La válvula de control de suministro de combustible, está diseñada para controlar la cantidad de combustible diesel que fluye desde la bomba de baja presión o de elevación a los pistones de la bomba de alta presión.
el suministro de mayores cantidades de combustible permitidas a los pistones de la bomba de alta presión dan como resultado una mayor presión generada y, por lo tanto, una mayor presión en el riel común.
En cuestión de Cantidades más pequeñas de combustible permitidas a los pistones de la bomba de alta presión dan como resultado una menor presión generada y, por lo tanto, crean una menor presión en el riel común.
Controlar la cantidad de combustible suministrada a los pistones de la bomba de alta presión da como resultado una temperatura de combustible más baja y reduce la carga en la bomba de alta presión. El exceso de combustible regresa al tanque de combustible.
Funcionamiento
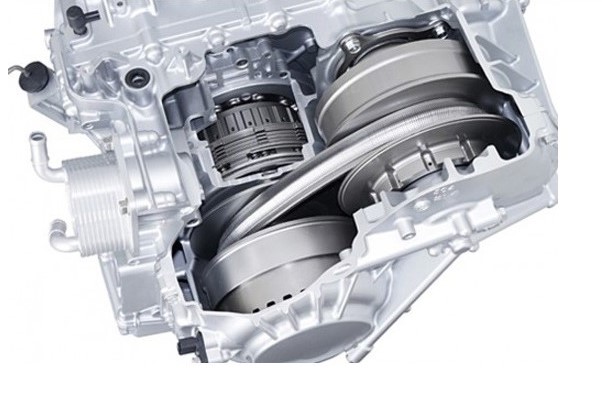
La bomba de alta presión se acciona a la mitad de la velocidad del motor y se acopla al motor a través de un mecanismo de transmisión por correa o engranaje.
Presurizar el combustible y devolver una gran parte del mismo al tanque impacta negativamente en la potencia de salida del motor y el ahorro de combustible.
Para minimizar la pérdida parasitaria, es decir, la pérdida de potencia para operar los componentes, las bombas más nuevas tienen capacidades de medición de entrada para aumentar la potencia de salida del motor y la economía de combustible.
Por ejemplo, Bosch proporciona la capacidad de uno de los elementos de bombeo para apagarse eléctricamente. Un solenoide conectado a un pasador en una válvula de entrada puede mantener abierta la válvula de retención de entrada, lo que no produce compresión de combustible durante el funcionamiento de la bomba.
El sistema Delphi Multec CR utiliza una válvula dosificadora de entrada en la bomba que proporciona una coincidencia más cercana a la cantidad de combustible presurizado en el riel común a la cantidad requerida por los inyectores.
La retroalimentación de circuito cerrado del sensor de presión del riel controla una válvula de control de presión electrohidráulica ubicada en la válvula de entrada de las bombas. Se gasta menos energía cuando se requieren presiones de inyección más bajas y cantidades mínimas de combustible pasan a través de la bomba, lo que conduce a mayores ganancias de ahorro de combustible.
Beneficio
En la reduccion de la cantidad de combustible presurizado por la bomba es que elimina el calentamiento innecesario del combustible durante la presurización. Delphi informa que su sistema mejora la economía de combustible hasta en un 3% y elimina la necesidad de costosos enfriadores de combustible.
Para de reducir la cantidad de combustible presurizado por la bomba es que elimina el calentamiento innecesario del combustible durante la presurización. Delphi informa que su sistema mejora la economía de combustible hasta en un 3% y elimina la necesidad de costosos enfriadores de combustible.
Otro beneficio de reducir la cantidad de combustible presurizado por la bomba es que elimina el calentamiento innecesario del combustible durante la presurización. Delphi informa que su sistema mejora la economía de combustible hasta en un 3% y elimina la necesidad de costosos enfriadores de combustible.
En los vehículos con sistema de inyección diésel en la mayoría de sus sistemas Common Rail incluye una válvula de control de presión de combustible . Esto puede ubicarse en la bomba de alta presión o en el riel común. La válvula de regulación de presión sirve con la válvula de control de cantidad para controlar la presión del riel común.
La válvula de alivio de presión simplemente permite que fluya más o menos combustible a alta presión hacia el sistema de fuga trasera, lo que aumenta o disminuye la presión de combustible en el riel. El exceso de combustible regresa al tanque de combustible. Está controlado desde el ECM.
Funcionamiento
La válvula de control de presión utiliza una señal eléctrica PWM para regular la presión de combustible en el riel de combustible. Existe un circuito de retroalimentación de circuito cerrado entre el sensor de presión del riel y el regulador de la bomba de combustible. Una señal modulada de ancho de pulso de corriente continua aplicada al regulador de presión determina la cantidad de combustible que se suministra a la bomba, devuelta al tanque o a la entrada de la bomba según la señal del sensor de presión del riel. La válvula de control de presión de combustible funciona en un ciclo de trabajo de entre 5 y 95%.
El mayor porcentaje de ciclo de trabajo corresponde a una menor presión de la bomba. Esto significa que si el regulador de presión pierde su señal, funcionará a un valor abierto o predeterminado y el motor continuará funcionando aunque funcione de manera aproximada. El valor óptimo para la presión de inyección es coordinado por el ECM de acuerdo con la velocidad del motor y las condiciones de carga. Con algunos sistemas de gestión del motor, el regulador de presión actúa como un sensor de temperatura del combustible.
La resistencia de la bobina dentro del regulador es proporcional a la temperatura del combustible y permite inferir la temperatura del combustible a partir de la resistencia de los actuadores. Se utilizan dos reguladores de presión del riel de combustible en el DMAX 2010. El primero permanece ubicado en la bomba de inyección.
Un segundo regulador está ubicado en la parte delantera del riel de combustible izquierdo y tiene un solenoide normalmente abierto. Se aplica un ancho de pulso modulado a este regulador para controlar la cantidad de combustible devuelto al tanque de combustible. Se utilizan dos reguladores para los monitores del sistema de combustible OBD-II. El exceso de flujo de retorno de los inyectores indica un problema con válvulas de boquilla desgastadas o actuadores defectuosos.
El BSI (Body System Interface) O caja de servicio inteligente es un módulo calculador central de la arquitectura eléctrica del automóvil de grupo PSA (Peugeot y Citroen principalmente) que incluye una parte potencia como fusibles y relevadores, y una unidad de distribución de energía, que permiten la distribución de energía y la transferencia de datos entre el y los demás módulos haciendo la función de un BCM,
Con sus propios microprocesadores «integrados», es capaz de manejar datos y distribución de energía a velocidad, su diseño «inteligente» también tiene la capacidad dar prioridad a los sistemas de seguridad si es necesario.
El módulo y/o fusilera inteligente reúne la mayoría de las funciones de control eléctrico y control de la carrocería del vehículo implementadas hasta ahora en cajas individuales.
El BSI controla las alimentaciones eléctricas VAN y sirve de intermediario entre la red CAN, VAN confort y VAN carrocería
BSI consta de los siguientes elementos eléctricos y mecánicos:
Un circuito impreso electrónico (A) que integra, entre otros, el microprocesador, el control electrónico y las etapas de control de baja potencia necesarias para que el sistema funcione.
Un circuito de alimentación impreso (B) que integra los relés de alimentación y los fusibles de protección ubicados frente al B.S.I.
NOTA: Solo los fusibles (C) ubicados en la caja son accesibles.
¿Qué controla el BSI?
LUCES DE EMERGENCIA
INDICADORES DE DIRECCIÓN
DETECCIÓN DE LÁMPARA QUEMADA
LIMPIADOR DE VENTANAS DELANTERO SIN SENSOR DE LLUVIA
LIMPIADOR DE VENTANA TRASERA
GESTIÓN DEL INTERRUPTOR DE LÍMITE DE VENTANA
LIMPIADOR DE VENTANAS REDUCTOR DE MOTOR ANTIBLOQUEO
VENTANAS DELANTERAS / TRASERAS
FUNCIÓN ANTI-ARRANQUE DEL VEHÍCULO
FUNCIÓN DE SEÑAL DE SONIDO OLVIDACIÓN MÍNIMA
SONIDO SENAL OLVIDANDO LA LLAVE DE ENCENDIDO
CIERRE CENTRALIZADO Y FUNCIÓN DE CONTROL REMOTO DE HF
BLOQUEO / DESBLOQUEO MANUAL
BLOQUEO / DESBLOQUEO POR CONTROL REMOTO HF
VISIÓN POR EL FLASHER
CONTROL REMOTO DE ALTA FRECUENCIA
VISTA DE BATERÍA DESCARGADA:
RESINCRONIZACIÓN DEL ENVIADOR-RECEPTOR:
FUNCIÓN DE TIEMPO ILUMINACIÓN LUCES DE TECHO
LUMINACIÓN DE TECHO PROGRESIVA
EXTENSIÓN DE LUZ DE TECHO PROGRESIVA
FLASH DE LUZ DE TECHO (FUNCIÓN DE ALERTA VISUAL DE PUERTA ABIERTA)
IPDM (Intelligent Power Distribution Module) es un acrónimo de Nissan / Infiniti. El IPDM E / R ( módulo de distribución inteligente de energía) integra la caja de relés y el bloque de fusibles que se encuentra ubicado en el compartimiento del motor.
Controla relés integrados a través del circuito de control IPDM E / R. El circuito de control integrado IPDM E / R realiza la operación ON-OFF de relés, control de comunicación CAN, recepción de señal del interruptor de presión de aceite, etc., también controla la operación de cada componente eléctrico a través de líneas de comunicación BCM y CAN.
Sistema que se encarga de distribuir la corriente en los componentes de la carrocería. Componentes que controla el IPDM:
Faros
Limpiaparabrisas
Desempeñador trasero
Control del compresor de aire acondicionado Mejor control de la temperatura del motor: Con este sistema se ha eliminado la válvula EGR y se logra reducir los Nox.
Power control System
CONTROL DE VENTILADOR DE REFRIGERACIÓN IPDM E / R emite la señal de servicio de pulso (señal PWM) al módulo de control del ventilador de enfriamiento de acuerdo con el estado de la señal de solicitud de velocidad del ventilador de enfriamiento recibida del ECM a través de la comunicación CAN
CONTROL DE ALTERNADOR IPDM E / R emite la señal de comando de generación de energía (señal PWM) al alternador de acuerdo con el estado de la señal de valor de comando de generación de energía recibida del ECM a través de la comunicación CAN
Ubicación
Diagrama
Descripción del sistema
Ipdm e / r activa el circuito de control interno para realizar el control de encendido y apagado del relé de acuerdo con las señales de entrada de varios sensores y las señales de solicitud recibidas de las unidades de control a través de la comunicación de lata.
Para evitar daños en las piezas, los relés integrados ipdm e / r no se pueden quitar.
Sistema de control de consumo de energía
SISTEMA DE CONTROL DE CONSUMO DE ENERGÍA: Diagrama del sistema
SISTEMA DE CONTROL DE CONSUMO DE ENERGÍA: Descripción del sistema
contorno
Ipdm e / r incorpora una función de control de consumo de energía que reduce el consumo de energía de acuerdo con el estado del vehículo.
IPDM E / R cambia su estado (modo de control) con la señal de reposo y activación recibida de BCM a través de la comunicación CAN.
Modo normal (despertador)
La comunicación de la lata se realiza normalmente con otras unidades de control.
El control individual de la unidad por ipdm e / r se realiza normalmente.
Modo de bajo consumo de energía (suspensión)
El control de bajo consumo de energía está activo.
Se puede detener la transmisión.
Activación del modo de reposo
Ipdm e / r juzga que las condiciones de reposo se cumplen cuando el interruptor de encendido está apagado y ninguna de las siguientes condiciones está presente. Luego transmite una señal de listo para dormir (listo) a bcm a través de la comunicación de lata.
Salida de señales a actuadores
Interruptores o relés funcionando
Las solicitudes de salida se reciben de las unidades de control a través de la comunicación de lata.
Ipdm e / r detiene la comunicación de la lata y entra en el modo de bajo consumo de energía cuando recibe una señal de reposo (bipedestación) de bcm y se cumplen las condiciones de reposo.
Operación de despertador
Ipdm e / r cambia del modo de bajo consumo de energía al modo normal cuando recibe una señal de activación / desactivación de reposo (despertador) de bcm o se cumple alguna de las siguientes condiciones. Además, transmite una señal lista para dormir (no lista) a bcm a través de la comunicación de lata para informar el inicio de la comunicación de lata.
Interruptor de encendido
Se recibe una solicitud de salida de una unidad de control a través de la comunicación de lata.
Sistema de diagnóstico (ipdm e / r)
Descripción del diagnóstico
Prueba auto activa
Descripción
En la prueba automática activa, el ipdm e / r envía una señal de unidad a los siguientes sistemas para verificar su funcionamiento.
Limpiaparabrisas delantero (LO, HI)
Lámpara de estacionamiento
Lámpara de matrícula
Lámpara de cola
Luz antiniebla delantera (si está equipada)
Linterna frontal (lo, hola)
Compresor de aire acondicionado (embrague magnético) (si está equipado)
Ventilador
Procedimiento de operación
Nota:
Nunca realice una prueba automática activa en las siguientes condiciones.
La puerta del pasajero está abierta.
Consultar está conectado
Cierre el capó y levante los brazos del limpiaparabrisas del parabrisas. (Prevenir daños en el parabrisas debido al funcionamiento del limpiaparabrisas)
Nota:
Cuando se realiza una prueba automática activa con el capó abierto, rocíe agua sobre el parabrisas de antemano.
Apague el interruptor de encendido.
Encienda el interruptor de encendido y, dentro de 20 segundos, presione el interruptor de la puerta del conductor 10 veces. Luego apague el interruptor de encendido.
Encienda el interruptor de encendido en 10 segundos. Después de eso, la bocina suena una vez y comienza la prueba automática activa.
Después de que una serie de las siguientes operaciones se repite 3 veces, se completa la prueba automática activa.
Nota:
Cuando la prueba automática activa deba cancelarse a la mitad de la prueba, apague el interruptor de encendido.
Cuando la prueba automática activa no está activada, el interruptor de la puerta puede ser la causa. Verifique el interruptor de la puerta. Consulte dlk-255, «inspección de componentes».
Inspección en prueba auto activa
Cuando se activa la prueba automática activa, la siguiente secuencia de operación se repite 3 veces.
Concepto de prueba auto activa
Ipdm e / r inicia la prueba automática activa con las señales del interruptor de la puerta transmitidas por bcm a través de la comunicación de lata.Por lo tanto, la línea de comunicación de la lata entre ipdm e / r y bcm se considera normal si la prueba automática activa se inicia con éxito.
La prueba automática activa facilita la resolución de problemas si no se puede operar algún sistema controlado por ipdm e / r.
Cuadro de diagnóstico en prueba autoactiva
Función CONSULTAR (IPDM E / R)
Elemento de aplicación
Consult realiza las siguientes funciones a través de la comunicación con ipdm e / r.
Modo de diagnóstico directo
Descripción
Identificación ecu
Se muestra el número de pieza ipdm e / r
Resultado de autodiagnóstico
Se muestran los resultados del autodiagnóstico ipdm e / r.
Monitor de datos
Los datos de entrada / salida de IPDM E / R se muestran en tiempo real.
Prueba activa
El ipdm e / r activa las salidas para probar componentes.
CAN Diag Support Mntr
Se muestra el resultado del diagnóstico de transmisión / recepción de la comunicación CAN.
Pinout o pin-out es un término utilizado en electrónica para describir y conocer la posición e instalación del cableado eléctrico (pin) de un sensor, válvula, o sistema en un conector generalmente de Computadora de motor PCM/ECM , dicha posición esta determinado por un esquema o diagrama que muestra por números, colores y descripción la posición y en que conector va un sistema cableado
Un conector eléctrico generalmente consta de varios contactos eléctricos o pines que se pueden utilizar para transportar energía eléctrica o señales. Debido a la amplia variedad de aplicaciones y fabricantes, existe una amplia selección de conectores eléctricos con diferentes tipos y números de contactos o pines. El pinout de un conector identifica cada pin individual, que es fundamental al crear conjuntos de cables y adaptadores.
La identificación adecuada de pines y cables asegura que las señales y la potencia se transmitan a través de cables y conectores, es importante destacar que en el diagrama de PIN OUT es fundamental contar con el diagrama para determinar:
Señales de 12 V
Señales de 5 V
Tierras y masas
Lineas CAN Alta y Baja
Personalizado (Es cuando realizarás una prueba en un PIN especifico)
Los PIN OUT en el sector electrónico automotriz es de suma importancia ya que gracias a los diagramas que muestran la posición y la descripcion de cada PIN se pueden hacer ciertas pruebas de banco/ simulaciones y hasta programaciones los más PIN OUT más comunes y solicitados en el mercado de programación y reparacion automotriz son los siguietes
Los calibradores electrónicos de llantas (VIGIA) es un elemento comúnmente caracterizado por un varillaje en las llantas que monitorean y mantienen constante la presión de inflado especifica determinada por el fabricante del auto aun cuando esta sufra una pinchadura, el vigía se encarga de monitorear e indicarle al conductor mediante un pequeño display si hay alguna diferencia de presión o pinchadura en el neumático, esta alerta lo indica en un testigo luminoso y auditivo
Funcionamiento
Cuando se presenta el caso caso de que presente una disminución de la presión establecida previamente en uno o más de los neumáticos, generada por pinchada o cualquier motivo, el sistema genera una señal auditiva y lumínica que le advierte al conductor sobre un problema y también su ubicación para actuar en una conducción seguro y advertirle del problema para que esté contemple las reparaciones necesarias
Es en este mismo instante comienza el proceso de inflado, logrando la presión de calibrado en frío de forma permanente. En caso tal que la pérdida sea mayor como un neumático pinchado o explotado , el sistema no podrá compensar la entrega de aire y hará bajar la presión del compresor.
Un dispositivo electrónico de seguridad bloquea el equipo, anulando la entrega de aire a la llanta estallada. Al mismo tiempo una señal luminosa y auditiva advierte al conductor de la situación permitiendo que los demás sistemas que son accionados por aire como los frenos y suspensión funcionen de forma normal.
Componentes
El sistema calibrador electrónico de neumáticos está compuesto por diferentes elementos como panel, modulo, válvulas, tuercas de fijación, conjuntos de sujeción, filtros entre otros elementos que garantizan la presión de inflado de las llantas de forma permanente y que relacionamos en detalle a continuación.
Panel: Controla el funcionamiento del módulo de inflado e informa al conductor con señales audiolumínicas a través de una pantalla digital.
Módulo de Inflado: Está compuesto por electroválvulas y sensores electrónicos. Controla de forma permanente la presión de calibrado de los neumáticos y envía información al panel.
Rotor: Permite la conexión del circuito de aire a los neumáticos.
Válvulas de Inflado: Reemplazan a las válvulas originales de los neumáticos. En el sistema encontraremos de diversos tipos cortas, largas y tipo codo.
Acoples y Accesorios: Dentro de estas se encuentran los acoples de bajada, estándar, accesorios como el conjunto de bajada, tapones, tuercas, soportes, discos y tapas. Todos estos permiten las conexiones del circuito de aire.
Cómo Interpretar las Variaciones de Presión
Se deben calibrar los neumáticos en frio, a temperatura ambiente, teniendo en cuenta la tabla de cargas y presiones que suministra el fabricante de las llantas.
Es normal que los neumáticos aumenten su presión inicial en un 18%. Este porcentaje puede variar según la marca y modelo de la llanta, por tanto no se debe desinflar la llanta ante el aumento de la presión generada por el rodamiento.
El equipo tiene la particularidad de indicar la sobrepresión generada por rodamiento de los neumáticos, siempre y cuando se cumplan ciertascondiciones:
No debe de existir pérdidas ni del sistema ni de los neumáticos.
Debería de existir un equilibrio de presiones entre el sistema VIGIA y los neumáticos (que los neumáticos tengan la presión exacta que se indica en el panel).
Que las válvulas de inflado estén en perfecto estado de uso y funcionamiento.
Una valvula de alivio o Wastegate es un dispositivo integrado en un turbocompresor que controla la presión de sobrealimentación máxima permitida. La válvula de descarga es un componente en un turbocompresor que desvía los gases de la turbina. La función principal de la válvula de descarga es regular la presión de sobrealimentación óptima en los sistemas de turbocompresor para proteger el turbocompresor y el motor. El desvío de los gases de escape ajusta la velocidad de la turbina, que en sintonía ajusta la velocidad de rotación del compresor.
Es en esta etapa que la rueda de la turbina traduce la energía térmica (energía potencial) del escape del motor en energía mecánica. Si el flujo de escape se desvía de manera que no fluya a través de la rueda de la turbina de un turbocompresor, entonces su energía potencial no es convertida por la turbina. En pocas palabras, la reducción del flujo de escape a través de la turbina reduce y / o controla la presión de refuerzo. En una palabra,
Tipos de Válvulas de alivio
Hay dos tipos de alivios; interno y externo. Una compuerta de desechos interna está integrada en el conjunto de la carcasa de la turbina. Se instala una válvula de descarga externa en el tubo ascendente de escape entre el colector de escape y la entrada de la carcasa de la turbina. En cualquier caso, se requiere un actuador para operar la válvula de válvula de descarga. Cuando se abre la válvula, el flujo de escape se desvía de su trayectoria normal a través de la rueda de la turbina y, en su lugar, sale directamente al tubo de escape.
En función delmodo de apertura, se distinguen dos variantes de válvulas de descarga:
Válvula de descarga de tipo «push . En estas válvulas de descarga, la apertura es accionada mediante un muelle. Este muelle, tarado a una determinada fuerza, aprieta el pistón de la válvula manteniéndola cerrada. Cuando la presión en la admisión vence la fuerza del muelle, se abre la válvula para permitir la salida del aire comprimido.
Válvula de descarga de tipo «pull».En las válvulas de descarga de tipo jalar, la apertura es accionada por medio de una membrana en vez de por muelles. A diferencia de la versión tipo “push”, estas válvulas tienen la ventaja de que no necesitan regulación ya que se adaptan automáticamente a cualquier valor de presión. Se trata de un modelo más sofisticado y más caro que la opción tipo “push”, que permite un funcionamiento más optimizado y suave. Las válvulas de descarga tipo “pull” aseguran la estanqueidad máxima al ralentí y no sufren fugas bajo ningún rango de presión de soplado del turbo.
Válvula de descarga blow off
Como es la que expulsa el aire sobrante al exterior, . También suele llamarse válvula de descarga atmosférica, precisamente por lanzar al aire a presión a la atmósfera. Este tipo de válvulas es característica de los sonidos realizados al revolucionar el vehículo
Válvula de descarga de bypass
Una válvula de compresión bypass, también llamada válvula de recirculación, no saca el aire sobrante fuera. En su caso lo envía a la admisión, pero antes del turbo. Es decir, en la parte de donde el turbo saca el aire para luego presurizarlo y meterlo en el motor. Es importante que lo envíe a un lugar donde el caudalímetro pueda medir bien el aire que entra realmente. De lo contrario la mezcla de aire y combustible será incorrecta.
Control de la Válvula de Alivio Wastegate
Uno de los métodos más simples para controlar una válvula de descarga es mediante la presión del múltiple de admisión (presión absoluta del múltiple o MAP). Una línea o manguera conecta el colector de admisión a un actuador de válvula de descarga, que es esencialmente un diafragma mecánico y un dispositivo de resorte. El resorte dentro del actuador de la válvula de descarga mantiene la válvula en la posición cerrada. Al igual que la presión del colector de admisión (presión de refuerzo), también lo hace la presión en el actuador de la válvula de descarga, aplicando una fuerza al diafragma. Cuando la fuerza ejercida sobre el diafragma excede la fuerza del resorte, la válvula de descarga comienza a abrirse. A medida que cae la presión de refuerzo, el resorte cierra la compuerta de desechos.
Una implementación más moderna del control de la válvula de descarga es mediante un actuador eléctrico; Esto se está volviendo cada vez más popular en motores turboalimentados. En lugar de depender de una presión múltiple o una fuente de vacío, estas compuertas de desagüe cuentan con un solenoide eléctrico que es controlado directamente por el PCM y ajusta la posición de la válvula de compuerta de desagüe.
WASTEGATES Y TURBOCOMPRESORES DE GEOMETRÍA VARIABLE (VGT)
Tradicionalmente (con excepciones), un turbocompresor de geometría variable (VGT) no requiere el uso de una valvula de alivio, ya que el impulso se controla perpetuamente por la posición de los álabes en la carcasa de la turbina. El un VGT ajusta físicamente el tamaño efectivo de la carcasa de la turbina al aumentar o disminuir las presiones de los gases de escape que actúan sobre la rueda de la turbina. En lugar de desviar los gases de escape alrededor de la rueda de la turbina, un VGT simplemente abre las paletas, simulando un efecto similar al de una válvula de descarga.
A medida que se cierran las paletas, aumenta la energía de escape que actúa sobre la rueda de la turbina. Este rango de movimiento se utiliza para proporcionar una respuesta deseable del turbocompresor mientras se controlan las características de rendimiento y la presión de refuerzo máxima en todas las condiciones.
Un sensor de presión de refuerzo es parte de un motor turboalimentado que mide y regula la presión de aire en el colector de admisión y controla el nivel de impulso del motor sobrealimentado. Un BPS monitorea la velocidad y la presión del flujo de aire en el colector de admisión y asegura que el motor permanezca en su nivel óptimo y reciba el suministro ideal de aire y combustible.
Principio de funcionamiento del BPS
El sensor de presión de refuerzo mide la presión absoluta antes de la válvula de mariposa. La unidad de control del motor usa su señal para calcular un valor de corrección para la presión de refuerzo. Al detectar la cantidad de impulso y la densidad del aire en el colector de admisión del automóvil, la unidad de control electrónico o ECU del automóvil puede determinar cuánto combustible se necesita en la cámara de combustión del automóvil para que la mezcla de aire y combustible esté en su mejor momento. La mezcla adecuada de aire y combustible es fundamental para los motores, ya que esto se traduce en una producción de energía mejor y más eficiente. Esto no solo hace que el motor sea más potente, sino que también hace que el motor funcione de manera efectiva, maximizando cada gota de combustible.
Cuando la presión del múltiple es baja (alto vacío), la salida de voltaje del sensor es 0.25-1.8V en el ECM. Cuando la presión del múltiple de admisión es alta debido al turboalimentador, la salida de voltaje del sensor es 2.0-4.7V. El rango de presión está entre 10kPa y 350kPa. El sensor recibe una referencia de 5V del ECM. La tierra del sensor también es proporcionada por el ECM. El ECM utiliza la presión de refuerzo combinada con la temperatura del aire de admisión para determinar el volumen de aire que ingresa al motor.
Orden para verificar la funcionalidad del BPS
• Prueba de la tensión de alimentación.
Desconecte el enchufe del sensor.
Encienda el encendido.
Ajuste el multímetro a «voltaje de CC».
Mida el voltaje de alimentación entre el pin C (3) y la tierra A (1). Debe ser de aproximadamente 5V. Si no se alcanza este valor, debe localizarse la falla en el suministro de voltaje.
• Prueba de la señal de salida
Retire el sensor de presión del colector de admisión.
Conecte la bomba manual de vacío al sensor de presión.
Encienda el encendido.
Ajuste el multímetro a «voltaje de CC».
Establezca el valor de presión absoluta más bajo P-bajo.
Pruebe la señal de salida inferior U-baja entre el pin B (2) y la tierra A (1).
Establezca el valor de presión absoluta superior P-alto.
Pruebe la señal de salida superior U-high entre el pin B (2) y la tierra A (1).
• Verificación rápida del BPS usando un osciloscopio
Restaure todas las conexiones al BPS como durante el trabajo normal del motor.
Conecte el cable de tierra del osciloscopio a la tierra del chasis.
Conecte el cable de prueba del osciloscopio activo al terminal de señal del BPS (generalmente en el medio).
Arranque el motor y déjelo al ralentí.
Presione bruscamente el acelerador y luego suéltelo inmediatamente. Tenga en cuenta que el voltaje no se elevará a su máximo cuando el automóvil no esté funcionando. Esto es normal debido a la baja carga del motor.
Debe ver la señal de salida de CC que varía de 1.0V a 3.0V, que cambiará simultáneamente con la posición del acelerador.
En la figura 2 podrá monitorear el cambio de presión (eje y) en función del tiempo (eje x).
• Posibles fallas en el BPS: – Señal de salida caótica
La señal de salida caótica es, cuando la señal de voltaje cambia aleatoriamente, cae a cero y desaparece. Esto generalmente ocurre cuando hay un BPS ineficiente. En este caso, el sensor debe ser reemplazado.
– Falta de voltaje de señal
Compruebe si se aplica la tensión de alimentación (+ 5.0V).
Verifique la conexión a tierra para detectar problemas.
Si el voltaje de alimentación y la conexión a tierra son correctos, verifique el cable de señal entre el BPS y el controlador a bordo.
Si el voltaje de suministro y / o la conexión a tierra no son correctos, verifique la integridad de los cables entre el sensor y la ECU.
Si todos los cables del sensor son correctos, verifique todas las conexiones para el voltaje de referencia y tierra del controlador a bordo. Si son correctos bajo sospecha cae el controlador.
– La fuente de alimentación BPS o la señal es igual al voltaje de la batería del automóvil.
Compruebe si hay un cortocircuito a la p terminal de ositivo de la batería del coche.
• Otros controles:
Verifique si hay combustible excesivo en la manguera o trampa de vacío.
Revise la manguera de vacío por fugas y / u otros daños.
Verifique si hay partes mecánicas dañadas del motor, sistema de encendido o en el sistema de combustible, lo que provoca un bajo vacío.
Un sistema de encendido o de ignición es un sistema para encender una mezcla de aire y combustible. Los sistemas de encendido son bien conocidos en el campo de los motores de combustión interna, como los utilizados en los motores de gasolina (gasolina) que se utilizan para impulsar la mayoría de los vehículos de motor. El sistema de encendido se divide en dos circuitos eléctricos: el primario y el secundario. El circuito secundario consta de los devanados secundarios en la bobina, el cable de alta tensión entre el distribuidor y la bobina (comúnmente llamado el cable de la bobina) en los distribuidores externos de la bobina, la tapa del distribuidor, el rotor del distribuidor, los cables de las bujías y las bujías. .
Funcionamiento
La bobina es el corazón del sistema de encendido. Esencialmente, no es más que un transformador que toma 12 voltios de la batería y lo aumenta hasta un punto donde disparará la bujía hasta 40,000 voltios. El término «bobina» es quizás un nombre inapropiado ya que en realidad hay dos bobinas de alambre enrollado alrededor de un núcleo de hierro. Estas bobinas están aisladas entre sí y todo el conjunto está encerrado en una caja llena de aceite. La bobina primaria, que consiste en relativamente pocas vueltas de cable pesado, está conectada a los dos terminales primarios ubicados en la parte superior de la bobina. La bobina secundaria consta de muchas vueltas de alambre fino. Está conectado a la conexión de alta tensión en la parte superior de la bobina.
Tipos de encendido
Los tipos de bobinas con sus especificaciones vienen descritas en el capitulo uno de este articulo y lo puedes encontrar en Sistema primario de encendido
Sistema de encendido del distribuidor
Sistema de encendido directo (DI)
Tipo de bobina en bujía (COP): bobina individual para cada cilindro y el paquete de la bobina se monta directamente sobre las bujías.
Bobina individual para cada cilindro con cables HT (alta tensión) separados.
Encendido por chispa desechado: bobina separada para cada dos cilindros. Encendido sincrónico con dos terminales de bobina de devanado secundario.
Elementos del patrón de encendido secundario
Ángulo de estado cerrado de contactos
Este es el ángulo en el que el cigüeñal gira desde el comienzo de la acumulación de energía en el devanado primario de la bobina de encendido hasta que se produce la chispa en la bujía. En los sistemas de encendido con interruptor mecánico, estos son los grados en que se gira el cigüeñal desde el momento de cerrar los contactos del interruptor hasta que se vuelven a abrir. En los sistemas de encendido sin interruptor mecánico, este es el tiempo durante el cual la ECU permite que la corriente fluya a través del devanado primario de la bobina de encendido. El comienzo del flujo de corriente se determina a partir del interruptor electrónico potente de apertura y al final del flujo de corriente y, por lo tanto, la aparición de la chispa está determinada por el momento de la obstrucción del interruptor electrónico potente. El tiempo de permanencia es el tiempo que el circuito primario de la bobina se está completando y la corriente fluye a través de él. Las oscilaciones iniciales en el patrón son el resultado de la acumulación inicial del campo magnético que se crea alrededor de cualquier conductor con paso de corriente. A medida que el campo magnético aumenta su fuerza, provoca una «Fuerza contraelectromotriz» que se opone al flujo de corriente. Es por eso que el patrón comienza a tomar una ligera pendiente ascendente
Ángulo de avance
Este es el ángulo en el que el cigüeñal gira en el momento en que surge la chispa hasta llegar al cilindro correspondiente en el punto muerto superior. Una de las tareas principales de cualquier sistema de encendido es garantizar un ángulo de avance óptimo en caso de chispa. Para garantizar la máxima potencia, la mezcla debe encenderse antes del pistón, que está en ciclo de bombeo para alcanzar su punto muerto superior, por lo que después de alcanzar los gases muertos superiores puede tener una presión máxima y un trabajo útil máximo realizado durante la carrera de trabajo del pistón. Además, cualquier sistema de encendido proporciona interrelación entre el ángulo de avance de la chispa, la velocidad del motor y la carga del motor. Cuando un aumento de chispa en un momento que no corresponde al ángulo de avance óptimo deteriora el rendimiento del motor y aumenta el consumo de combustible. A velocidades más altas, la velocidad de movimiento de los pistones aumenta en este momento para quemar la mezcla no cambia, por lo que la chispa debe ocurrir antes. Por lo tanto, el avance debe aumentarse. A la misma velocidad del cigüeñal, la posición del acelerador (acelerador) puede variar. Esto significa que el cilindro formará una mezcla de composición diferente y la velocidad de combustión de la mezcla depende de su composición. Con el acelerador completamente abierto (pedal del acelerador totalmente presionado), la mezcla se quema más rápido y debe encenderse más tarde; por lo tanto, cuando se aumenta la carga del motor, debe reducir el avance. Por el contrario, cuando el acelerador no está bien cerrado, la velocidad de combustión de la mezcla de trabajo es menor, por lo que debe aumentar el avance .
Tensión de perforación
Este es el valor del voltaje en el circuito secundario en el momento de la aparición de la chispa. De hecho, este es el voltaje máximo en el circuito secundario. Depende directamente de la distancia entre los electrodos de las bujías y la mezcla en los cilindros. Una chispa en ese momento, que interrumpe el flujo de corriente a través del devanado primario de la bobina de encendido. El valor típico de esta tensión es entre 7 kV y 12 kV.
Tensión de combustión de la mezcla – «chispa Kv»
El punto cuando la chispa real a través del espacio comienza a tener lugar. Esta parte del patrón se llama «chispa KV», o la energía requerida para iniciar realmente la chispa y mantenerla en funcionamiento. La chispa KV se ve afectada por la resistencia real del circuito secundario, desde el cable de encendido, a través del enchufe, a través del espacio a tierra. Una chispa alta Kv significa una resistencia superior a la normal y una chispa inferior Kv significa una resistencia inferior a la normal. Las tensiones en el circuito secundario de ignición durante la combustión de la chispa generalmente están entre 1 kV-2 kV.
Tiempo de grabación: línea de chispa (también llamada «duración de la chispa»)
La longitud de la combustión de chispas es normalmente entre 1.5 mS a 2 mS. La «línea de chispa» es el tiempo real en que la chispa se mueve a través del espacio de la bujía. Normalmente, esto debería estar entre 1.5 mS a 2.0 mS. Cualquier cosa por debajo de 0,8 mS generalmente significa que se ha producido un fallo de encendido. Se ve afectada por la resistencia del circuito, al igual que la chispa KV, pero lo bueno de la línea de quemado es que es una ventana al proceso de combustión.
Forma de onda de ignición secundaria
Procedimiento para verificar la confiabilidad del circuito de encendido secundario
– Mediciones de ohmímetro y voltímetro –
Mida la resistencia del devanado secundario de la bobina con un ohmímetro. La resistencia normal debe ser de alrededor de 7000Ω.
Encienda el encendido pero no arranque el motor.
Use un voltímetro para verificar si el voltaje de la batería se aplica al terminal positivo de la bobina (generalmente «2») y a la tierra del chasis.
Un sistema de encendido o de ignición es un sistema para encender una mezcla de aire y combustible. Los sistemas de encendido son bien conocidos en el campo de los motores de combustión interna, como los utilizados en los motores de gasolina (gasolina) que se utilizan para impulsar la mayoría de los vehículos de motor. El sistema de encendido se divide en dos circuitos eléctricos: el primario y el secundario. El circuito primario lleva bajo voltaje. Este circuito funciona solo con corriente de batería y está controlado por los puntos de interrupción y el interruptor de encendido.
Funcionamiento
La bobina es el corazón del sistema de encendido. Esencialmente, no es más que un transformador que toma 12 voltios de la batería y lo aumenta hasta un punto donde disparará la bujía hasta 40,000 voltios. La bobina del sistema primario, consiste en relativamente pocas vueltas de cable pesado, está conectada a los dos terminales primarios ubicados en la parte superior de la bobina. La bobina secundaria consta de muchas vueltas de alambre fino. Está conectado a la conexión de alta tensión en la parte superior de la bobina (la torre en la que está enchufado el cable de la bobina del distribuidor).
Tipos de encendido
Sistema de encendido del distribuidor
Sistema de encendido directo
Tipo de bobina en bujía (COP): bobina individual para cada cilindro y el paquete de la bobina se monta directamente sobre las bujías.
Bobina individual para cada cilindro con cables HT (alta tensión) separados.
Encendido por chispa desechado: bobina separada para cada dos cilindros. Encendido sincrónico con dos terminales de bobina de devanado secundario.
Encendido por distribuidor
El sistema de encendido del distribuidor es el sistema de encendido más común para los vehículos de principios de año. Los sistemas de encendido del distribuidor usan una bobina que dispara una bujía a la vez solo en la carrera de compresión. Ver el patrón de encendido primario requiere que tenga que monitorear la señal de voltaje en el lado negativo del circuito primario de la bobina e identificar el cilindro de disparo utilizando la sonda RPM.
El sistema de encendido convencional consta de los siguientes componentes:
Bobina de encendido
Distribuidor
Bujías
Cables de alta tensión
Algunos medios para controlar el circuito de encendido primario.
El circuito primario de la bobina de encendido puede contener: puntos, puntos que controlan un transistor, el transistor está controlado por algún otro medio (sin interruptor) o encendido electrónico. En los sistemas de encendido de tipo punto, la corriente en el circuito primario se controla mediante un interruptor mecánico (o disyuntor). Los puntos mecánicos pueden controlar un transistor de conmutación que abre y cierra el circuito primario de la bobina de encendido. En el interruptor sin transistor y encendido electrónico, se puede usar un efecto Hall, VRS (Sensor de reluctancia variable) o un sensor óptico para controlar el transistor de conmutación.
La corriente fluye desde el terminal positivo de la batería, a través del interruptor de encendido y / o relé, a través de un fusible y hasta la terminal positiva de la bobina de encendido. La corriente regresa a la batería a través del terminal negativo de la bobina de encendido, a través del dispositivo de conmutación (puntos o un transistor) a través del chasis del vehículo y al terminal negativo de la batería. Mientras la corriente fluye en el circuito primario, se acumula un campo magnético en la bobina de encendido. Debido a la inductancia de la bobina de encendido, la corriente primaria tarda un tiempo (1-6 mS, según el diseño) en alcanzar su valor nominal. Cuando se interrumpe el flujo de corriente primario, el campo magnético se colapsa rápidamente (en aproximadamente 20 µS) y se induce un alto voltaje en el devanado primario (Fuerza contraelectromotores CEMF). Este voltaje se transforma en un voltaje muy alto en el devanado secundario. La amplitud de este voltaje depende de la relación de espiras (comúnmente 100: 1). Un voltaje primario de 300 V, por lo tanto, será de 30 000 V en el devanado secundario. El voltaje solo aumentará hasta que se alcance el voltaje de ruptura del entrehierro: el voltaje de encendido de la bujía.
Sistema de encendido directo
Los sistemas COP utilizan una bobina individual para cada bujía. Cada bobina se encuentra directamente encima de su bujía y no utiliza cables de bujía externos. Cada paquete de bobinas también tiene un circuito primario independiente que debe probarse individualmente. La bobina de encendido individual por un ciclo de funcionamiento del motor genera una chispa de encendido. Por lo tanto, en los sistemas de encendido individuales se requiere la sincronización del trabajo de las bobinas con la posición del árbol de levas.
Al presentar el voltaje a la bobina primaria, la corriente comienza a fluir por una bobina primaria y, debido a eso, en el núcleo de la bobina cambia el valor del flujo magnético. El cambio del valor del flujo magnético en el núcleo de la bobina conduce a la aparición del voltaje de polaridad positiva en una bobina secundaria. Debido a que la velocidad de aumento de la corriente en la bobina primaria es lenta, el voltaje que surge en una bobina secundaria es pequeño, de acuerdo con 1 … 2 kV. Pero en ciertas condiciones, el valor del voltaje puede ser suficiente para la aparición prematura de la chispa entre los electrodos de una bujía y, como consecuencia, el encendido prematuro de la mezcla de aire / combustible. Para evitar posibles daños del motor debido a la aparición prematura de la chispa, Se debe excluir la formación de la chispa entre los electrodos de una bujía al someter un voltaje a una bobina primaria.
En el momento del cierre de la cascada de ignición de salida, la corriente en el circuito primario se interrumpe bruscamente y el flujo magnético disminuye rápidamente. Este cambio rápido del valor del flujo magnético hace que ocurra el alto voltaje en una bobina secundaria de la bobina de encendido (bajo ciertas condiciones, el voltaje en una bobina secundaria de la bobina de encendido puede alcanzar 40… 50 kV). Cuando este voltaje alcanza el valor que proporciona la formación de la chispa entre los electrodos de una bujía, la mezcla de aire / combustible comprimido en el cilindro se enciende desde la chispa entre los electrodos de una bujía.
En algunos sistemas, las bobinas no se encuentran directamente encima de cada bujía y se utilizan cables HT externos para bujías. Cada paquete de bobinas también tiene un circuito primario independiente que debe probarse individualmente.
Encendido por módulo DIS
Los sistemas de encendido DIS utilizan una bobina por cada dos cilindros, también llamados sistemas de «chispa de desperdicio». Un sistema de chispa residual dispara una bobina por cada par de cilindros que se encuentran en el punto muerto superior (TDC) al mismo tiempo. Estos pares de cilindros se denominan «compañeros de carrera». Un cilindro está en TDC en la carrera de compresión, mientras que el otro está en TDC en la carrera de escape. La chispa en el cilindro en TDC en la carrera de compresión enciende la mezcla de aire y combustible para producir energía. La chispa en el cilindro en TDC en la carrera de escape está «desperdiciada», de ahí el nombre de «chispa residual». Cada bobina DIS de chispa residual se engancha en serie con sus dos bujías. Cuando se dispara la bobina, la corriente secundaria crea una chispa de alto voltaje a través de los espacios de ambos enchufes.
Un enchufe se dispara con la polaridad directa tradicional de un sistema de encendido: negativo (-) a positivo (+) El otro enchufe se dispara con polaridad opuesta: positivo (+) a negativo (-) Por lo tanto, un enchufe siempre se dispara con lo que siempre se ha llamado «polaridad invertida». Sin embargo, la capacidad de voltaje de una bobina DIS es lo suficientemente alta como para garantizar que el voltaje disponible siempre sea lo suficientemente alto como para disparar el enchufe con polaridad invertida cuando está en la carrera de compresión.
Forma de onda de ignición primaria
1. El interruptor interno de la ECU se cierra. La corriente se precipita en la bobina y comienza a acumularse, por lo que el voltaje cae cerca del suelo y esencialmente permanece allí hasta la chispa de encendido. 2. La bobina ahora está saturada de electricidad, como lo indica el salto de voltaje. La bobina ya no se carga gracias a la ECU. 3. El interruptor de la ECU se abre, liberando toda la corriente acumulada. Los amplificadores caen como una roca y el voltaje se dispara. 4. La línea de chispa indica la duración del evento de chispa en el enchufe. 5. Cuando no queda suficiente energía para la chispa, la energía restante se desconecta y el evento comienza de nuevo.
Procedimiento para verificar la funcionalidad del circuito de encendido primario
– Mediciones de ohmímetro y voltímetro del devanado primario de la bobina de encendido –
Mida la resistencia del devanado primario de la bobina con un ohmímetro. La resistencia normal debe ser inferior a 1Ω.
Encienda el encendido pero no arranque el motor.
Use un voltímetro para verificar si el voltaje de la batería se aplica al terminal positivo de la bobina (generalmente «2») y a la tierra del chasis.
Descripción general El bus CAN (Controller Area Network) por sus siglas en ingles, es un bus automotriz desarrollado por Bosch, que permite que los microcontroladores y dispositivos se comuniquen entre sí dentro de un vehículo sin una computadora host. El bus CAN es un protocolo basado en mensajes, diseñado específicamente para aplicaciones automotrices, pero ahora también se usa en otras áreas como aeroespacial, automatización industrial y equipos médicos.
Conecta los sistemas y sensores individuales como una alternativa a los telares de cables múltiples convencionales. Permite que los componentes automotrices se comuniquen en un bus de datos en red de uno o dos cables de hasta 1 Mbps. El bus CAN es uno de los cinco protocolos utilizados en el estándar de diagnóstico del vehículo OBD-II.
Funcionamiento
El bus CAN utiliza dos cables dedicados para la comunicación. Los cables se llaman CAN alto y CAN bajo. El controlador CAN está conectado a todos los componentes de la red a través de estos dos cables. Cada nodo de red tiene un identificador único. Todas las ECU en el bus están efectivamente en paralelo y es por eso que todos los nodos ven todos los datos, todo el tiempo. Un nodo solo responde cuando detecta su propio identificador. Los nodos individuales se pueden eliminar de la red sin afectar a los otros nodos.
Cuando el bus CAN está en modo inactivo, ambas líneas transportan 2.5V. Cuando se transmiten bits de datos, la línea alta CAN pasa a 3.75V y la baja CAN baja a 1.25V, generando un diferencial de 2.5V entre las líneas: cada una de las líneas CAN está referenciada a la otra, no a la tierra del vehículo . Dado que la comunicación se basa en un diferencial de voltaje entre las dos líneas de bus, el bus CAN NO es sensible a picos inductivos, campos eléctricos u otros ruidos. Esto hace que el bus CAN sea una opción confiable para comunicaciones en red en equipos móviles.
La alimentación CAN se puede suministrar a través del bus CAN. O una fuente de alimentación para los módulos de bus CAN se puede organizar por separado. El cableado de la fuente de alimentación puede estar totalmente separado de las líneas del bus CAN, lo que da como resultado que se utilicen dos cables de 2 hilos para la red, o puede integrarse en el mismo cable que las líneas del bus CAN, lo que da como resultado un solo cable de 4 hilos.
La naturaleza de las comunicaciones del bus CAN permite que todos los módulos transmitan y reciban datos en el bus. Cualquier módulo puede transmitir datos, que recibe el resto de los módulos. Es muy importante que el ancho de banda del bus CAN se asigne primero a los sistemas más críticos para la seguridad. Los nodos generalmente se asignan a uno de varios niveles de prioridad. Por ejemplo, los controles del motor, los frenos y las bolsas de aire son muy importantes desde el punto de vista de la seguridad, y los comandos para activar estos sistemas tienen la máxima prioridad. Esto significa que se actuarán antes que los menos críticos. Los dispositivos de audio y navegación suelen ser de prioridad media, y la activación de la iluminación puede ser la prioridad más baja. Un proceso conocido como arbitraje decide la prioridad de cualquier mensaje.
La mayoría de las redes CAN de vehículos motorizados funcionan a una velocidad de bus de 250 kB / so 500 kB / s. Los últimos vehículos utilizan hasta 3 redes CAN separadas, generalmente de diferentes velocidades conectadas entre sí por puertas de enlace. Los datos en una de las tres redes están disponibles para las otras dos redes. Las funciones de gestión del motor generalmente se encuentran en un bus de alta velocidad a 500 kB / sy los sistemas de chasis funcionan en un bus CAN más lento de 250 kB / s. Otras funciones, como luces, satnav y espejos, se encuentran en un bus LIN (red de interconexión local) de baja velocidad y un solo cable.
Posibles problemas para fallas en la red CAN BUS :
• Los niveles de voltaje pico a pico no son correctos. • La señal no está presente en ambos cables CAN.
El estándar ISO 11898 enumera varios modos de falla del cable del bus CAN:
Descripción general Los inyectores Common Rail hacen posible un control electrónico fino sobre el tiempo y la cantidad de inyección de combustible, y la mayor presión que la tecnología common rail pone a disposición proporciona una mejor atomización del combustible. Para reducir el ruido del motor, la unidad de control electrónico del motor puede inyectar una pequeña cantidad de diesel justo antes del evento de inyección principal (inyección «piloto»), reduciendo así su explosion y vibración, así como optimizando el tiempo de inyección y la cantidad para variaciones en calidad del combustible, arranque en frío, etc. Algunos sistemas avanzados de combustible common rail realizan hasta cinco inyecciones por carrera.
Principio de funcionamiento del inyector electromagnético common rail.
La válvula solenoide TWV (válvula de dos vías) abre y cierra el orificio de salida para controlar tanto la presión en la cámara de control como el inicio y el final de la inyección. El principio de funcionamiento se muestra en la fig. 2)
Fase sin inyección
Cuando no se suministra corriente al solenoide, la fuerza del resorte es más fuerte que la presión hidráulica en la cámara de control. Por lo tanto, la válvula solenoide se empuja hacia abajo, cerrando efectivamente el orificio de salida. Por esta razón, la presión hidráulica que se aplica al pistón de comando hace que el resorte de la boquilla se comprima. Esto cierra la aguja de la boquilla y, como resultado, no se inyecta combustible.
Fase de inyección
Cuando la corriente se aplica inicialmente al solenoide, la fuerza de atracción del solenoide tira de la válvula solenoide hacia arriba, abriendo efectivamente el orificio de salida y permitiendo que el combustible fluya fuera de la cámara de control. Después de que el combustible fluye, la presión en la cámara de control disminuye, tirando del pistón de comando hacia arriba. Esto hace que la aguja de la boquilla se levante y que comience la inyección. El combustible que fluye más allá del orificio de salida fluye hacia el tubo de escape y debajo del pistón de comando. El combustible que fluye debajo del pistón levanta la aguja del pistón hacia arriba, lo que ayuda a mejorar la respuesta de apertura y cierre de la boquilla. La corriente de apertura es de 85V, 7A. La corriente de retención es de 12V, 2A.
Fin de la fase de inyección
Cuando se sigue aplicando corriente al solenoide, la boquilla alcanza su elevación máxima, donde la tasa de inyección también está en el nivel máximo. Cuando la corriente al solenoide se APAGA, la válvula solenoide cae y la aguja de la boquilla se cierra inmediatamente y la inyección se detiene.
• Comprobar resistencia
Asegúrese de que el encendido esté apagado y que el motor no arranque
Desconecte el conector del inyector de dos pines.
Conecte un ohmímetro preciso entre los terminales del conector del inyector. La resistencia debe estar entre 0.4 y 0.8 ohmios.
Descripción general Los inyectores Common Rail hacen posible un control electrónico fino sobre el tiempo y la cantidad de inyección de combustible, y la mayor presión que la tecnología common rail pone a disposición proporciona una mejor atomización del combustible. Para reducir el ruido del motor, la unidad de control electrónico del motor puede inyectar una pequeña cantidad de diesel justo antes del evento de inyección principal (inyección «piloto»), reduciendo así su explosividad y vibración, así como optimizando el tiempo de inyección y la cantidad para variaciones en calidad del combustible, arranque en frío, etc.
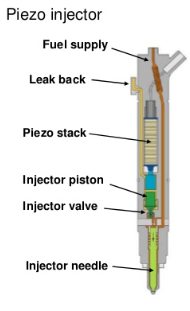
La tercera generación de Common Rail hace que los motores diesel sean aún más limpios, más económicos, más potentes y más silenciosos. La clave es el innovador sistema de inyección: funciona con un interruptor rápido, inyectores piezoinline compactos. Algunos sistemas avanzados de combustible common rail realizan hasta cinco inyecciones por carrera.
El funcionamiento de los inyectores piezoeléctricos es bastante similar al de los inyectores solenoides, con la diferencia de que tienen un núcleo cerámico. Esto se caracteriza por su capacidad de dilatarse o retraerse cuando recibe un pulso de corriente, el efecto piezoeléctrico. Sin embargo, para que los inyectores de este tipo sean factibles, los fabricantes tuvieron que sortear un cierto número de problemas. En primer lugar, la dilatación de un elemento piezoeléctrico es extremadamente baja. Para obtener un grado de desplazamiento utilizable, se requiere una pila de no menos de 400 discos de cerámica para formar el elemento activo del inyector. Para accionarlos, se les aplica un impulso de cien voltios y un pequeño brazo de palanca amplifica su movimiento. Además, como con los inyectores electromecánicos, los discos piezoeléctricos no controlan directamente los movimientos de la aguja. También activan una pequeña válvula.
La principal ventaja de los inyectores piezoeléctricos es su velocidad de operación y la repetibilidad del movimiento de la válvula. Los movimientos de dilatación y retracción de los elementos piezoeléctricos son casi instantáneos. Esta velocidad de reacción permite una dosificación aún más precisa del combustible inyectado y un mayor número de inyecciones por ciclo.
El combustible bombeado ingresa al inyector a través del collar de alimentación de combustible y el exceso puede regresar al tanque a través del collar de retorno de combustible.
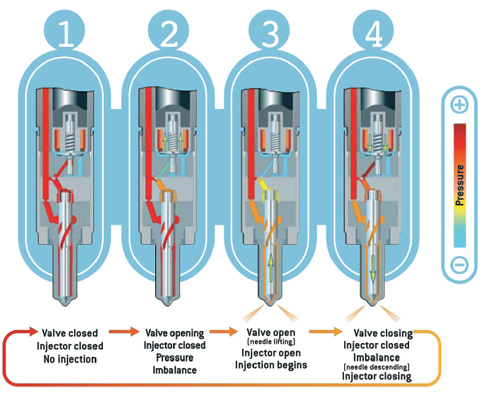
El seguidor del árbol de levas presiona el émbolo en la parte superior para presurizar el combustible en el inyector. La válvula piezoeléctrica controla la liberación de este combustible a alta presión a través de la boquilla del inyector hacia la cámara de combustión. Aquí el combustible se dispara. Sin una válvula electrónica, el combustible se presurizaría y se inyectaría en la cámara de combustión. El control del tiempo, el volumen, etc. sería muy pobre.
Con una válvula piezoeléctrica, la sincronización, el volumen, etc. se pueden controlar con mayor precisión. La válvula piezoeléctrica puede abrirse y cerrarse tan rápido que es posible recibir un número variable de inyecciones de una carga de combustible. Esto beneficia enormemente la economía de combustible y el control de la contaminación.
Al aplicar voltaje al elemento piezoeléctrico, se crea una extensión. Esta extensión depende del voltaje y la cantidad de elementos piezoeléctricos.
El elemento piezo se extiende
La estructura de movimiento hidráulico se mueve hacia abajo.
La válvula de tres vías se mueve hacia abajo.
La aguja está siendo levantada
• Comprobar resistencia
Asegúrese de que el encendido esté apagado y que el motor no arranque.
Desconecte el conector del inyector de dos pines.
Conecte un ohmímetro entre cada uno de los terminales del inyector y la carcasa del inyector. Ninguno de los dos debe estar conectado a la carcasa (Tierra o «-«).
Luego, conecte el ohmímetro entre los terminales del conector del inyector. La resistencia debe estar entre 150 y 210 kiloohmios.
Descripción general El sensor de presión del riel común está ubicado en el riel de combustible. Su función es controlar la presión del combustible en Common Rail, mediante la intervension de la PCM para dicho monitoreo
El ECM utiliza el sensor como parte del cálculo del% de ciclo de trabajo aplicado a la válvula de control de presión de combustible y a la válvula de control de cantidad de combustible. Es un sensor de tres cables: + 5V alimentado desde el ECM, señal de salida y tierra. El rango de salida es 0.5 ÷ 4.5V para los sensores de presión de riel Bosch, Delphi y Siemens y 1.0 ÷ 4.2V – para los sensores Denso.
Funcionamiento
La medición de la presión resulta de la flexión de un diafragma de acero en el que se encuentran los elementos de galgas extensométricas de polisilicio. Estos están conectados en forma de un puente de Wheatstone. Esto permite una alta utilización de la señal y una buena compensación de temperatura. La señal de medición se amplifica en un IC de evaluación y se corrige con respecto al desplazamiento y la sensibilidad. En este punto, la compensación de temperatura vuelve a tener lugar de modo que la unidad calibrada que comprende la celda de medición y el ASIC solo tiene un nivel de dependencia de temperatura muy bajo. Parte de la evaluación IC se aplica para una función de diagnóstico que puede detectar los siguientes defectos potenciales: – Fractura de un cable de unión a la celda de medición. – Fractura en cualquier lugar de cualquiera de las líneas de señal. – Fractura del suministro del puente y tierra.
Orden para verificar la funcionalidad del sensor de presión common rail
• Prueba de la señal de salida
Conecte el cable de tierra del osciloscopio a la tierra del chasis.
Arranque el motor y lo dejó en ralentí.
Conecte la sonda activa al cable de salida del sensor (generalmente en el medio).
Mira la pantalla del osciloscopio. La presión debe estar en el rango de 25 a 35MPa durante el ralentí del motor.
Presione el acelerador bruscamente y luego suéltelo, la presión debe aumentar hasta 100MPa y luego reducirse a alrededor de 30MPa.
• Posibles fallas en el sensor de presión de common rail: – Señal de salida caótica
La señal de salida caótica es, cuando la señal de voltaje cambia aleatoriamente, cae a cero y desaparece. Esto generalmente ocurre cuando hay un sensor ineficiente de presión de riel común. En este caso, el sensor debe ser reemplazado.
– Falta de voltaje de señal
Compruebe si se aplica la tensión de alimentación (+ 5.0V).
Verifique si hay problemas de conexión a tierra.
Si el voltaje de alimentación y la conexión a tierra son correctos, verifique el cable de señal entre el sensor de presión del riel común y el controlador a bordo.
Si la tensión de alimentación y / o la conexión a tierra no son correctas, verifique el estado de los cables entre el sensor y la ECU.
Si todos los cables del sensor son correctos, verifique todas las conexiones para el voltaje de referencia y tierra del controlador a bordo. Si son correctos bajo sospecha cae la ECU.
– La fuente de alimentación o señal del sensor de presión del riel común es igual al voltaje de la batería del automóvil.
Compruebe si hay un cortocircuito en el terminal positivo de la batería del automóvil.
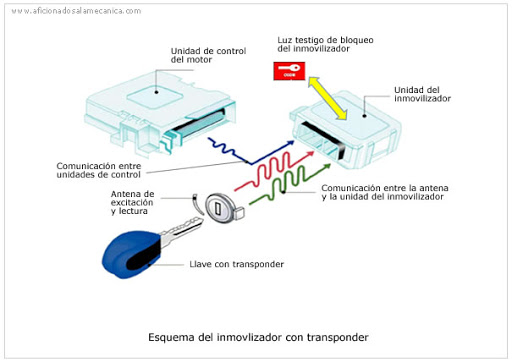
En el sistema de antirrobo y/o inmovilizador automotriz con transponder, la llave cuenta en su interior con un pequeño chip transponder que es un componente ya sea cerámico, de cristal o electrónico, que emite un código por radiofrecuencia en el momento en que ponemos la llave para abrir contacto. Este código es captado por una antena o unidad lectora, normalmente ubicada en el conmutador de arranque.
CHIP TANSPONDER DE CÓDIGO FIJO
Son aquellos transponders que en cada ocasión que son “interrogados” por el Sistema de seguridad (Inmovilizador) del Vehículo, responden con el mismo código
CHIP TRANSPONDER DE CÓDIGO EVOLUTIVO
Son aquellos transponders que en cada ocasión que son “interrogados” por el Sistema de seguridad (Inmovilizador) del Vehículo, responden con un código diferente que evoluciona en base a un algoritmo de evolución. A día de hoy este tipo de sistemas son incopiables y tampoco pueden ser activados en el vehículo. Estos sistemas son usados por varias marcas de vehículos actuales.
CHIP TRANSPONDER DE CÓDIGO «CRIPTO» O CRIPTADO
Son aquellos transponders que en cada ocasión donde son “interrogados” por el Sistema de seguridad (Inmovilizador) del Vehículo, responden con el mismo código, pero este código va “tapado” o enmascarado por un programa. En estos casos sólo podrán activarse o programarse transponders iguales a los de la llave original mediante equipos especiales.
Chip Cerámica y Cristal
Este tipo de chip solo varía en función de los requerimientos del fabricante del coche. La información que pueden capturar es diferente y también varía según el fabricante de cada chip.
Cabezal electrónico
Los transponders de este tipo, se encuentran en llaves de última generación, sirven para duplicar chips de generación 4D Lock y encriptado. No es necesario conectarse al coche para realizar el duplicado, siempre y cuando el cliente tenga en su poder al menos una de las llaves. Para duplicar las llaves que tengan cabezal electrónico es obligatorio el uso de internet y de una máquina 4D para clonar.
Transponder Fijo RO: Son aquellos transponder que en cada ocasión que son «interrogados» por el Sistema de seguridad (Inmovilizador) del vehículo, responden con el mismo código. En este caso se puede duplicar sin ningún problema en maquinas de escritorio siempre y cuando se tenga como mínimo una copia; en caso de no tener ninguna copia funcional del vehículo se requiere de la presencia del mismo para poder generarle nuevas llaves al computador. (En algunos casos se puede requerir un código de seguridad).
Transponder Crypto RW: Son aquellos transponder que en cada ocasión donde son «interrogados» por el Sistema de seguridad (Inmovilizador) del vehículo, responden con el mismo código, pero este código va «tapado» o enmascarado por un programa. En estos casos sólo podrán activarse o programarse transponder iguales a los de la llave original mediante equipos especiales; estos chips se encuentran protegidos por el fabricante. Adicionalmente la información de seguridad varía cada vez que el vehículo es encendido, de esta manera los hace más seguros y difíciles de clonar; sin embargo estos chips actualmente pueden clonados con una computadora especial, siempre con el vehículo presente y su código de seguridad según la marca.
Transponder Rolling Code o Evolutivo RW: Son aquellos transponder que en cada ocasión que son «interrogados» por el Sistema de seguridad (Inmovilizador) del vehículo, responden con un código diferente que cambia en base a un algoritmo de evolución.
Estos sistemas son usados por varias marcas de vehículos en la actualidad. Es un sistema más seguro, admite hasta 18 millones de billones de combinaciones. Este sistema hace que los códigos cambien cada vez que se utiliza la llave.
Lo complicado es que la llave guarda una parte de la información y el computador del vehiculo guarda la otra, denominado «información por bloques». De esta manera, podemos duplicar la información de la llave pero por ningún motivo podemos duplicar la información del computador del vehiculo.
Tipos de chip y un tipo de cabezal.
Chip Cerámica o Cristal: Este simplemente cambia según los requerimientos del fabricante del vehículo, varían en el tipo de información que pueden capturar y la marca del fabricante de los chips.
Chip en cristal: Transponder con cápsula de cristal.
Chip en cerámica: Transponder bajo cápsula de cerámica, tiene mayor insensibilidad a objetos metálicos próximos en comparación con el transponder con cápsula de cristal
Cabezal Electrónico: Realiza las misma función del transponder con la diferencia que este cabezal es regrabable. Lleva batería en su interior y cuando la misma se agota, deja de funcionar.
Familias de transponders por Identificación (ID)
Transponder códigos fijo: TP ID 11, 12, 33, 40, 4C
Transponder Crypto ( 1ra generación): TP ID 4D, 4D60 al 70
Transponder Crypto ( 2da generación): TP ID 46
Transponder Crypto Megamos ( Línea VAG -VW-Audi-Seat-Skoda): TP ID 48, 22 al 25
Transponder Rolling Code: BMW – MB – MINI – Land Rover (ID Rolling code)
Transponders Clonables: Son transponders en blanco que sirven para grabar la información de un transponder original.
Para clonar TP de código FIJO: TPX1
Para clonar TP Crypto 1ra. generación: TPX2
Para clonar Crypto 2da. generación: TPX3 y TPX4
Los Rolling code no se pueden clonar al igual que los Crypo Megamos
Transponders para casos especiales: En algunos casos es necesario utilizar transponders especiales para poder realizar nuevas llaves.
Estos tranponders son ID T5 – ID PCF7930 al PCF7946
Por ejemplo: Si se desea realizar un llave con transponders ID 33, al efectuar la lectura y querer programar, el equipo programador solicitará utlizar un transponder ID PCF7930, 31 o 35
Funacionamiento del transponder, ejemplo Texas – TIRIS – FM
Para el funcionamiento del transponder se distinguen dos etapas:
Energización del transponder: Genera la alimentación que le provee potencia.
Transmisión de datos: Modo donde los datos almacenados son transmitidos.
Un sistema de frecuencia modulada FM es usado para poder separar ambas etapas.
El principal objetivo de las luces es algo obvio en un principio ya que cuando cae la noche la visibilidad se limita y es por ello que debemos emplear los dispositivos de iluminación para iluminar el camino y así mantener una conducción segura . También podemos utilizarlos como señales de aviso a otros conductores acerca de la presencia del vehículo, posición, tamaño, dirección de desplazamiento y las intenciones del conductor.
Tipos de luces automotrices
luces de posición
de cruce
de largo alcance
intermitentes
luces antiniebla
luces de freno
luces de emergencia
Un foco se puede considerar como una pieza de recambio con una vida útil limitada. Sin embargo, el foco es parte del sistema de iluminación. Es un componente activo de una unidad donde todos los elementos deben ser perfectamente ajustados entre sí.
El sensor MAP (Manifold Air Pressure ) canaliza una señal a la ECU para ajustar el tiempo y relación de aire/combustible basándose en la cantidad de presión en el múltiple de admisión. Detecta las variaciones de presión en el interior del múltiple de admisión según también los cambios de carga y velocidad
El sensor MAP está conectado al múltiple de admisión a través de una manguera de vacío. El vacío en el múltiple de admisión acciona el diafragma del sensor de MAP. El convertidor transforma la presión medida en una señal eléctrica que se alimenta al ECU. La ECU estima los datos de los valores del sensor MAP como: «Presión absoluta» = «Presión atmosférica» - «presión múltiple».
Al utilizar el método de velocidad / densidad, el ECU calcula la composición de la mezcla de combustible en función de la señal de MAP y la velocidad del motor. Este método se basa en la teoría de que con cada giro el motor aspira un volumen fijo de aire. La precisión de este método no se puede comparar con la del sensor de cantidad de aire, que después de una medición precisa del flujo de aire calcula la relación de mezcla de combustible en función de la masa o el volumen de aire aspirado del motor.
Cuando hay un alto nivel de vacío en el colector de admisión (por ejemplo, inactivo), la señal de salida MAP es relativamente baja y ECU proporciona menos combustible.
En sistemas con colector de admisión de tipo «húmedo» (por ejemplo, SPi), los cambios en la presión del colector pueden hacer que el combustible que ingresa a la manguera de vacío alcance el MAP. Para evitar esto, se utiliza una trampa especial y, en consecuencia, se traza la manguera de vacío. Si el combustible llega al sensor MAP, su diafragma puede dañarse.
En los sistemas MPi, el colector es de tipo «seco» y el combustible no puede entrar cuando se rocía sobre las válvulas de admisión. Por lo tanto, no hay riesgo de penetración de combustible del sensor de MAP y contaminación del diafragma, y por lo tanto no se usa una trampa especial. Cuando el sensor MAP está integrado en el controlador integrado, el posible reemplazo del MAP requerirá el reemplazo de todo el controlador.
Sensor MAP analógico
Inspección general inicial
Conecte un medidor de vacío entre el colector de admisión y el sensor MAP, utilizando una junta en T.
Dejó el motor al ralentí. Si el vacío en el motor es pequeño (menos de 570 mbar a 700 mbar), verifique la presencia de las siguientes fallas:
Despresurización
Tubo de vacío dañado o agrietado;
Manguera de vacío bloqueada;
Problema mecánico del motor, como la correa de distribución mal ajustada que acciona el árbol de levas;
Fugas en la membrana del sensor de MAP (si el sensor está integrado en el controlador integrado).
Desconecte el medidor de vacío y conecte en su lugar una bomba de vacío.
Con la bomba, cree un vacío de alrededor de 750 mbar (75 kPa) en el sensor de MAP.
Apague la bomba de vacío. La membrana del sensor debe mantener el mismo valor de vacío al menos 30 segundos.
Conecte el terminal negativo de un voltímetro de CC a la tierra del chasis.
Identifique la tensión de alimentación, señal y terminales de tierra.
Una el terminal positivo del voltímetro al cable de señal del sensor MAP.
Desconecte la manguera de vacío del sensor.
Conecte el sensor MAP a una bomba de vacío.
Encienda el encendido (pero no arranque el motor).
Compare el voltaje con el valor regulatorio para este tipo de vehículo y motor.
Cree vacío con el valor mencionado en la Tabla 1 y controle la suavidad del cambio de voltaje.
Los resultados de los motores turbo (Tabla 3) son diferentes de los resultados de los motores «atmosféricos» (Tabla 2).
Vacio Aplicado Mbar
Voltaje V
Valor del MAP Bar
0
4.3 – 4.9
1.0 ± 0.1
200
3.2
0.8
400
2.2
0.6
500
1.2 – 2.0
0.5
600
1.0
0.4
Condicion
Voltaje V
Valor MAP Bar
Vacio Bar
Cuerpo de aceleración abierto al 100%
4.35
1.0 ± 0.1
0
Motor encendido
4.35
1.0 ± 0.1
0
Ralenti
1.5
0.28 – 0.55
0.72 – 0.45
Motor apagado
1.0
0.20 – 0.25
0.80 – 0.75
Condicion
Voltaje
Valor MAP Bar
Vacio Bar
Cuerpo de aceleración abierto al 100%
2.2
1.0 ± 0.1
0
Encendido Conectado
2.2
1.0 ± 0.1
0
Ralenti
0.2 – 0.6
0.28 – 0.55
0.72 – 0.45
Sensor MAP digital
Determine el suministro de voltaje, señal y terminales de tierra.
Conecte la sonda de tierra del osciloscopio a la tierra del chasis y el extremo activo, al cable de señal de salida del sensor.
Encender el motor. Debe observar una forma de onda similar a la de la figura
Si tiene un lector de fallas y puede leer el cambio de velocidad del motor, realice el proceso que se describe a continuación.
Aumente la velocidad del motor a 4500 – 4900 rpm.
Conecte una bomba de vacío a la manguera de vacío del sensor de MAP. El vacío debe mantenerse al mismo nivel para todos los valores de voltaje.
Vacio MBar
La velocidad debe reducirse a:
200
525 ± 120 rpm
400
1008 ± 120 rpm
600
1460 ± 120 rpm
800
1880 ± 120 rpm
Cuando se corta la presión, el valor medido del número de ciclos debe ser igual a la posición inicial – 4500 – 4900 rpm.
Reemplace el sensor MAP, si funciona de manera diferente a la descrita anteriormente.
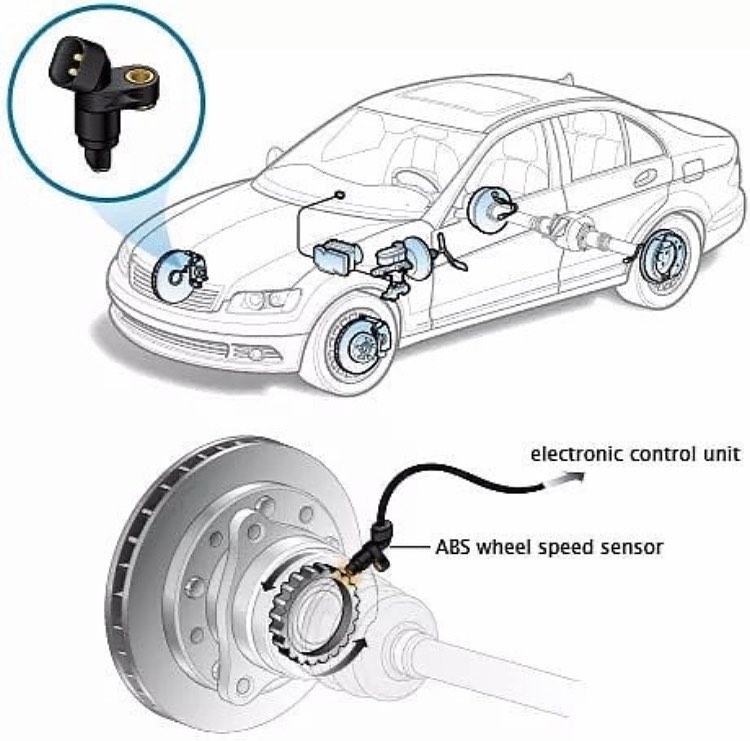
La función principal del sistema ABS es controlar la velocidad de las ruedas cuando se presiona el pedal del freno monitoreando si alguna de las ruedas disminuye su velocidad más rápido que las demás. Esto significa que existe la posibilidad de un «bloque» de rueda. Lo que ahora se llama «Control de estabilidad» ESP y es mucho más avanzado que el ABS estándar. Los autos nuevos están equipados con un sistema antideslizante, que básicamente funciona frente al ABS. Si hay algún aumento en la velocidad individual de cualquiera de las ruedas al acelerar, esta rueda es alimentada por presión de disminución para reducir la diferencia. Durante este tiempo, la unidad de control electrónico cambia el par.
La unidad hidroneumática incorpora acumulador hidráulico, bomba electrohidráulica y válvulas. Las válvulas ajustables individualmente se montan en pares en cada rueda: válvula de entrada normalmente abierta y válvula de salida normalmente cerrada. Al controlar estas válvulas, la ECU aumenta, disminuye o mantiene una presión constante en las canalizaciones del freno.
En el estado inicial de la unidad hidroneumática, las dos válvulas electromagnéticas y el motor de la bomba hidráulica están vacíos. La cámara del freno está conectada al cilindro maestro a través de la válvula de salida abierta y la válvula de entrada está cerrada.
A presiones de funcionamiento normales (sin «bloque» de la rueda) el líquido de frenos pasa del cilindro maestro a la cámara del freno sin restricción, ya que la presión del líquido en el cilindro y la cámara es igual y proporcional a la cantidad de presión aplicada en el pedal del freno . En este caso, el ABS no afecta el sistema de frenos. Durante un freno de emergencia (posibilidad de “bloqueo” de la rueda), la ECU controla los electroimanes de dos válvulas simultáneamente, lo que hace que funcionen.
La válvula de entrada libera la cámara del freno del cilindro maestro y la válvula de salida la conecta con el acumulador hidráulico, reduciendo así la presión. Simultáneamente, la ECU enciende el motor de la bomba hidráulica para devolver el líquido del acumulador hidráulico en el cilindro maestro. La presión de la cámara del freno continúa disminuyendo. Cuando desaparece la posibilidad de bloqueo de la rueda, la ECU cierra la válvula de salida. La cámara del freno se desconecta del cilindro maestro y del acumulador hidráulico, y la presión en la cámara permanece constante y menor que el cilindro maestro. Cuando aumenta la velocidad de la rueda, la ECU cierra la válvula de entrada que se abre y la cámara del freno se conecta nuevamente al cilindro maestro.
Si la rueda intenta bloquearse nuevamente, se iniciará el siguiente ciclo. La frecuencia del sistema es de 5Hz a 10Hz. Cuando el ABS funciona, la presión promedio en la cámara del freno no depende de la presión aplicada al pedal del freno. Está determinado por la ECU y depende de la condición de la superficie de la carretera. En su configuración completa, el ABS incluye cuatro sensores y cuatro pares de válvulas, lo que permite el control individual de cada rueda para lograr el máximo efecto y permite mantener la distribución diagonal de los actuadores de freno.
Tipos de sensores ABS
Pasiva (analógica) Activo (digital)
Sensor Pasivo
El sensor consiste en una bobina con un núcleo de magnetización. La salida del sensor es CA y genera un pulso de voltaje cada vez que cualquiera de los dientes de la rueda dentada giratoria pasa a través del campo magnético del sensor. La forma de la señal de salida depende de varios factores:
Intensidad del campo magnético interno del sensor;
Número de devanados de la bobina del sensor;
Forma de la rueda dentada giratoria;Distancia entre el sensor y la rueda dentada giratoria;
Velocidad a la que la rueda dentada pasa a lo largo del campo magnético del sensor.
Cada uno de estos factores juega un papel importante en la formación de la señal de salida del sensor. Cuando uno de los dientes de la rueda dentada cae en el campo magnético del sensor, está presente un pico de voltaje positivo en la señal de salida, y después de abandonar el campo magnético está presente un pico de voltaje negativo, igual al positivo. El sensor tiene dos terminales de salida, uno de los cuales está conectado a tierra y el otro (señal) está conectado a la ECU. La señal de salida del sensor depende de la velocidad del automóvil: una velocidad más baja significa una amplitud de salida menor y el período de impulsos es mayor, y opuesto: a mayor velocidad, la amplitud es mayor y el período de pulsos es menor.
Sensor Activo
El sensor ABS activo ofrece la ventaja de poder leer a muy baja velocidad. Los sensores pasivos, normalmente dejan de leer alrededor de tres millas por hora. Los sensores activos más nuevos también pueden determinar la dirección de rotación. Se pueden construir mucho más pequeños que los sensores pasivos. A menudo se incorporan al conjunto de cojinete de rueda. Esto ahorra tiempo de montaje para el fabricante, pero aumenta considerablemente el costo de reparación.
Los frenos con sensores ABS activos producen una onda cuadrada, salida digital. El funcionamiento del sensor activo se puede comparar con el sensor de tipo Hall que se encuentra en los distribuidores, etc. El conjunto de recogida tiene un amplificador incorporado, que produce una señal fuerte incluso a una velocidad muy baja y, por lo tanto, se basa en un voltaje de alimentación, normalmente de 5V, pero Puede ser de 12V. El elemento giratorio consiste en un anillo magnético multipolar (norte-sur, norte-sur), que puede ubicarse en un conjunto giratorio como con el sensor pasivo.
Los polos magnéticos rotativos y alternos generan un flujo magnético dentro del elemento sensor, que luego amplifica y regula la señal para que la ECU la use como información de velocidad de la rueda. La salida de un sensor activo es capaz de enviar información de velocidad de la rueda hasta 0 Km/h, mientras que la precisión del sensor pasivo suele ser dudosa por debajo de 40 km/h
Los sensores activos generalmente tienen tres cables: fuente de alimentación (entrada de referencia), retorno de señal y tierra / blindaje. Pero algunos sensores activos tienen solo dos cables (voltaje de referencia y retorno de señal).
La caja de transferencia o caja transfer es un componente especializado que se usa en vehículos con tracción en las cuatro ruedas . Es esencial en los vehículos que utilizan los ejes delantero y trasero para conducir. Y en el caso de los 4×4, cada una de las cuatro ruedas necesita tracción.
En los términos más simples, una caja de transferencia dividirá la potencia del motor y la enviará a las cuatro ruedas usando los ejes delantero y trasero. Es el centro del sistema de transmisión en vehículos con tracción en las cuatro ruedas y en las cuatro ruedas. Los vehículos todoterreno pueden utilizar una caja de transferencia que contiene uno o más juegos de marchas más bajas para manejar el terreno más exigente.
Hay diferentes configuraciones de tracción y cada una requerirá un tipo diferente de caja de transferencia. Por ejemplo, un vehículo que siempre está en las cuatro ruedas tendrá el tipo más simple de caja de transferencia. Esto se compara con un 4WD a tiempo parcial o un 4WD «Activo» más moderno, que tendrá sistemas más complejos para operar el vehículo en diferentes modos de manejo
Una caja de transferencia recibe energía del motor y la desvía hacia los ejes delantero y trasero. Los diferenciales también ayudarán a desembolsar la potencia para que el automóvil se maneje lo mejor posible. Algunas cajas de transferencia usarán cadenas, algunas usarán sistemas hidráulicos y otras usarán engranajes.
Las cajas de transferencia en vehículos AWD y 4WD son solo un ejemplo del complejo sistema de transmisión que impulsa su automóvil. La tracción pasa del motor a la transmisión, y luego la transmisión envía tracción al resto de los componentes que realmente mueven el automóvil. Los ejes de transmisión, los diferenciales, las cajas de transferencia, los ejes de transmisión y las ruedas deben funcionar al unísono para que su vehículo funcione bien.
Componentes de la Caja transfer
¿Qué es 2H 4H 4L?
2H – Marchas largas y tracción en un solo eje. Solo transmite potencia a dos ruedas. Lo más recomendable para carretera y uso habitual en condiciones normales.
4H – Marchas largas y tracción en los dos eje. Tracción a las 4 ruedas. Transmite la potencia a ambos ejes, es lo ideal para conducción en terrenos con falta de adherencia como nieve no muy espesa o terrenos algo resbaladizos, arenosos, etc.
4L – o 4WD Marchas cortas o reductora 4×4. Es la opción para los terrenos más duros y complejos como barro, gran cantidad de agua o terrenos con un gran desnivel. De esta funcionalidad la transfer recibe el nombre de caja reductora 4×4.
La transmision CVT (continuously variable transmission) por sus siglas en ingles utiliza un variador doble, y mediante unas poleas unidas entre si por una correa de acero, Cada polea se mueve por presión hidráulica, Esta presión que es alimentada por la bomba de aceite de la CVT esto con el fin de determinar la separación entre poleas y la relación de velocidad a la cual estará sometida. La posición de las poleas se efectúa de tal manera que la correa este siempre en tensión para evitar una dislocación de está que provocaría que la transmision se dañe y se neutralice
En función posición del pedal de acelerador y de la palanca selectora. el sistema hidráulico determina la separación de la apertura de las poleas para así ejecutar el cambio requerido. La velocidad hacia adelante o hacia atrás lo proporciona un conjunto de sincronización convencional
Las poleas vareadoras como ya se menciono utilizan un mecanismo similar al de la bicicleta donde la cadena o correa siempre se encuentra tensada, pero eso to lo hace gracias a un cambio de dimensiones de sprockets o en este caso una variación en el diámetro de las poleas que lo hacen gracias a un trabajo electrohidraulico que con presión y fluido hidráulico generan esa variación de diámetros gracias a que se expanden o se cierran las poleas para dar movimiento descendente y ascendente a la correa de metal
Componentes de la transmision CVT
Mecanísmo de velocidades
(posición D: Drive)
La transmisión de la fuerza comienza en el volante motor, el cual transmite el movimiento al árbol primario de la caja de cambios. Estando el embrague de las marchas hacia adelante cerrado y el freno abierto, se hacen solidarios con el árbol primario el porta-satélites y la corona de salida del engranaje epicicloidal formando un bloque de giro, con lo que el movimiento se transmite a la polea conductora. Por medio de la correa metálica la fuerza llega a la polea conducida y mientras el vehículo esté quieto pero con el motor arrancado, el embrague de arranque permanecerá abierto para impedir la transmisión. En el momento que se selecciona la D en la palanca de cambios, se suelta el freno y se pisa el acelerador, el embrague de arranque se cierra progresivamente y comienza a transmitir el movimiento al árbol intermediario y de este al diferencial y a las ruedas de tracción.
(posición R: Reverse)
La transmisión de fuerza comienza en el volante motor, el cual transmite el movimiento al árbol primario de la caja de cambios. Estando el embrague de las marchas hacia adelante abierto y el freno cerrado se hace solidario el porta-satélites a la carcasa de la caja de cambios. Con lo que el piñón planetario gira haciendo girar en sentido opuesto a los satélites sobre sus propios ejes (ya que el porta-satélites ahora está fijo). Esto fuerza a la corona de salida a girar en sentido opuesto consiguiendo que la polea conductora gire hacia atrás. A partir de aquí se transmite todo el movimiento en sentido de giro contrario desde la polea conducida hasta las ruedas. Así se provoca el movimiento del vehículo hacia atrás.
(posición N: Neutral)
El motor de combustión está arrancado y el volante motor girando, el cual transmite el movimiento al árbol primario de la caja de cambios. El embrague de marcha adelante está cerrado y el freno abierto, por lo que se transmite el movimiento a la polea conductora y de esta a la conducida. Sin embargo, el embrague de arranque permanece abierto y el movimiento no se transmite al árbol intermediario ni al diferencial. Por consiguiente, el vehículo no se mueve por la acción del motor, pero permite su movimiento si es empujado o si está en una pendiente ya que tanto el tren de rodaje como el árbol intermediario y el diferencial permanecen desbloqueados. De igual manera sería posible el movimiento del vehículo si el motor estuviese parado y fuese empujado o estuviera en una pendiente.
– Parking (posición P)
El motor de combustión puede estar arrancado o parado. Estando arrancado el motor transmite el movimiento al árbol primario de la caja de cambios. El embrague de marcha adelante está cerrado y el freno abierto, por lo que se transmite el movimiento a la polea conductora y de esta a la conducida. Sin embargo, el embrague de arranque permanece abierto y el movimiento no se transmite al árbol intermediario ni al diferencial. Por consiguiente, el vehículo no se mueve por la acción del motor. Y tampoco se puede mover por una acción externa o una pendiente debido a que el mecanismo de accionamiento mantiene bloqueado el árbol intermedio, el diferencial y por lo tanto las ruedas. El mecanismo de estacionamiento consiste en un trinquete que enclava el engranaje de estacionamiento haciéndolo solidario con la carcasa. Este engranaje está montado junto al embrague de arranque y es solidario al piñón de salida que transmite el movimiento desde el árbol secundario hacia el árbol intermediario.
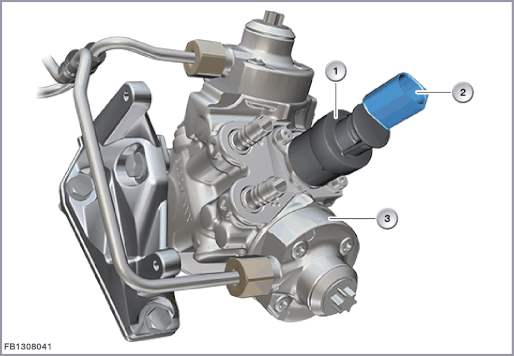
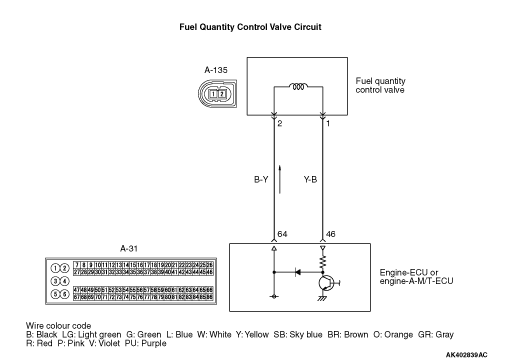
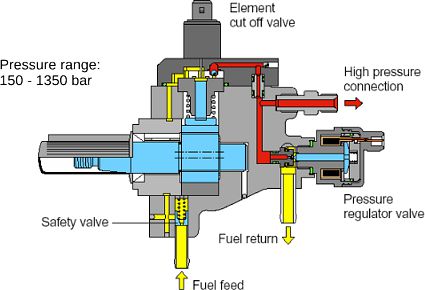

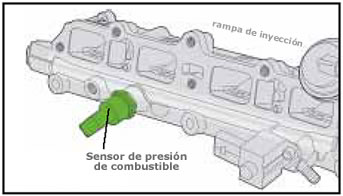




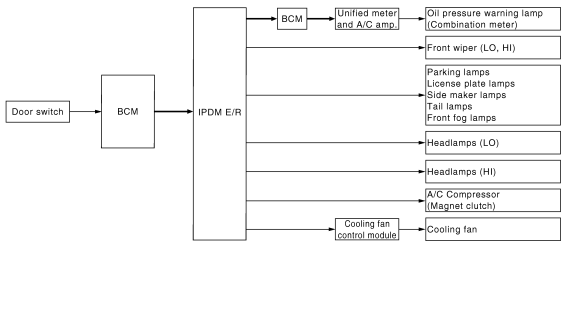
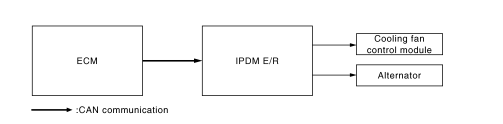
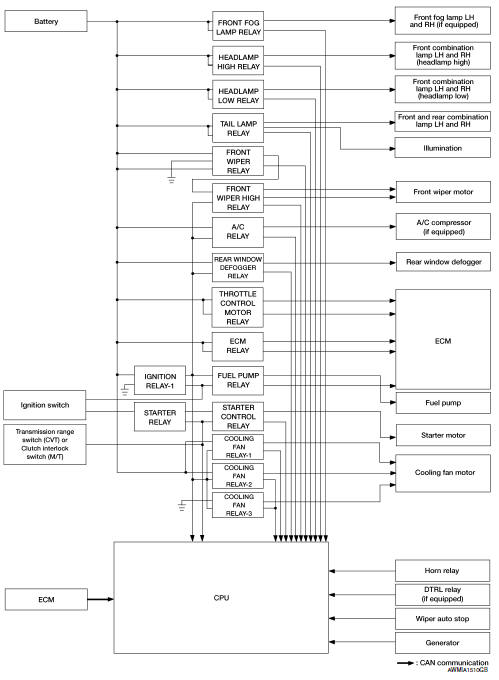
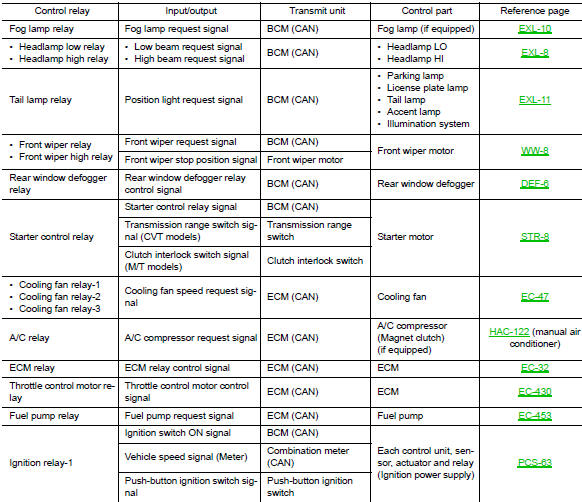
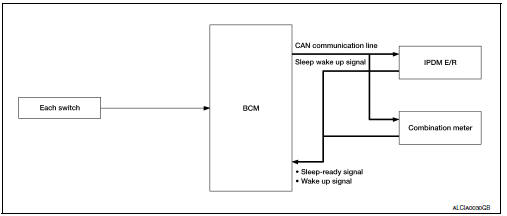
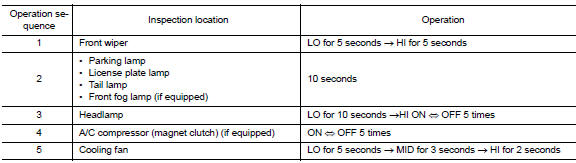
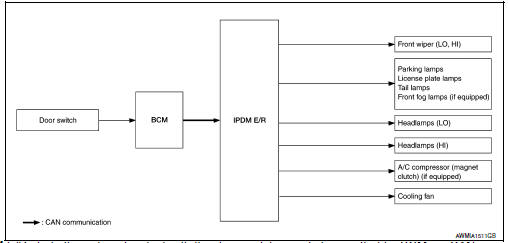

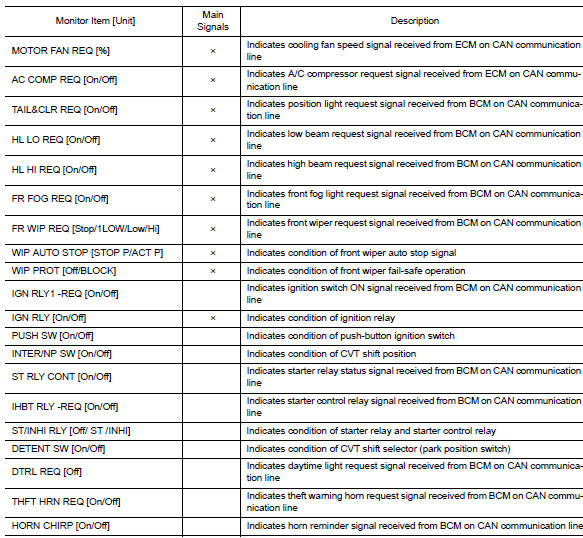






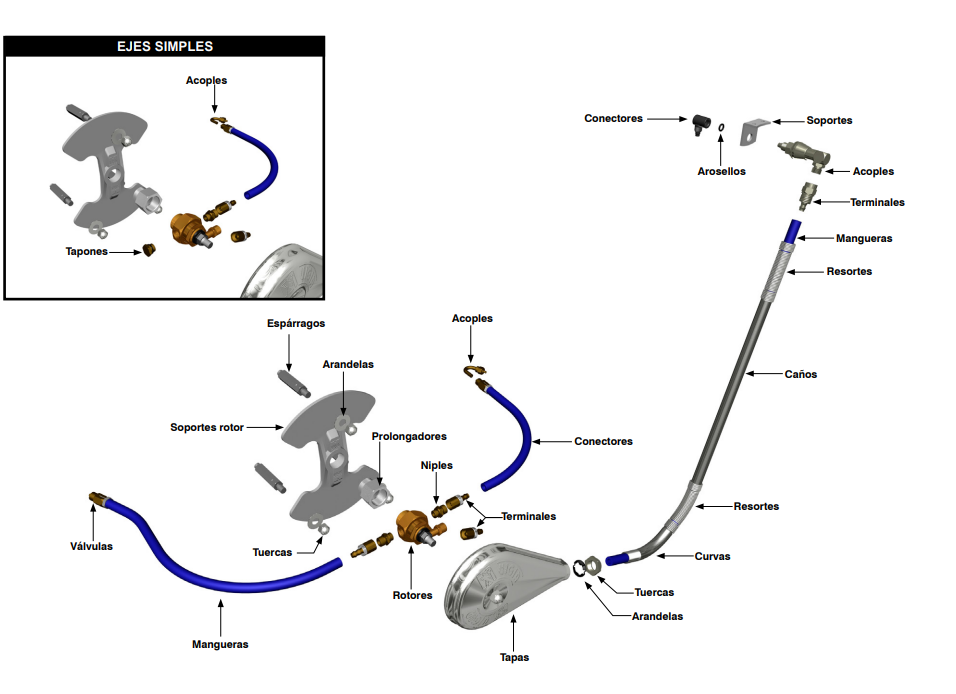
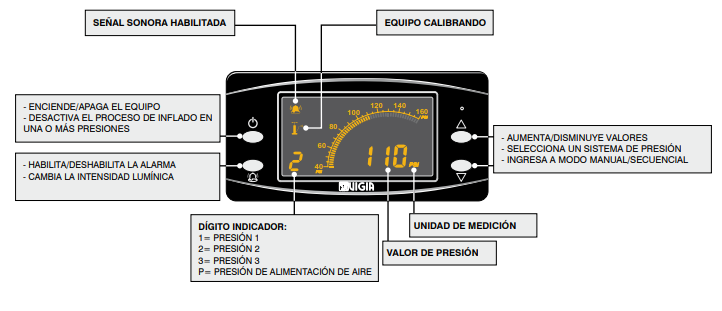
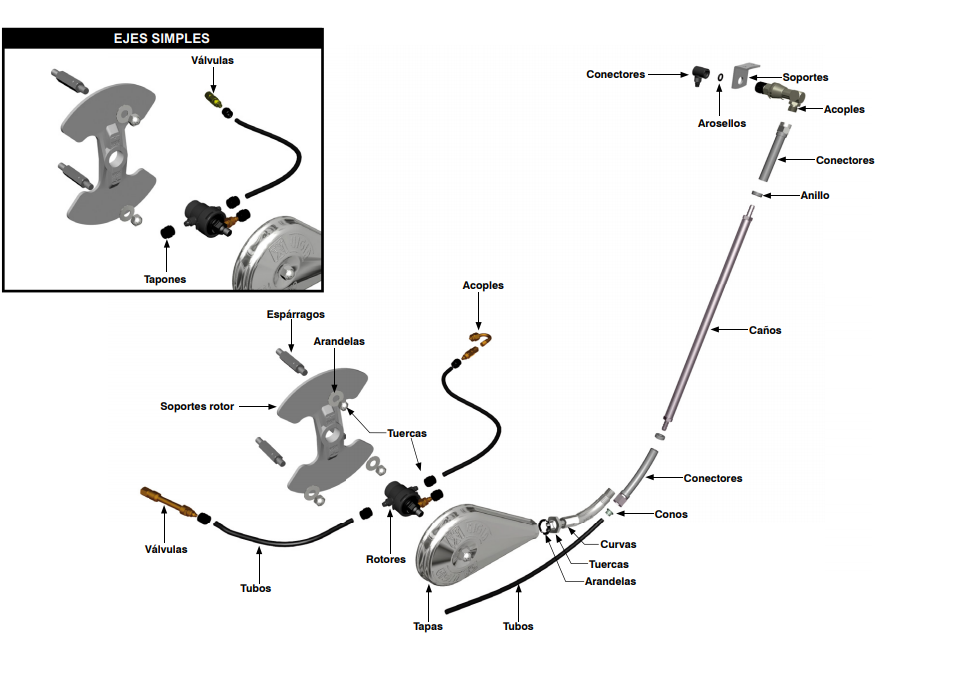



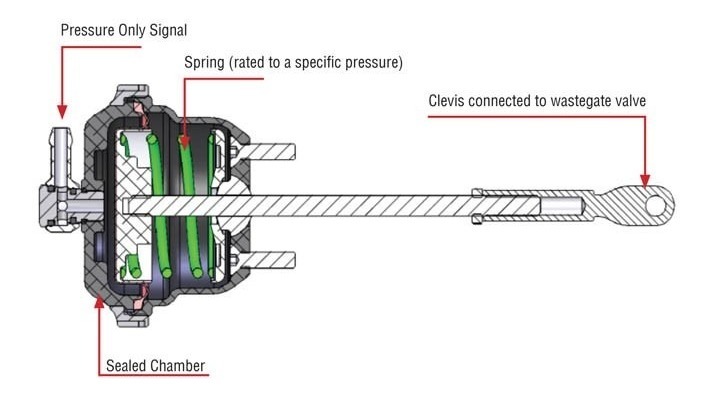


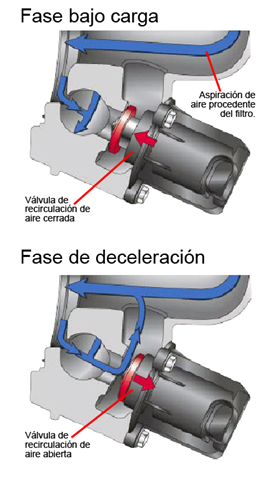
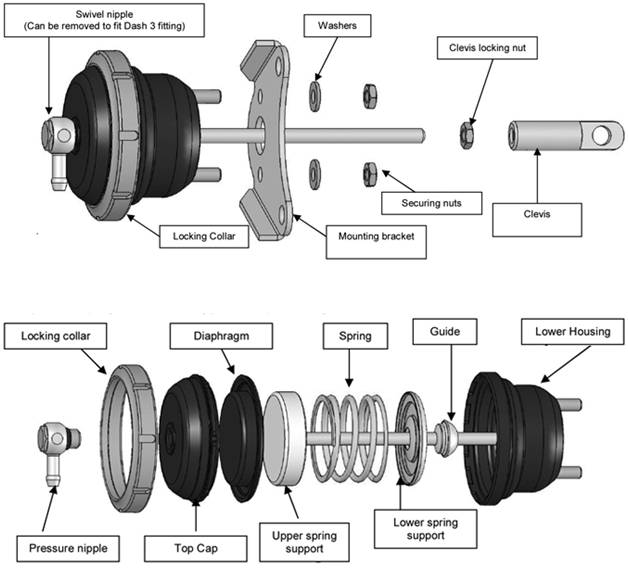
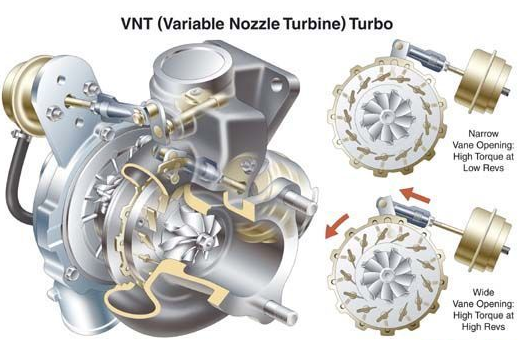

/index_clip_image004.jpg)

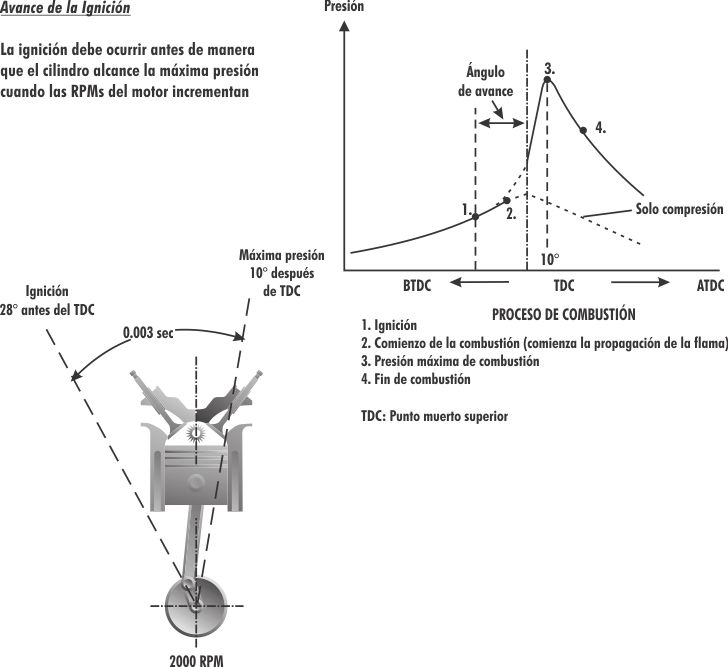

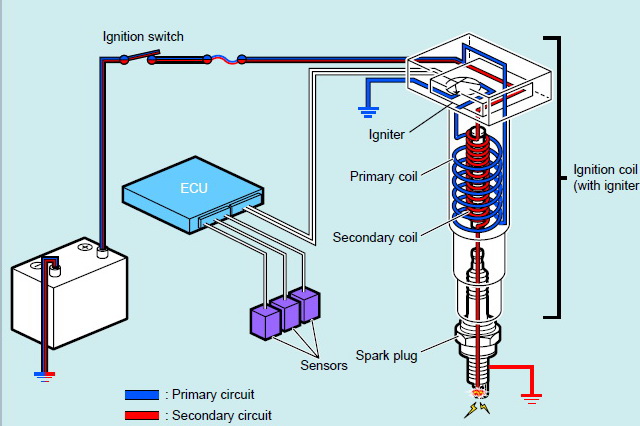
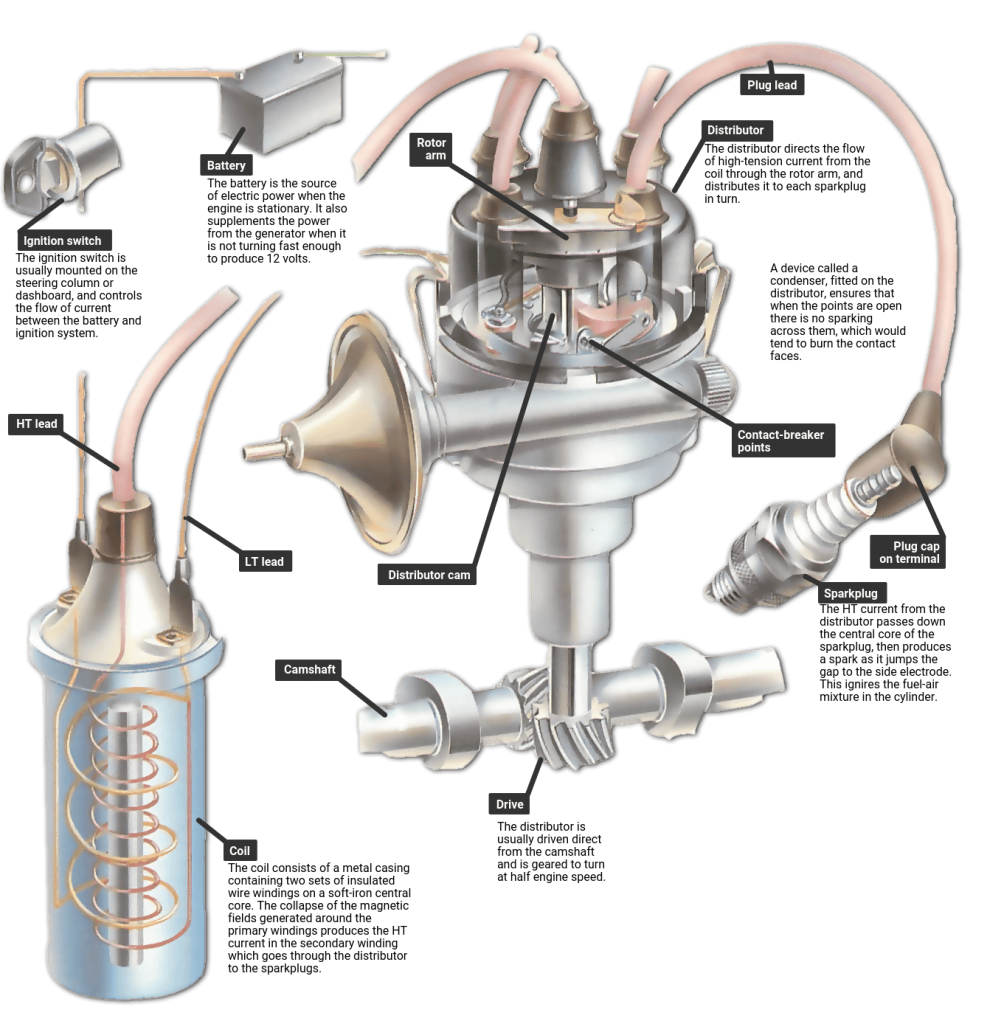
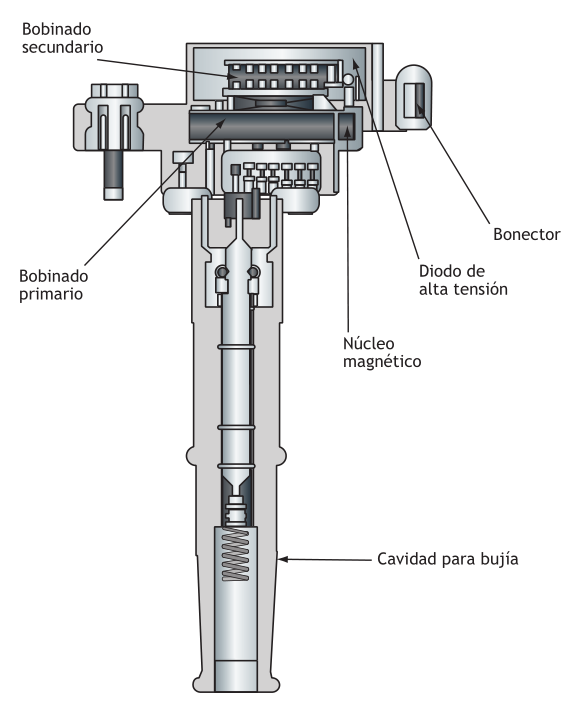


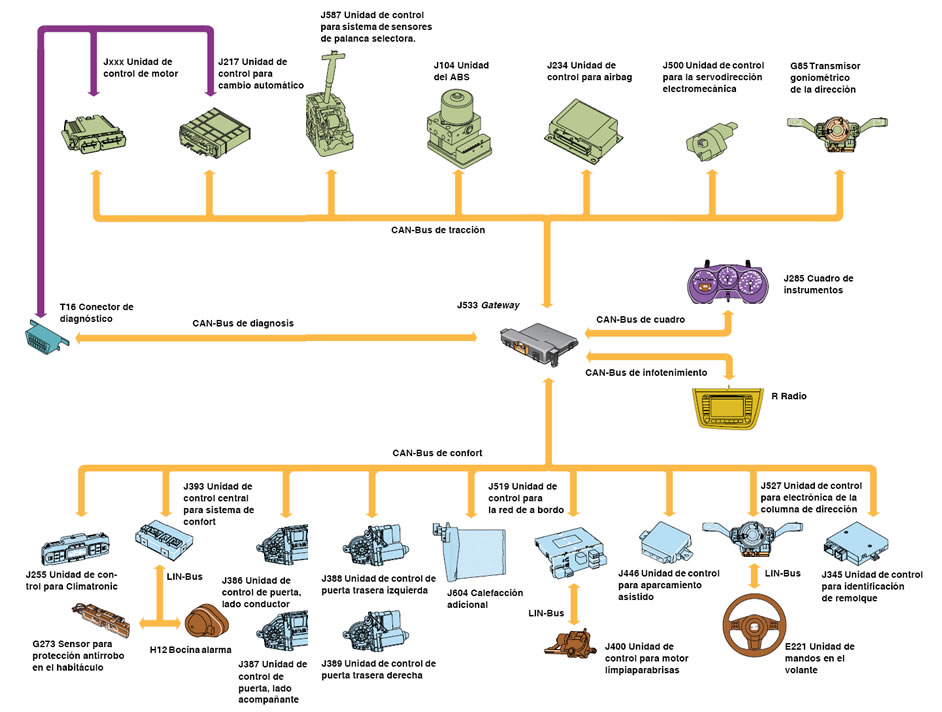
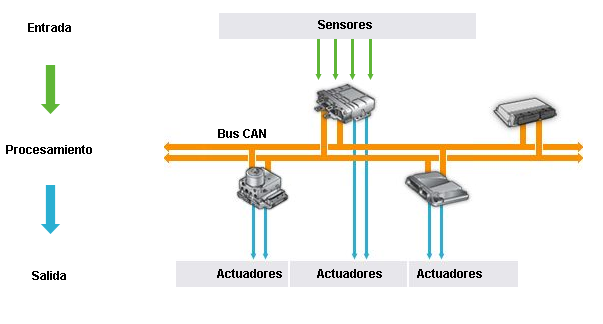
/index_clip_image004_0003.jpg)

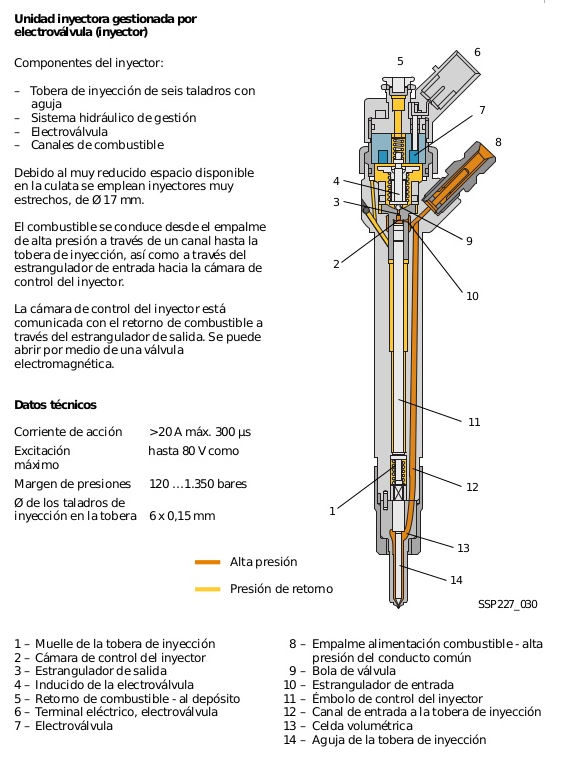
/index_clip_image004_0000.jpg)