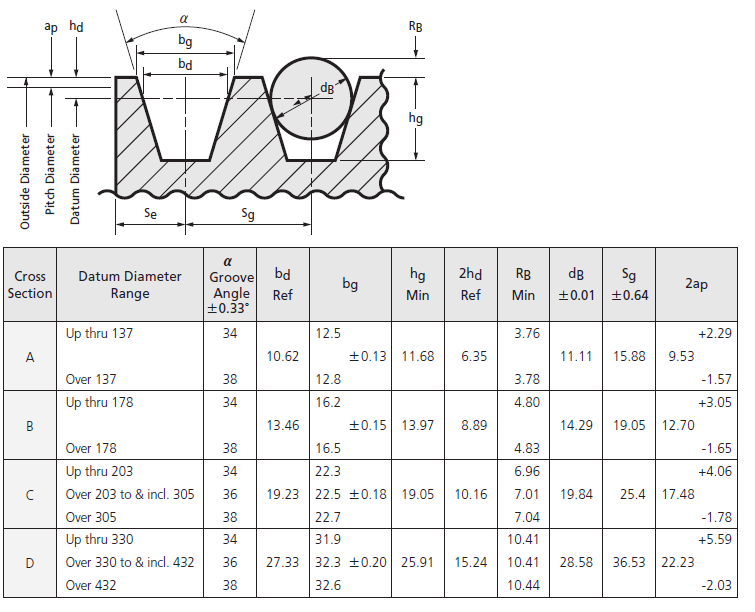
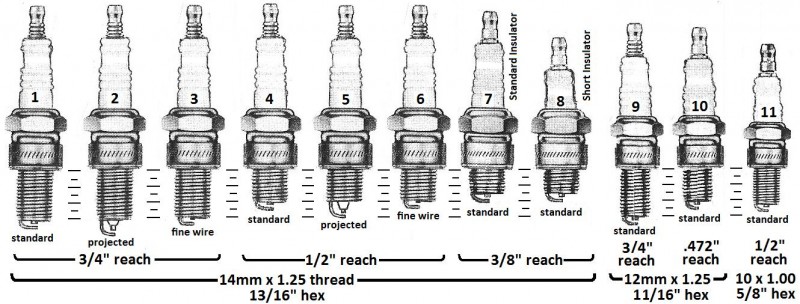
Las Roscas de bujías según algunas normas como ISO 28741 esta hechas a mediante la norma métrica aunque también están en pulgadas y se aplica en Vehículos de carretera como ya sabemos las las roscas de las bujías van maquinadas en la culata del motor para asì cumplir con su función las dimensiones son las siguientes
Las ruedas dentadas o sprockets son piezas giratorias con dientes que se usan junto con una cadena y, casi siempre, al menos una con otra. Piñón para transmitir el par. Los sprockets y la cadena se pueden usar para cambiar la velocidad, el par o la dirección original de un motor.
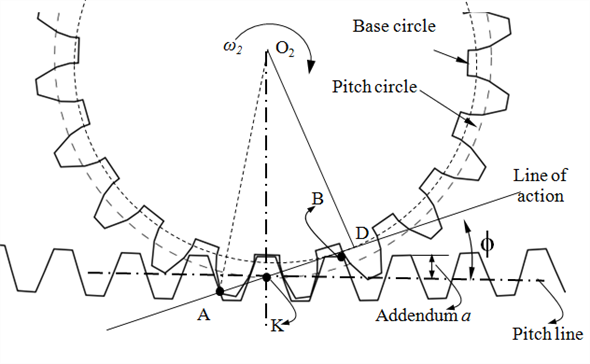
La forma del diente de una rueda dentada se deriva de la trayectoria geométrica descrita por el rodillo de la cadena a medida que se mueve a través de la línea de cabeceo y el círculo de cabeceo para una rueda dentada y un paso de cadena determinados. La forma de la forma del diente está matemáticamente relacionado con el paso de cadena (P), el número de dientes en la rueda dentada (N) y el Diámetro del rodillo (Dr). Las fórmulas para la curva de asiento, el radio R y el radio de la curva de cobertura F Incluya los espacios libres necesarios para permitir un acoplamiento suave entre los rodillos de la cadena y la rueda dentada dientes.
Tipos de eje de Sprocket
Tipo de eje indica el núcleo de la rueda dentada. Cada tipo está diseñado para una necesidad específica.
El tipo A no tiene un eje como parte de la rueda dentada. La rueda debe montarse en una brida, eje u otro dispositivo de sujeción.
El tipo B tiene el eje que se extiende a un lado de la rueda. Este tipo se encuentra generalmente en piñones de tamaño pequeño e intermedio.
El tipo C tiene un eje de igual longitud en ambos lados de la rueda. El tipo C generalmente se encuentra en piñones de gran diámetro o muy pesados.El tipo C también es más común para piñones de clase de ingeniería.
C Offset indica un cubo de dos lados que está descentrado porque las longitudes del eje no son iguales
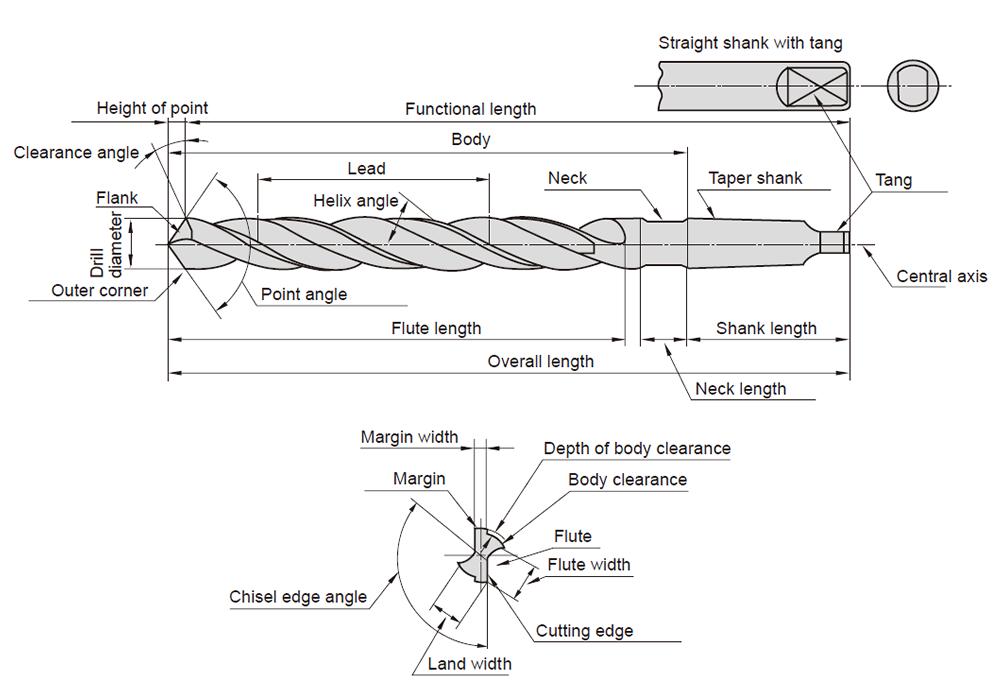
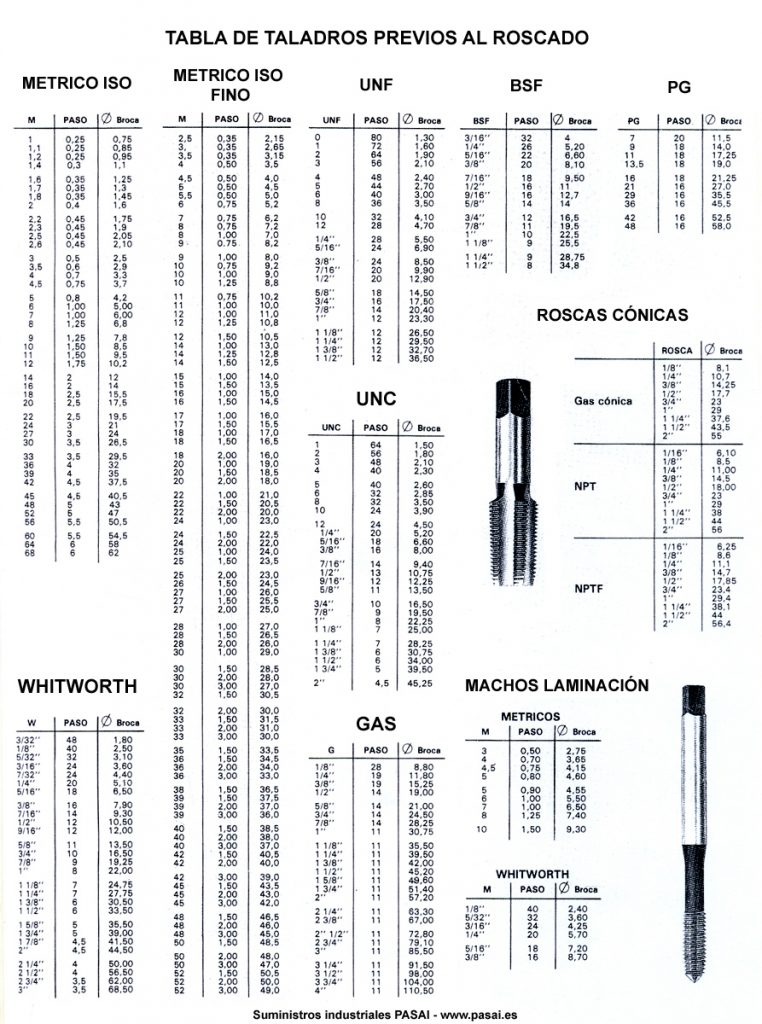
Una broca es una herramienta metálica de corte que crea orificios y a su vez perforaciones circulares en diversos materiales cuando se coloca en herramientas como taladro, berbiquí u otra máquina como destornilladores de impacto e inclusive fresadoras . Su función es formar un orificio o cavidad cilíndrica.
Las brocas generalmente poseen razones elevadas de longitud a diámetro, de ahí su capacidad de manufacturar barrenos relativamente profundos. to hace que las brocas tengan ciertas propiedades de deformación plástica por su cierta flexibilidad y tienden a provocar rupturas o provocar barrenos con dimensiones incorrectas.
El diámetro del barreno hecho por el taladro es un poco mayor que el de la broca, como puede notarse al mirar que una broca se retira con facilidad de la perforación que se manufacturo.
Broca convencional o de giro
La broca de giro es la mas convencional, la geometría del punto de la broca es tal que el angulo de ataque es normal y la velocidad del borde que es cortante son diferentes con la longitud desde el centro de la broca.
En las ranuras que tiene la broca que forman un tipo espiral se ocupan para drenar la viruta producida por el proceso que se le esta dando a la pieza, aquí funciona como un canal de la punta de la broca hacia arriba o afuera expulsándolas y que estas puedan seguir expulsando mas material y no se atasque, también permiten que el fluido de corte alcance los bordes cortantes.
Las brocas por naturaleza de ellas mismas tienden a dejar viruta en la superficie inferior de la parte perforada y frecuentemente se necesitan otro cierto de operaciones para evitar estas.
Las brocas también deben ser diseñadas de tal manera que sean rompe virutas es decir que sea capaz de estar cortando virutas a ciertas longitudes esto para evitar que las virutas sean muy largas y no haya problemas con la maquina
Los ángulos con los cuales son diseñadas las brocas por lo general buscan evitar calentamiento y que se optimice el corte y paso de viruta.
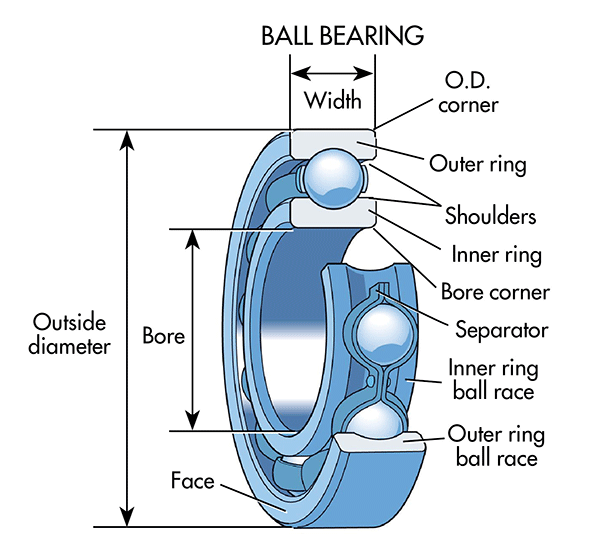
Los rodamientos/baleros/cojinetes es un dispositivo mecánico que facilita el movimiento y reduce la fricción entre componentes/ entre el eje y las piezas que están conectadas a el
En los rodamientos el movimiento rotativo, según el sentido del esfuerzo que soporta, puede ser axial, radial, o una combinación de ambos.
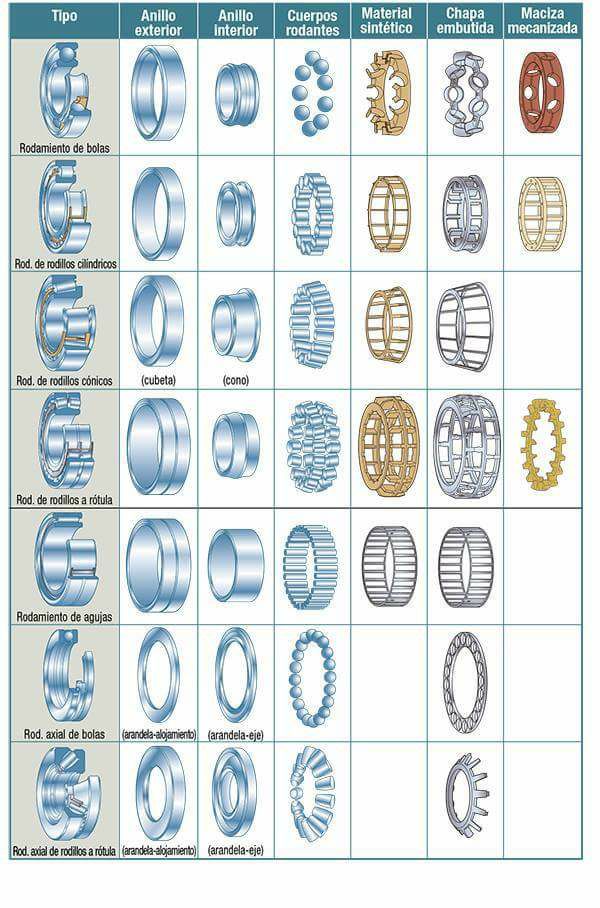
Tipos de rodamientos
Un rodamiento radial es el que soporta esfuerzos radiales, que son esfuerzos de dirección normal a la dirección que pasa por el centro de su eje, como por ejemplo una rueda; es axial si soporta esfuerzos en la dirección de su eje, como por ejemplo en los quicios o bisagras de puertas y ventanas; y axial-radial si los puede soportar en los dos, de forma alternativa o combinada.
Tipos de rodamientos
Rígido de bolas: se usa en un amplio número de productos. Su diseño es sencillo, no es posible desmontarlo y se caracteriza por poder funcionar a velocidades considerablemente altas sin requerir un mantenimiento muy estricto o frecuente. Además, las bolas de su estructura benefician la transmisión de la potencia. Su popularidad se debe también a su bajo precio;
Bolas de contacto angular: su diseño está pensado de forma tal que la presión que ejercen las bolas (que se presentan en una única hilera) se aplica en un ángulo oblicuo al eje, lo cual vuelve este tipo de rodamiento muy adecuado para las cargas axiales considerables, y también las radiales. Si se desea que la máquina reciba la carga axial en sentido contrario, entonces es necesario montar el rodamiento contrapuesto a otro;
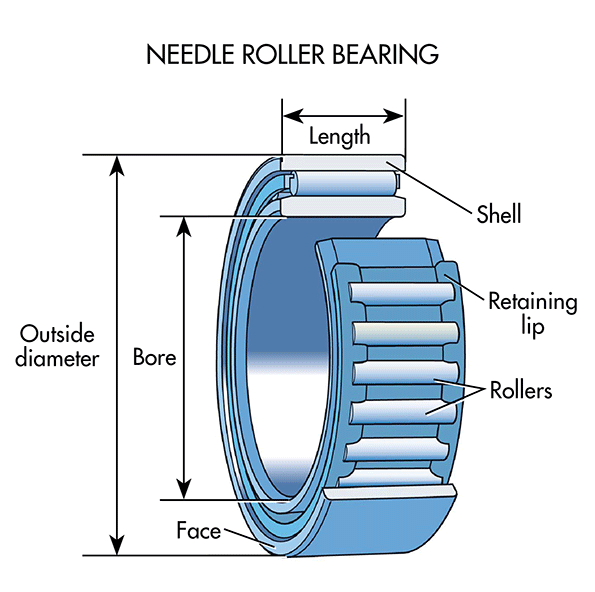
De agujas: posee rodillos de forma cilíndrica, largos y muy finos. Si bien su sección es de un tamaño discreto, su capacidad de carga es muy grande y se usa muy a menudo cuando no existe un gran espacio radial. Una de sus aplicaciones más comunes es la estructura de los pedales de bicicletas;
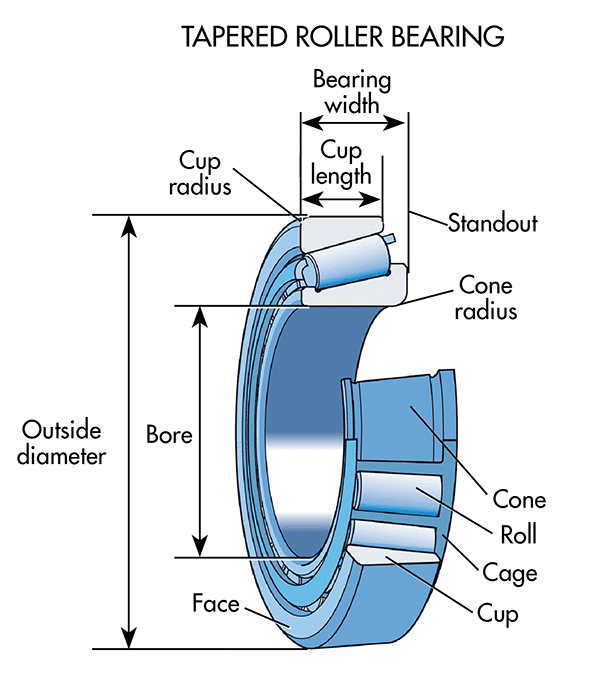
Rodillos cónicos: se trata de un modelo especialmente apto para soportar cargas axiales y radiales de forma simultánea, dado que sus caminos de rodadura y sus rodillos se encuentran en un ángulo oblicuo. También existe una versión con un ángulo muy abierto que se utiliza cuando la carga axial es considerable. Cabe mencionar que este rodamiento puede desmontarse, dejando por separado los aros interior y exterior, así como los rodillos;
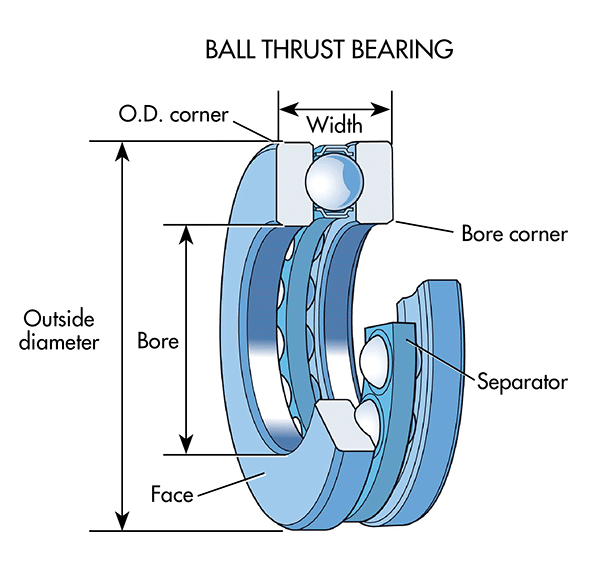
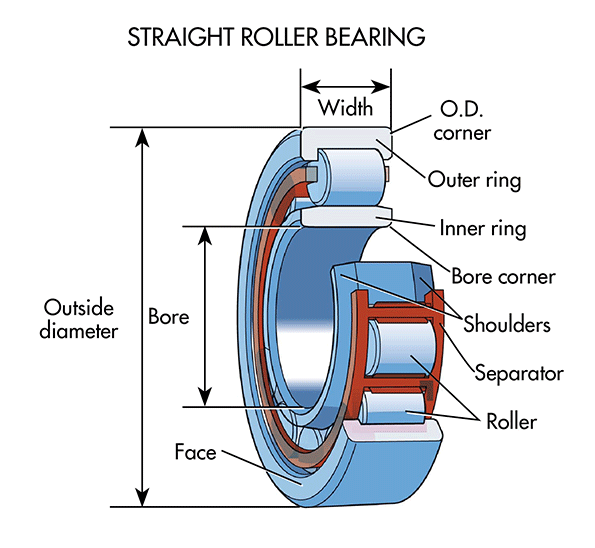
Rodillos cilíndricos de empuje: entre sus características principales se encuentra su especial resistencia a las cargas axiales de gran peso, su insensibilidad a los choques, su fuerza y el hecho de demandar poco espacio axial. Sólo pueden admitir una dirección de cargas axiales. Este tipo de rodamiento se usa especialmente para reemplazar modelos que utilizan bolas de empuje incapaces de aceptar las cargas necesarias;
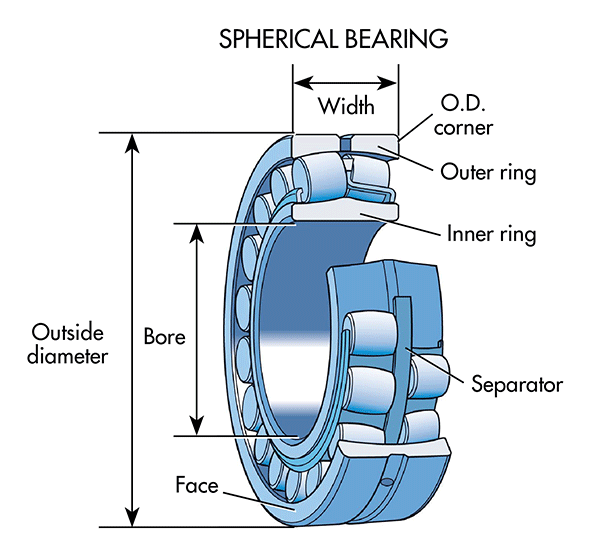
Rodillos a rótula: posee una fila de rodillos ubicados de forma oblicua, que giran sobre el aro, el cual se apoya en el soporte correspondiente. Una pestaña del aro guía los rodillos en su movimiento de rotación. Como resultado, este tipo de rodamiento es muy adecuado para soportar pesadas cargas. Su alineación es manual y cuenta con una velocidad de giro muy alta, incluso cuando la carga es considerable. A diferencia de otras clases de rodamiento axial, éste tiene la capacidad de hacer frente a cargas radiales.
Los rodamientos de bolas a rótula, los rodamientos de una hilera de bolas y los rodamientos de agujas de empuje son otros de los que se emplean con frecuencia en diferentes máquinas, como los motores, transmisiones, sistema de suspensión entre otros elementos mecánicos automotrices
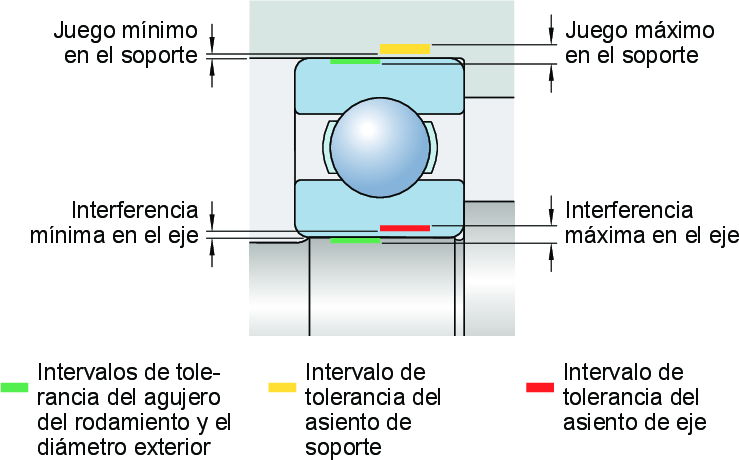
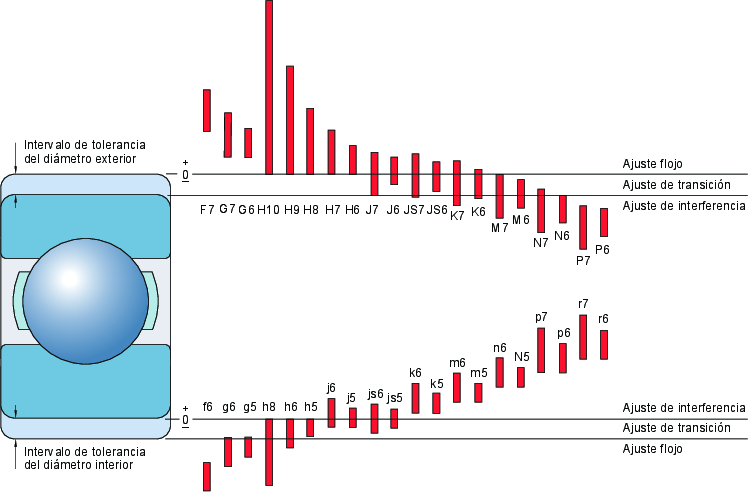
Ajuste de rodamientos
El ajuste en los rodillos ayuda principalmente con su nomenclatura a identificar que posición y juego lleva el rodamiento al entrar en contacto con la pieza en donde se va a ensamblar, se indica una tolerancia de juego axial y esta va determinado por el fabricante del mecanismo y del rodamiento para dar el funcionamiento adecuado que requiere el ensamblaje
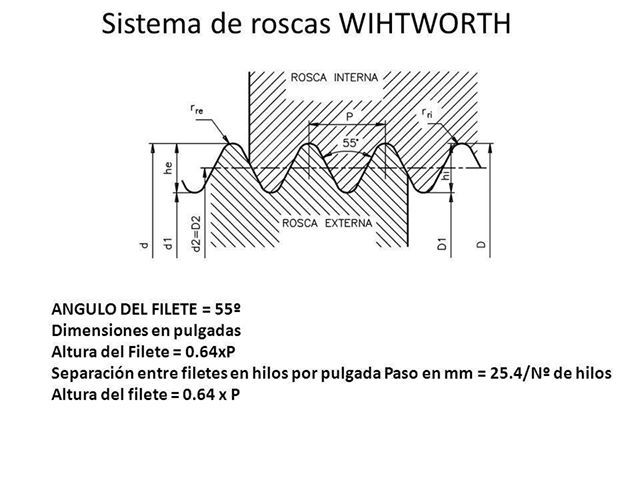
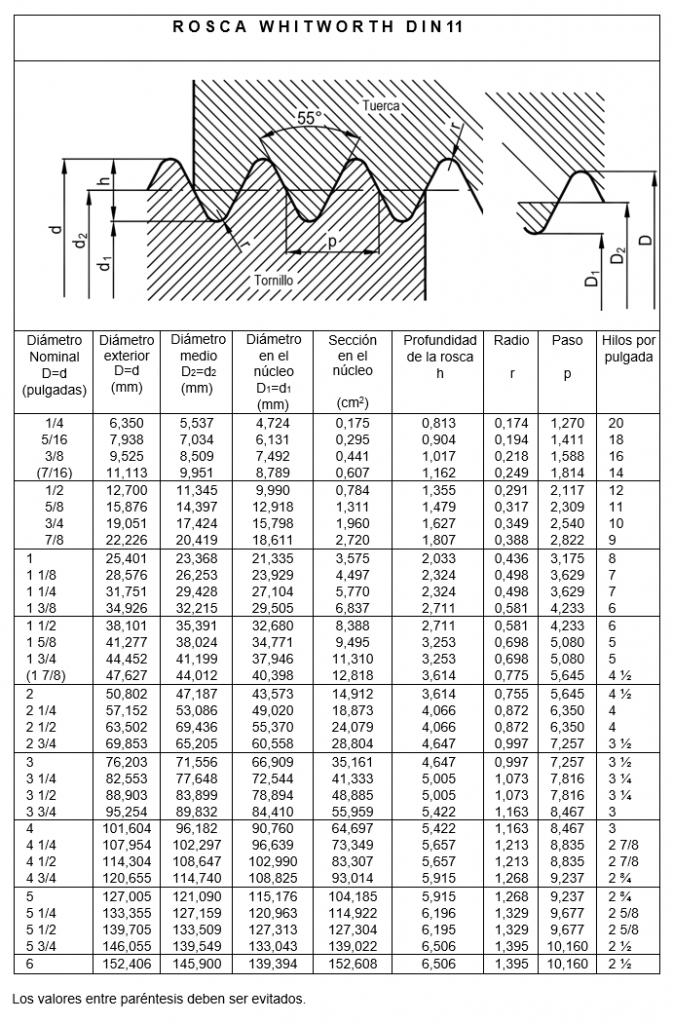
El sistema Whitworth, normalizado en Francia con el nombre de paso de gas, es la forma de rosca de mayor antigüedad conocida. Es debida a Joseph Whitworth, que la hizo adoptar por el instituto de ingenieros civiles de Inglaterra en 1841. Sus dimensiones básicas se expresan en pulgadas inglesas. Su forma y dimensiones aparecen detalladas en la norma DIN 11.
El sistema de roscas Whitworth se utiliza, para reparar la maquinarias antiguas y tiene un filete de rosca más grueso que el filete de rosca métrico.
Roscas de unión para tubería
Rosca normal británica para tubería (BSP) o rosca “gas”
Derivada de la rosca Whitworth original (con poco uso en la actualidad) tiene forma de triángulo isósceles y el ángulo que forman los flancos de los filetes es de 55º. El lado menor del triángulo es igual al paso, y las crestas y valles son redondeados. El diámetro nominal o exterior de la rosca se expresa en pulgadas, y el paso está dado por el número de hilos contenidos en una pulgada, por lo que se expresa en hilos por pulgada.
Rosca normal británica
Se usa comúnmente en plomería de baja presión, aunque no se recomienda para sistemas hidráulicos de media y alta presión. De acuerdo a su diseño presenta dos variantes:
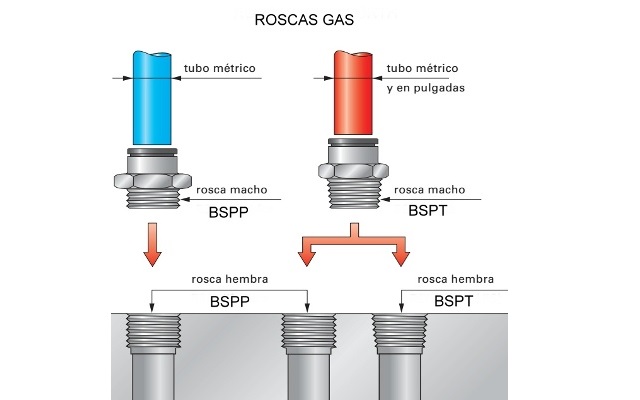
Rosca cilíndrica (o recta o paralela, BSPP): se monta en el mismo roscado cilíndrico. La estanqueidad queda asegurada por una junta tórica o arandela. Se denomina con la letra G seguida del diámetro nominal del tubo en pulgadas según norma ISO 228-1. Por ejemplo:
G 7
Rosca cónica (BSPT): se monta en el mismo roscado cilíndrico o cónico. La estanqueidad queda asegurada por un recubrimiento previo en la rosca. Se denomina con la letra R seguida del diámetro nominal del tubo en pulgadas según norma ISO 7-1. Por ejemplo:
R 1/8
La figura de abajo representa las conexiones y compatibilidades entre los tipos de roscas BSPP y BSPT.
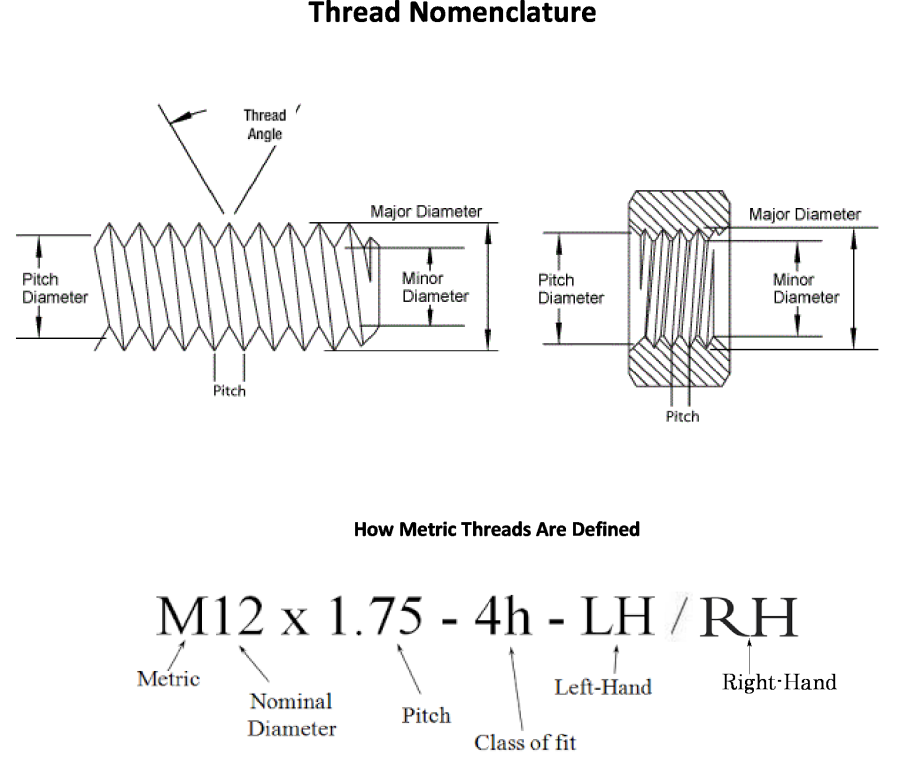
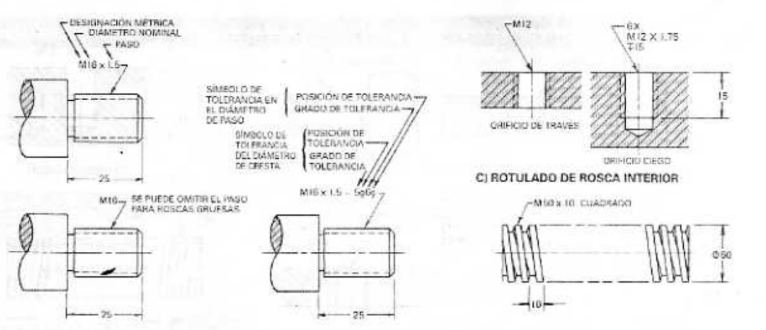
Las roscas métricas ya sena internas o externas, gruesa o fina se encuentran en la mayoría de las uniones de elementos y ensambles ya sen automotrices principalmente en nuestra rama o en casi todo lo que podemos ver a nuestro al rededor, esta clase de sujetadores son los más comunes por su simplicidad y utilizado en la mayor parte del mundo
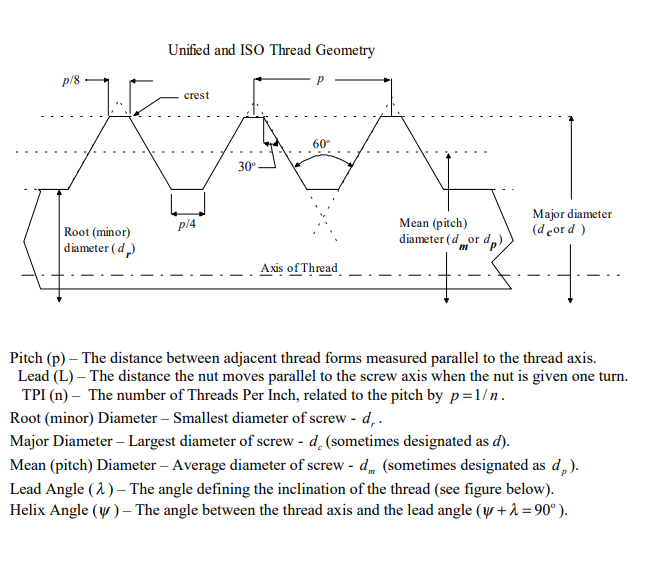
La clasificación de las roscas métricas se dan por el paso o pitch de las roscas métricas no es mas que la distancia entre puntos en dientes adyacentes
Las roscas métricas se determinan o clasifican en una mezcla de paso diametral (pitch) que se caracteriza una de otra por el paso aplicado para la especificación del diámetro
Como en todos los tipos de cuerdas existentes hay diferentes tipos ya sea en unidad de medida en lado de acoplamiento y diseño de estas
Tipos de roscas por entradas: Sencillas, dobles y triples
Sentido de acoplamiento de rosca
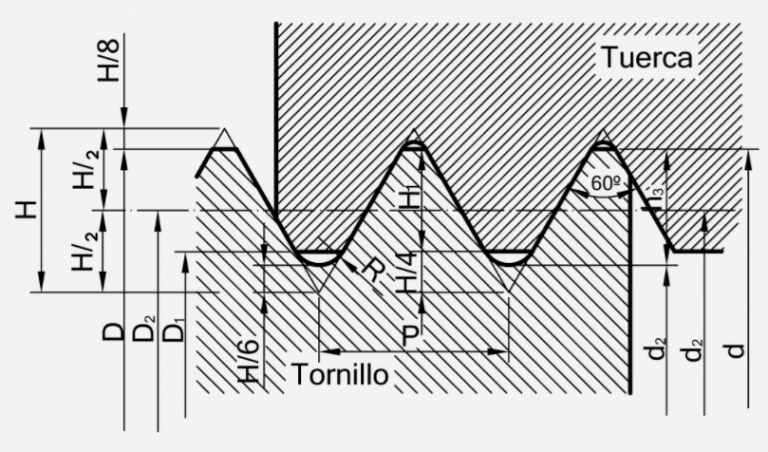
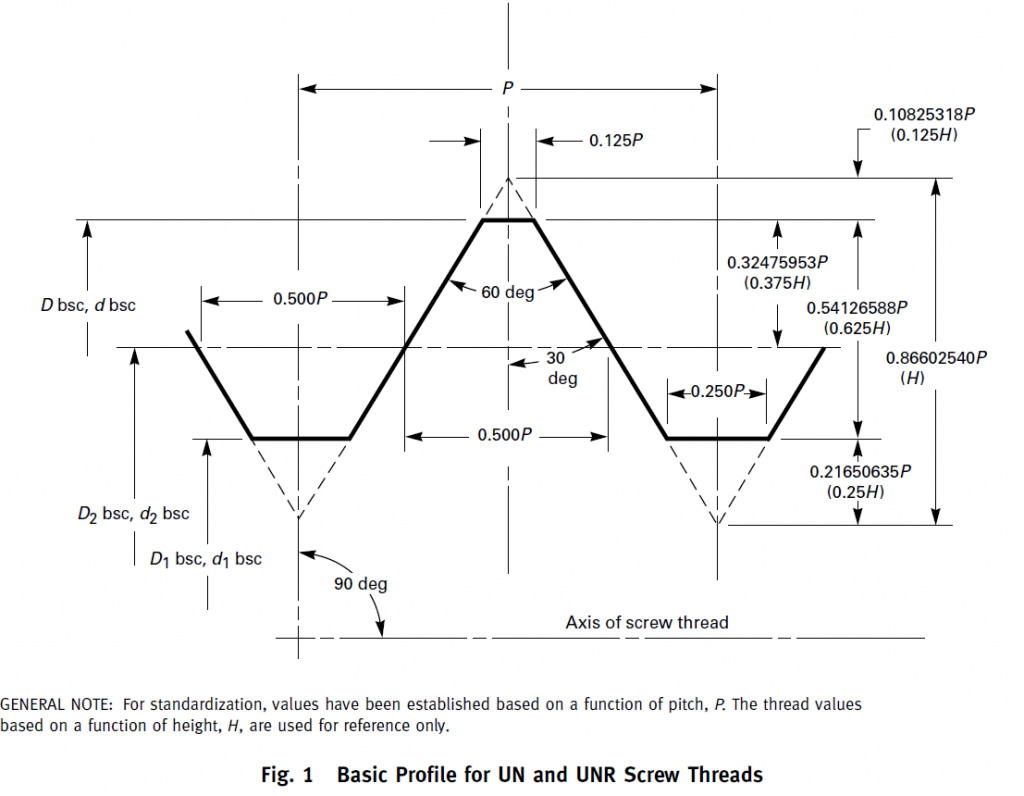
Diámetro nominal: D = d Paso: P D1 = d2 – 2 · (H/2 – H/4) = d – 2·H1 = d – 1,082532·P Diámetro de francos: D2 = d2 = d – 3/4 · H = d – 0,649519 · P Diámetro del núcleo: d3 = d2 – 2 · (H/2 – H/6) = d – 1,226869 · P Diámetro del núcleo: d3 = d1 – H/6 (según la norma DIN ISO 724) H = (raiz(3)/2)·P = 0,866025 · P Profundidad portante de rosca: H1 = (D – D1)/2 = 5/8 · H = 0,541266·P Profundidad de rosca: h3 = (d – d3)/2 = 17/24 · H = 0,613435·P Radio fondo de rosca: R = H/6 = 0,144338 · P
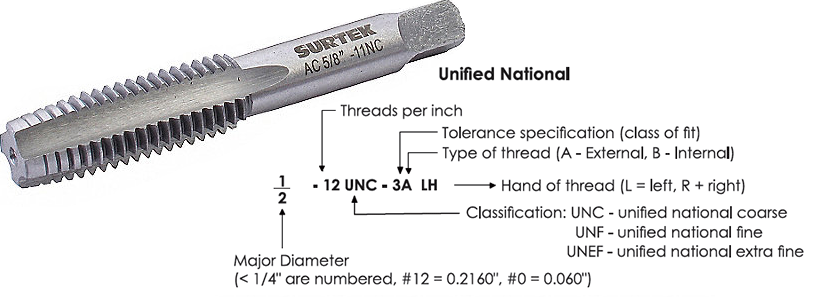
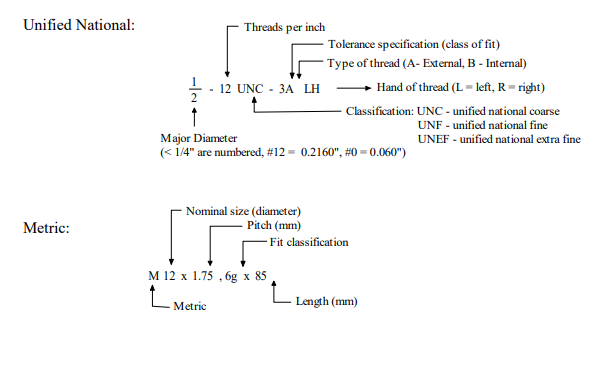
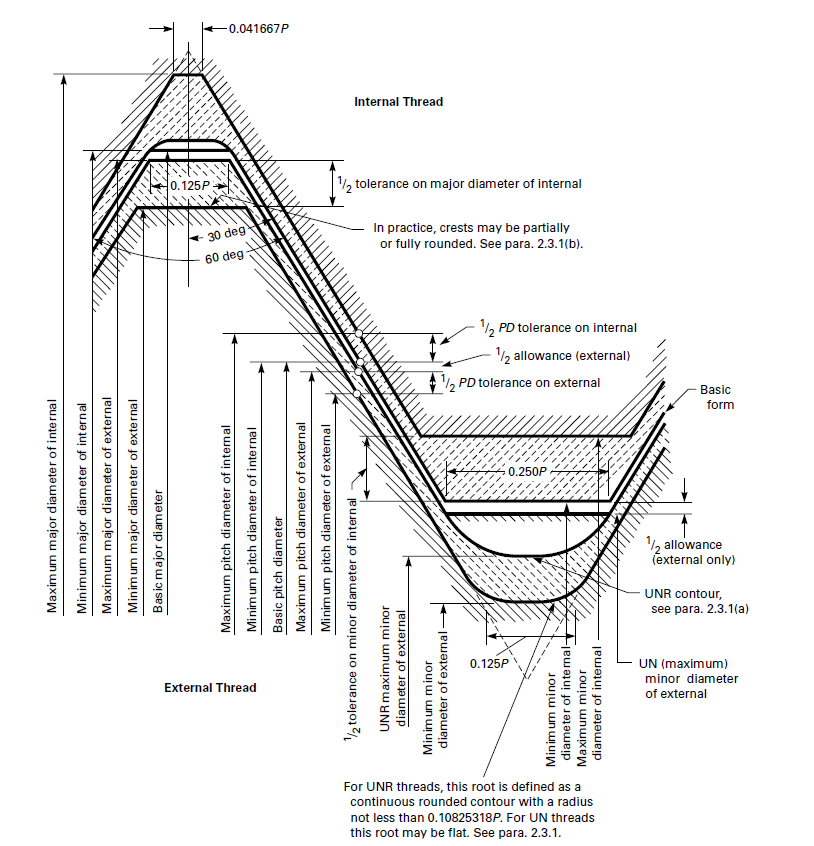
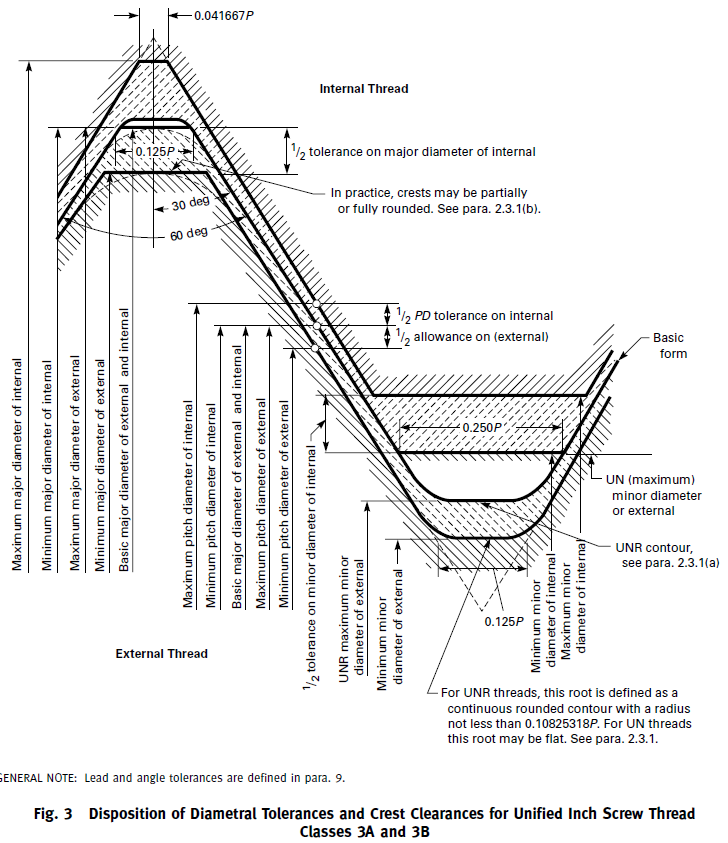
En este pequeño articulo nos enfocaremos en las cuerdas estándar unificadas que no es mas que una norma que aplica para los tornillos en medida estándar, y que muchas veces es un poco complicada entender a lo que nos hace referencia, es por ello que aprenderás en esta ocasiona su nomenclatura así como la forma en que debes diseñarlos
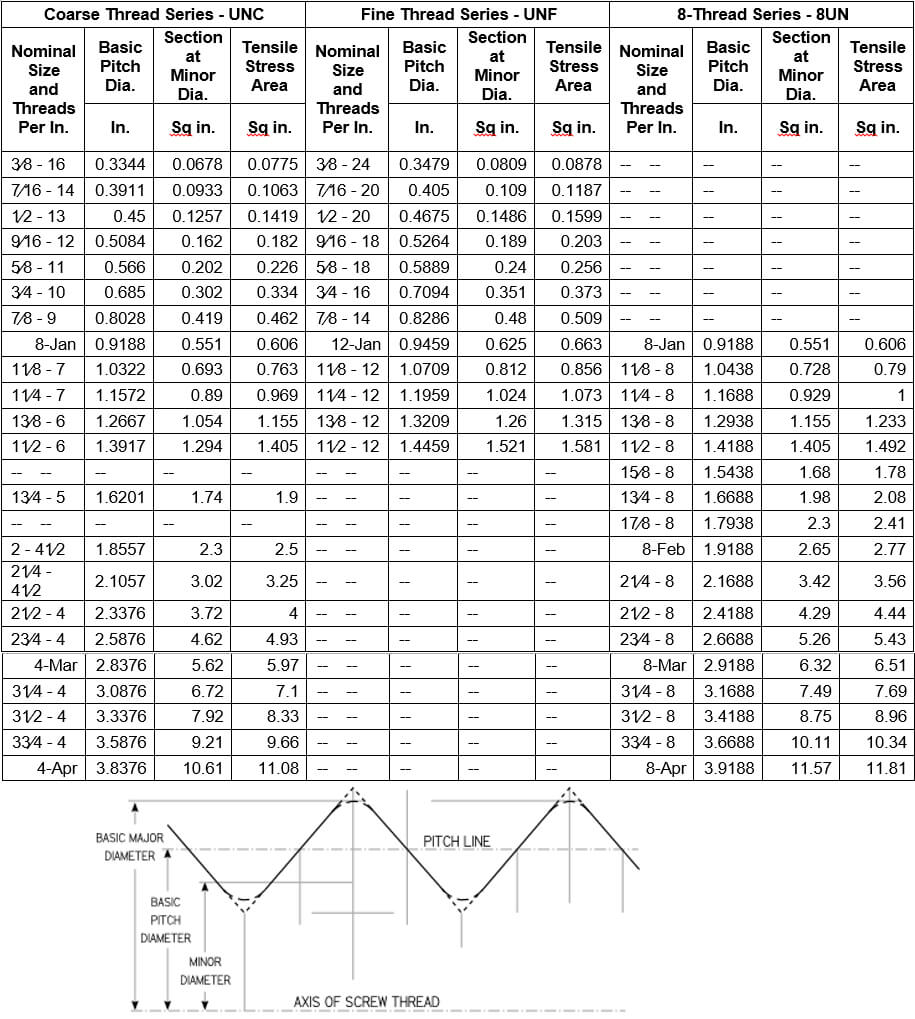
Primero comencemos con la nomenclatura que podemos encontrar con las cuerdas estandar
Ahora vamos a visualizar como podemos determinar sus medidas y cuales son las variables que tenemos que tener en cuenta para su diseño
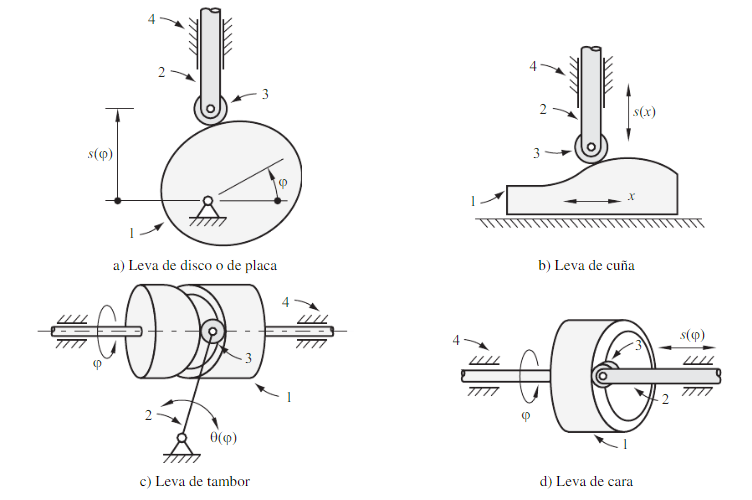
Leva: Es un mecanismo que genera movimiento deseado en un seguidor por medio de contacto directo. Por lo general las Levas van montados en ejes (arboles) rotatorios aunque pueden ser empleadas inmóviles y el seguidor sea el que se mueve el rededor de ellas. Cambien pueden producir movimiento oscilatorio o pueden convertir movimientos de diferentes maneras
La forma de la leva es determinada por el movimiento del seguidor. En la ingeniería las Levas tienen muchos beneficios al emplearse a diferencia de los mecanismos articulados de cuatro barras de cinemática
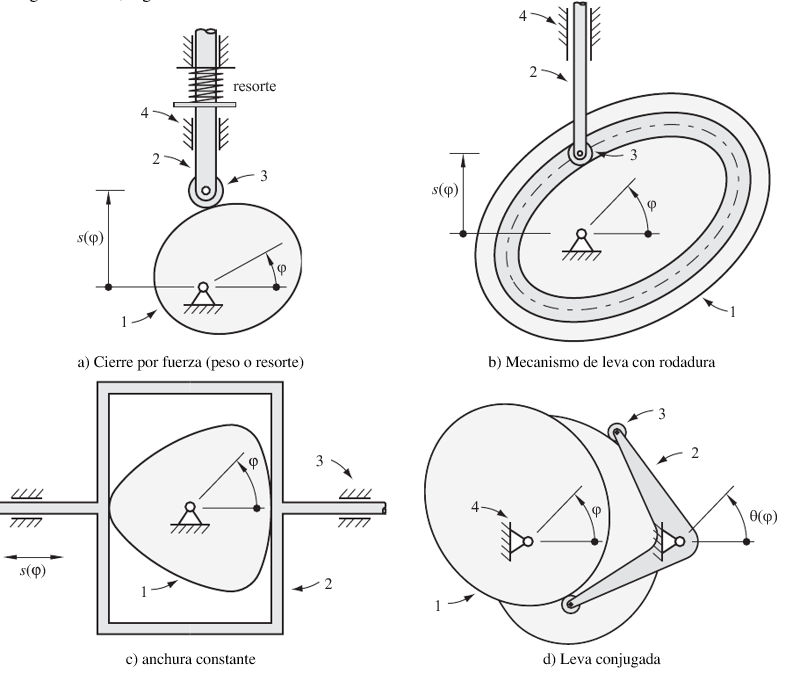
Comencemos por ver los tipos de seguidores:
Gráficas de movimiento de levas
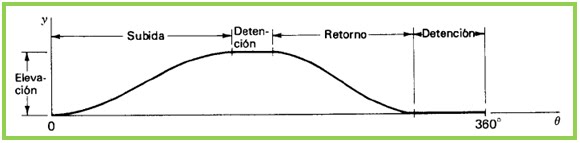
DIAGRAMA DE DESPLAZAMIENTO El diagrama de desplazamiento «y = f (θ)» representa, en el caso más general, la posición del seguidor respecto de la posición de la leva. Por ejemplo en una leva de placa con seguidor de movimiento rectilíneo alternativo, representaría la posición del seguidor respecto del ángulo girado por la leva, pero en otros casos, tanto «y» como «θ», pueden ser desplazamientos lineales o angulares.
Diagrama de desplazamiento.
Un movimiento muy típico a conseguir por medio de un mecanismo de leva es el movimiento uniforme en el cual la velocidad del seguidor será constante siempre que sea constante la velocidad de la leva, (quizás sería mejor llamarlo movimiento proporcional). Este tipo de movimiento queda reflejado en el diagrama de desplazamiento por medio de un segmento rectilíneo.
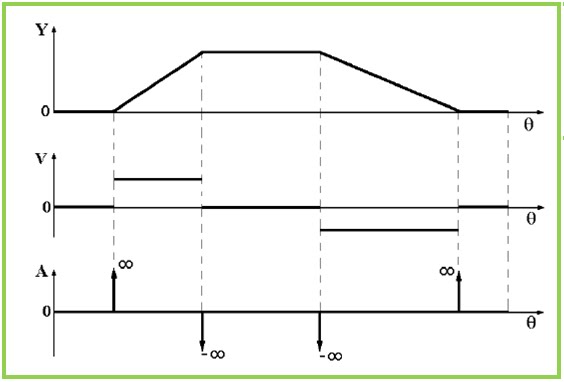
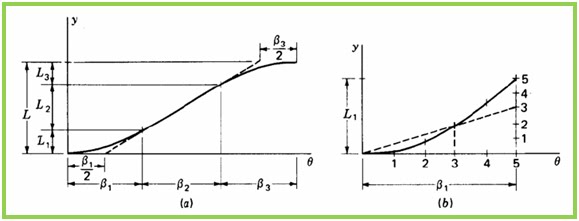
Desplazamientos, velocidades y aceleraciones del seguidor Si se tuviese una leva con la que se pretende, por ejemplo, realizar: una subida con movimiento uniforme, una detención y finalmente un retorno, y no se tomase ningún tipo de precaución resultaría que podrían aparecer aceleraciones del seguidor tendiendo a infinito, tal como se ve en la figura Si la aceleración del seguidor tiende a infinito, también lo harán las fuerzas de inercia, con lo que llegarían a romperse las piezas que componen la leva. Como esto es inadmisible, se debe prever un diagrama de desplazamiento que no produzca discontinuidades en el diagrama de velocidades. Para suavizar el inicio o final de un movimiento uniforme se suele utilizar una rama de parábola, consiguiendo que las pendientes de los tramos de parábola coincidan con la pendiente del movimiento uniforme.
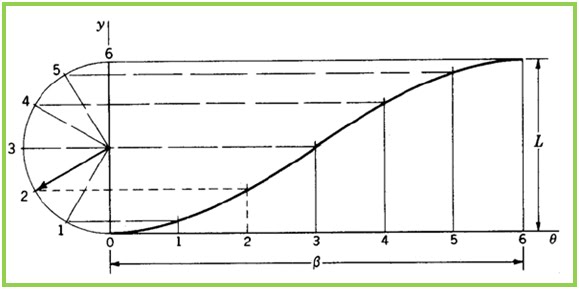
Tramos de parábola. a) Unión de movimiento uniforme y b) dibujo del tramo. Cuando se desea realizar un desplazamiento del seguidor de subida y bajada sin detenciones, un movimiento muy adecuado es el armónico. ya que este tipo de movimiento tiene velocidades y aceleraciones que son funciones continuas.
Diagrama de desplazamiento con movimiento armónico
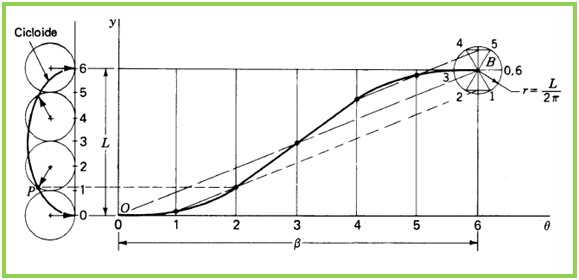
Si se desea que el seguidor realice unos desplazamientos de subida y bajada entre detenciones, un movimiento adecuado es el cicloidal, puesto que este movimiento tiene aceleraciones nulas al inicio y al final, correspondiéndose con las aceleraciones nulas de las detenciones.
Diagrama de desplazamiento con movimiento cicloidal
Para aprender más del tema te dejamos material de descarga
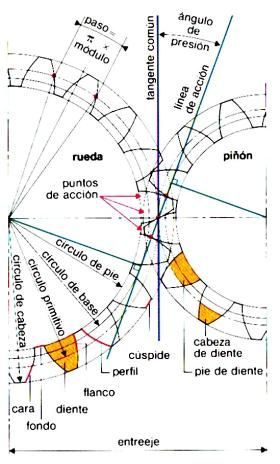
La función de un engrane radica en la transmisión de movimiento ya sea rotatorio o reciprocante de una maquinaria a otra y donde requiere reducir o aumentar las revoluciones de un eje
Los engranes se caracterizan por ser cilíndricos o conos rodantes que poseen dientes en la superficie de contacto para que se genere un movimiento positivo
Los engranes son los mas eficaces debido a su durabilidad y resistencia de todos los transmisores mecánicos. Es por eso que se utilizan engranes en lugar de bandas o cadenas en transmisiones automotrices a excepción de la transmisión CVT que se acciona por una correa o como las bicicletas