Descripción general
El bus CAN (Controller Area Network) por sus siglas en ingles, es un bus automotriz desarrollado por Bosch, que permite que los microcontroladores y dispositivos se comuniquen entre sí dentro de un vehículo sin una computadora host. El bus CAN es un protocolo basado en mensajes, diseñado específicamente para aplicaciones automotrices, pero ahora también se usa en otras áreas como aeroespacial, automatización industrial y equipos médicos.
Conecta los sistemas y sensores individuales como una alternativa a los telares de cables múltiples convencionales. Permite que los componentes automotrices se comuniquen en un bus de datos en red de uno o dos cables de hasta 1 Mbps.
El bus CAN es uno de los cinco protocolos utilizados en el estándar de diagnóstico del vehículo OBD-II.
Funcionamiento
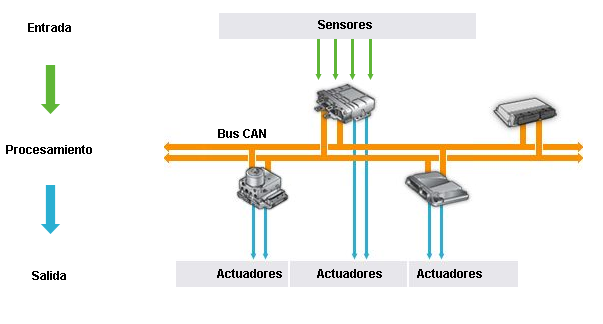
El bus CAN utiliza dos cables dedicados para la comunicación. Los cables se llaman CAN alto y CAN bajo. El controlador CAN está conectado a todos los componentes de la red a través de estos dos cables. Cada nodo de red tiene un identificador único. Todas las ECU en el bus están efectivamente en paralelo y es por eso que todos los nodos ven todos los datos, todo el tiempo. Un nodo solo responde cuando detecta su propio identificador. Los nodos individuales se pueden eliminar de la red sin afectar a los otros nodos.
Cuando el bus CAN está en modo inactivo, ambas líneas transportan 2.5V. Cuando se transmiten bits de datos, la línea alta CAN pasa a 3.75V y la baja CAN baja a 1.25V, generando un diferencial de 2.5V entre las líneas: cada una de las líneas CAN está referenciada a la otra, no a la tierra del vehículo . Dado que la comunicación se basa en un diferencial de voltaje entre las dos líneas de bus, el bus CAN NO es sensible a picos inductivos, campos eléctricos u otros ruidos. Esto hace que el bus CAN sea una opción confiable para comunicaciones en red en equipos móviles.
/index_clip_image004_0003.jpg)
La alimentación CAN se puede suministrar a través del bus CAN. O una fuente de alimentación para los módulos de bus CAN se puede organizar por separado. El cableado de la fuente de alimentación puede estar totalmente separado de las líneas del bus CAN, lo que da como resultado que se utilicen dos cables de 2 hilos para la red, o puede integrarse en el mismo cable que las líneas del bus CAN, lo que da como resultado un solo cable de 4 hilos.
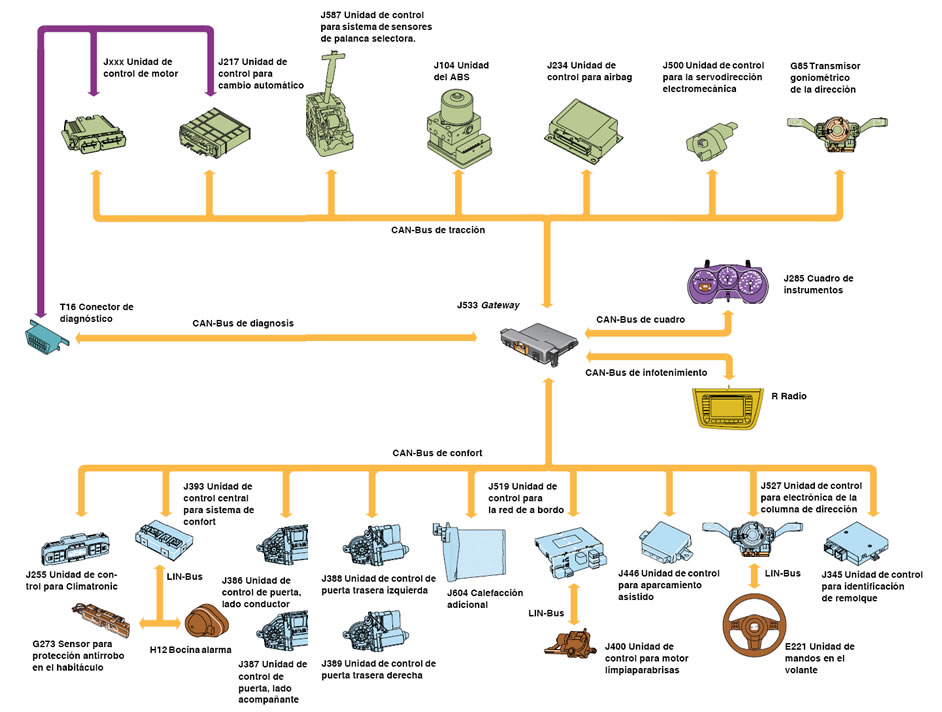
La naturaleza de las comunicaciones del bus CAN permite que todos los módulos transmitan y reciban datos en el bus. Cualquier módulo puede transmitir datos, que recibe el resto de los módulos. Es muy importante que el ancho de banda del bus CAN se asigne primero a los sistemas más críticos para la seguridad. Los nodos generalmente se asignan a uno de varios niveles de prioridad. Por ejemplo, los controles del motor, los frenos y las bolsas de aire son muy importantes desde el punto de vista de la seguridad, y los comandos para activar estos sistemas tienen la máxima prioridad. Esto significa que se actuarán antes que los menos críticos. Los dispositivos de audio y navegación suelen ser de prioridad media, y la activación de la iluminación puede ser la prioridad más baja. Un proceso conocido como arbitraje decide la prioridad de cualquier mensaje.
La mayoría de las redes CAN de vehículos motorizados funcionan a una velocidad de bus de 250 kB / so 500 kB / s. Los últimos vehículos utilizan hasta 3 redes CAN separadas, generalmente de diferentes velocidades conectadas entre sí por puertas de enlace. Los datos en una de las tres redes están disponibles para las otras dos redes. Las funciones de gestión del motor generalmente se encuentran en un bus de alta velocidad a 500 kB / sy los sistemas de chasis funcionan en un bus CAN más lento de 250 kB / s. Otras funciones, como luces, satnav y espejos, se encuentran en un bus LIN (red de interconexión local) de baja velocidad y un solo cable.
Posibles problemas para fallas en la red CAN BUS :
• Los niveles de voltaje pico a pico no son correctos.
• La señal no está presente en ambos cables CAN.
El estándar ISO 11898 enumera varios modos de falla del cable del bus CAN:
- CAN_H interrumpido
- CAN_L interrumpido
- CAN_H en cortocircuito al voltaje de la batería
- CAN_L en cortocircuito a tierra
- CAN_H en cortocircuito a tierra
- CAN_L en cortocircuito al voltaje de la batería
- CAN_L en corto a cable CAN_H
- CAN_H y CAN_L interrumpidos en la misma ubicación
- Pérdida de conexión a la red de terminación.
Muy buena la infornación
Saludos
Gracias Javier!!
Sigan apoyando co conocimiento gracias
Saludos
Gracias
Saludos
Genial ha sido la explicación mas práctica y entendible que he encontrado. gracias
Saludos amigo Juan
Exelente quier saber usar esa erramienta y mucho mas
Saludos
gracias por compartir
Saludos
Ok muy buen material
Saludos
Ok
Saludos
Muy buenas enseñanzas
Saludos
El cam bus + y el cam bus –
Deben de tener continuidad si lo pruebo de un cable a el otro
Así es
gracias por la informacion
Saludos
talves me podria ayudar con mas informacion sobre el can bus de traccion por favor y sus posibles fallos
Saludos
existe algún otro falla a parte de la que haz mencionado para que falle en la red can bus
Por lo general perdidas de comunicaciòn asi como inmobilizaciòn
En definitiva es un buen canal de información. A sabiendas que poco a poco la comunicación inalámbrica está a la vuelta de la esquina no va a pasar mucho tiempo antes que los cables sean eliminados. será entonces adquirir conocimientos más avanzados de comunicaciones, uso de computadoras y los distintos protocolos de información.
saludos.
Saludos
Excelente presentación, saludos
Saludos
Buena explicación, me gustaria que se publicara diagramas de conexión de los canbus a las radios de los coches.
hola como puedo chequear si hay comunicacion del CAN-L o H, por ejemplo saliendo del sensor al TCM y/o al PCM, que equipo debo usar.
gracias.
Luis
Construccion de una maqueta funcional con todos los elementos de una red de datos can-bus para el taller de Ingenieria en Mantenimiento Automotriz de la Universidad Tecnica del Norte La construccion de una ?Maqueta funcional con todos los elementos de una red de datos CAN BUS para el taller de ingenieria en mantenimiento automotriz de la Universidad Tecnica del Norte?, se desarrolla a partir de la necesidad de conocer los diferentes elementos que conforman dicho sistema, ademas de estudiar la manera se realiza la transferencia de informacion a traves de los modulos electronicos que son parte del sistema. El presente proyecto investigativo, muestra el funcionamiento de un sistema multiplexado de una manera practica de igual manera como funciona en un auto que contenga un sistema de transferencia de datos CAN BUS el cual sera muy necesario como herramienta de trabajo para estudiantes y docentes en el estudio de sistemas multiplexados ya que los diferentes elementos estan dispuestos de tal manera que puedan ser manipulados facilmente. Para la fabricacion de la maqueta se utilizara los elementos electronicos de un auto Peugeot 206 14c ano 2006, una estructura metalica, un tablero didactico en donde se asentaran los equipos electronicos antes mencionados y un interfaz desarrollado por la empresa PSA con el que se podra interactuar con la maqueta Los resultados obtenidos demuestran la eficiencia del sistema electronico estudiado. Este es un sistema muy efectivo al momento de transmitir la informacion pues da prioridad a las fallas que se muestra en el vehiculo haciendolo mas seguro ademas que este sistema que maneja menos sensores ya que el mismo sensor proporciona la misma informacion para diferentes sistemas electronicos.
Saludos amigos, gracias por la información,,