FOUR WHEEL STEERING SYSTEM: FUNCTIONS, REQUIREMENTS, MODES OF OPERATION AND APPLICATION
Four-wheel steering, 4WS, also called rear-wheel steering or all-wheel steering, provides a means to actively steer the rear wheels during turning maneuvers. A system that uses all four wheels to steer the car. The steering angle is usually limited to 2° or 3°. Turning the rear wheels in the opposite direction to the front at slow speeds can allow faster maneuvering and a much tighter turning radius. Turning the rear wheels in the same direction as those at the front at high speed allows sudden lane changes with much greater stability. Turning the rear wheels in the same direction as the front when parking makes parallel parking much easier. Four-wheel steering is a relatively new technology that improves maneuverability in cars, trucks and trailers.
FUNCTIONS
• To provide directional stability of vehicle
• To facilitate straight ahead recovery
• To minimize tire wear
• To absorb major parts of the road shocks
• To provide perfect rolling motions of the road wheels
REQUIREMENTS
The steering system has the following requirements:
• The steering system must be able to turn the front wheels sharply yet easily and smoothly.
• The steering should be made lighter at low speeds and heavier at high speeds.
• Smooth recovery while the vehicle is turning.
• Minimum transmission of shock from road surface.
MODES OF 4WS

1. Two Wheel Steer:
A 4-Wheel Steering System is flexible enough to work as a 2-wheel steer by restricting the rear wheel movement.
2. Four Wheel Steer/ Slow Speeds:
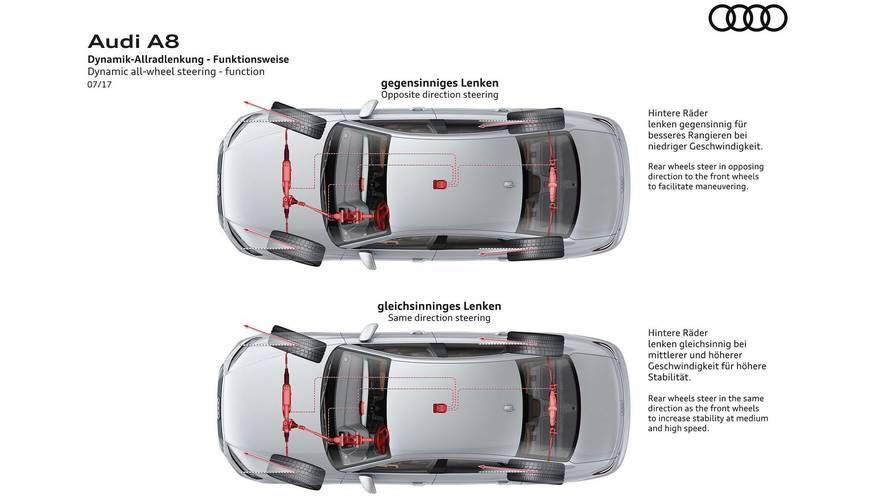
Front wheel directions are opposite to rear wheel directions. This helps to take sharp turn with least turning radius.
At slow speeds, the rear wheels turn in the direction opposite to the front wheels. It can reduce the turning circle radius by 25%, and can be equally effective in congested city conditions, where U-turns and tight streets are made easier to navigate.
3. Crab Steer Mode/ High Speeds:
At high speed lane change, both the front and rear wheels face in same direction.
In high speeds, turning the rear wheels through an angle opposite to front wheels might lead to vehicle instability and is thus unsuitable. Hence, at speeds above 80 kmph, the rear wheels are turned in the same direction of front wheels in four-wheel steering systems.
4. Zero turn:
Front and Rear wheels are so aligned that the vehicle moves in a circle of ‘’zero radius’’.
APPLICATIONS

• Parking:
During a parking a vehicles driver typically turns the steering wheels through a large angle to achieve a small tuning radius. By counter phase steering of the rear wheels, 4ws system realizes a smaller turning radius then is possible with 2ws system. As a result, vehicle is turned in small radius at parking.
• Junctions:
On a cross roads or other junction where roads intersect at 900 degrees or tighter angles, counter phase steering of the rear wheels causes the front and rear wheels to follow more or-less path. As a result, the vehicle can be turned easily at a junction.
• Slippery road surfaces:
During steering operation on low friction surfaces, steering of the rear wheels suppress sideways drift of the vehicle’s rear end. As a result, the vehicles direction is easier to control.
• High-speed straight-line operation:
When traveling in a straight line at high speed, a vehicle’s driver frequently needs to make small steering correction to maintain the desired direction, in phase steering of the rear wheels minimizes these corrective steering inputs.
• Narrow roads:
On narrow roads with tight bends, counter-phase steering of the rear wheels minimizes the vehicle’s turning radius, thereby reducing side-to –side rotation of the steering wheels and making the vehicle easier to turn.
ADVANTAGES
• Car more efficient and stable on cornering.
• Improved steering responsiveness and precision.
• High-speed straight-line stability.
• Notable improvement in rapid, easier, safer lane changing maneuvers.
• Smaller turning radius and tight space maneuverability at low speed.
• Relative Wheel Angles and their Control.
• Risk of hitting an obstacle is greatly reduced
Buenísimo el aporte. Reciba un cordial saludo.
Saludos